Tehnologistic Train-O-Matic Lokommander II Next18 ECU User manual
by
DCC-Decoder für Tillig ECU
Lokomotive
Bedienungsanleitung Lokommander II Next18 ECU
User Manual

by
© 2022 Tehnologistic SRL
Alle Rechte vorbehalten
Keiner Teil dieser Publikation darf in irgendeiner Form oder auf irgendeine Weise, sei es elektronisch oder
mechanisch, einschließlich Fotokopieren, reproduziert oder übertragen werden, ohne die vorherige
schriftliche Zustimmung von
Tehnologistic Ltd.
zu beantragen.
Dieses Dokument unterliegt technischen Änderungen

by
Inhaltsverzeichnis
1. Wichtige Informationen.............................................................................................................................6
2. Verwendete Abkürzungen .........................................................................................................................7
3. Inhalt der Bedienungsanleitung .................................................................................................................8
4. Hauptmerkmale..........................................................................................................................................9
5. Technische Spezifikationen .....................................................................................................................10
6. Allgemeine Beschreibung der Lokommander II Decoder .......................................................................11
7. Decoder installation .................................................................................................................................13
8. Einrichten des Decoders ..........................................................................................................................14
9. Die Adresse des Decoders .......................................................................................................................15
10. Geschwindigkeitseinstellungen................................................................................................................17
10.1. Lineare Geschwindigkeitseinstellung in 3 Punkten.....................................................................18
10.2. Tabellarische Geschwindigkeitseinstellung in 28 Stufen ............................................................19
11. Motorsteuerung........................................................................................................................................21
12. Kontrollierte Haltestellen.........................................................................................................................31
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 4 von 122
12.1. Konstanter Bremsweg (CBD)......................................................................................................31
12.1.1. Stopp mit festen Verzögerungen............................................................................................31
12.1.2. Stopp Sie mit variablen Verzögerungen.................................................................................32
12.2. Erkennung des asymmetrischen DCC-Signals (Lenz ABC) .......................................................32
12.3. Pendelzugbetrieb..........................................................................................................................34
12.3.1. Ohne Zwischenstopps ............................................................................................................34
12.3.2. Mit Zwischenstopps ...............................................................................................................35
12.4. Spezielle Bremsfunktionen ..........................................................................................................36
13. Funktionsausgänge...................................................................................................................................37
14. Analogbetrieb (DC) .................................................................................................................................43
14.1. Analogmodus 1 ............................................................................................................................43
14.2. Analogmodus 2 ............................................................................................................................44
14.3. Kontrollierte Stopp im DC Sektor ...............................................................................................45
15. Bidirektionale Kommunikation (RailCom) .............................................................................................46
16. Spezielle Funktionen................................................................................................................................47
17. Automatische Entkupplung......................................................................................................................50

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 5 von 122
18. SUSI.........................................................................................................................................................53
18.1. Programmieren von SUSI-Modulen ...................................................................................................53
19. Verwendung externer Kondensatoren oder von eines power pack.........................................................55
20. Rücksetzung des Decoders/Reset ............................................................................................................58
21. Sekundäre Adresse (blockiert das Programmieren des Decoders) ..........................................................59
22. Firmware aktualisieren.............................................................................................................................61
23. Ergänzendes .............................................................................................................................................62
24. Technischer Unterstützung ......................................................................................................................62
25. Die CV-Tabelle des Decoders .................................................................................................................63
26. Anhang Bits und Bytes ..........................................................................................................................116

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 6 von 122
1. Wichtige Informationen
Bitte lesen Sie diese primären Kapitel sorgfältig durch!
Die Lokommader Decoders sind ausschließlich zur Verwendung für elektronische Lokommotive
gemacht. Jede andere Verwendung ist streng verboten.
Trennen Sie die Stromversorgung (Trafo oder Netzteil) vollständig, wenn Sie den Decoder
anschließen oder trennen.Vermeiden Sie es, Schläge oder mechanischen Druck auf den Decoder
auszuüben.
Entfernen Sie nicht den Schrumpfschlauch am Decoder (bei Modellen mit Schutzmanschette).
Stellen Sie sicher, dass weder der Lokommander II-Decoder noch die nicht verwendeten Kabel sich
in elektrischen Kontakt mit dem Fahrgestell der Lokommotive (Kurzschlussgefahr) befinden.
Isolieren sie die Enden der unbenutzten Kabel.
Verlöten Sie keine Verlängerungskabel auf der Decoderplatine, es sei denn, dies ist unbedingt
erforderlich (Anschlüsse an Soundmodule, Netzteil / power pack).
Es ist verboten, den Decoder in ein Isolierband zu wickeln, da dies zu Überhitzung führen kann.
Führen Sie die Verdrahtung zu und von externen Komponenten, wie in dieser Anleitung empfohlen.
Eine falsche Verdrahtung / Verbindung kann den Lokommander II-Decoder beschädigen.
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 7 von 122
2. Verwendete Abkürzungen
ABC
- automatische Kontrolle der Bremsen
n.c.
- nicht verbunden
AC
- Wechselstrom
NMRA
- National Model Railroad Association
BEMF
- erzeugte Gegen EMK des Motors
PID
- Proportional–Integral–Derivative
CBD
- Konstanter Bremsweg
PoM
- Programming On the Main
Clk
- Clock
PT
- Programming Track
CV
- Konfigurationsvariablen
RailCom
- Bidirectional Communication Protocol
DC
- Gleichstrom
REV
- Rückwärts
DCC
- Digitale Befehlssteuerung
RL
- Licht hinten
FL
- Licht vorne
SPP
- Smart Power Pack
FWD
- Vorwärts
SUSI
- Serial User Standard Interface
GND
- Masse, negative
Spannungsversorgung, V-
V+
- Positive Versorgungsspannung, (+)
gemeinsam
LSB
- Niedrigstwertige Bit (order Byte)
Vmax
- Maximale Geschwindigkeit
MI
- Wartungsintervall
Vmid
- Mittlere Geschwindigkeit
MSB
- Höchstwertiges Bit (oder Byte)
Vmin
- Mindestgeschwindigkeit
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 8 von 122
3. Inhalt der Bedienungsanleitung
Sehr geehrter Kunde, wir gratulieren Ihnen zum Kauf eines Lokommander II Decoders.
Dieses Bedienungsanleitung ist in mehrere Kapitel unterteilt, die Ihnen Schritt für Schritt zeigen, wie Sie
einen Lokommander II-Decoder installieren und anpassen.
Allgemeine Beschreibung der Lokommander II Decoder enthalten Details über die verschiedenen
Formfaktoren der Lokommander II Decoder zusammen mit der Beschreibung der verfügbaren
Anschlüsse.
Decoder-Installation und Einrichten des Decoders enthält Einzelheiten zur Installation der Decoder.
Lokommander II kann die meisten auf dem Markt erhältlichen Elektromotoren steuern. Es wird
empfohlen, beim Lesen dieses Kapitels Informationen über den verwendeten Elektromotor zur
Verfügung zu haben.
Die nächsten Kapitel enthalten nützliche Informationen über die Decoderadresse / Sekundäradresse
(Decodersperre), Motorsteuerung, Start-, Stopp- und Geschwindigkeitseinstellungen, das Einrichten
von Funktionen und den digitalen und analogen Betrieb.
Die vollständige Liste der CVs mit werkseitig voreingestellten Werten und Wertebereichen finden
Sie in der CV-Tabelle am Ende des Handbuchs.
Bits und Bytes enthalten Informationen zu den dezimal-binären Systemen.

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 9 von 122
4. Hauptmerkmale
Generischer DCC-Mobildecoder, NMRA, NEM und RCN RailCommunity Normen kompatibel1
PT oder PoM Programmiermodus
analog Funktionsweise (DC), Konfiguration der aktiven Funktionen in für DC
Kurze (1-127) und lange (128-9999) konfigurierbare Adressen
14, 28/128 Fahrstufen
Geschwindigkeit kann man auf 3 Punkte (Vmin/mid/max) oder in Tabellenform eingestellt werd)
Vom Benutzer konfigurierbare Rangiergeschwindigkeit (über CV114)Acceleration / Deceleration
inhibition (using CV115)
Bremsen mit konstantem Abstand aktiviert auf ABC / DC-Sektor oder bei Geschwindigkeit Null.
Fahrt mit reduzierter Geschwindigkeit auf dem ABC-Sektor mit langsamer Geschwindigkeit
Belastungskompensation durch BEMF
Pendelsteuerung (push-pull Funktion)
bis zu 6 regulierbare Hilfsausgänge, maximaler Strom 300mA
Ausgangszuordnung zu den Funktionen F0, F1-F12
Kurzschluss- und Überstromschutz an allen Ausgängen (Motor und Hilfsenergie)
RAILCOM ® Bidirektionale Kommunikation
1See Tabelle 4 and Error! Reference source not found.

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 10 von 122
SUSI© Schnittstelle
Ausgänge für Smart Power Pack (SPP ©)
Funktion zur Steuerung von elektromagnetischen Kupplungen (Decoupling, Entkupplung)
Software, die vom Programmierer und mit dem an der Lokomotive angebrachten Decoder
nachrüstbar ist
Die kleine Größen ermöglichen den Einsatz auf der Skala H0, TT (auch bei N)
Maximaler Motorstrom von 1000 mA
5. Technische Spezifikationen
Versorgungsspannung: 4-24 V, Spannung von den Schienen (DCC)
Leistungsaufnahme ohne Ausgänge: <10 mA
Maximalstrom für jeden Ausgang: 200 mA
Minimalstrom für den Decoder: 400 mA
Größe (Ohne Kable und Stecker): Siehe Tabelle 1
Gewicht: 4-6 g
Schutzklasse: IP00
Betriebstemperatur: 0 ÷ +60 ºC
Lagertemperatur: -20 ÷ +60 ºC
Luftfeuchtigkeit: max 85%
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 11 von 122
6. Allgemeine Beschreibung der Lokommander II Decoder
Die Lokommander II-Decoder sind für den Einsatz in Modellen der Maßstäbe N, TT, H0 und H0e
ausgelegt. Der Unterschied zwischen Decodern besteht in der physischen Größe, dem Steckertyp, dem
maximalen Ausgangsstrom und der Anzahl der verfügbaren Hilfsausgänge. Als Programmierung und
Bedienung sind sie identisch. Dieses Handbuch bezieht sich auf die Next18-Decoder, die in den Tillig ECU-
Lokomotivmodellen verwendet werden.
Tabelle 1: Querverweis der Lokommander II-Serie
Modell
Stecker
Tillig Bestellcode
Größe mm
Größe Zoll
Micro N18
NEXT 18
66039
14.2x9.2x3
0.56x0.36x0.12

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 12 von 122
Das Lokommander II N18 ECU verfügt über einen NEXT 18- Stecker und Lötpads für den SPP-
Anschluss. Die Beschreibung der Stifte und Lötpads ist in Abbildung 1 unten dargestellt.
Untersicht
Draufsicht
Schiene Links
Motor Links
AUX 2
SUSI-Data/ AUX 4
GND
V+
AUX 5
RL
Schiene Rechts
Schiene Links
FL
AUX6
V+
GND
SUSI-Clk/ AUX3
AUX 1
Motor Rechts
Schiene Rechts
V+
Charge
GND
SPP
Abbildung 1: Lokommander II Micro N18

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 13 von 122
7. Decoder installation
Für die Installation des Decoders folgen Sie bitte der Bedienungsanleitung der Lokomotive
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 14 von 122
8. Einrichten des Decoders
Bevor Sie sich mit der digitalen Zentrale verbinden, stellen Sie bitte Folgendes sicher:
- Alle Verbindungen wurden korrekt hergestellt
- Es gibt keine Kurzschlüsse oder lockere/schlechte Verbindungen
- Die Verkabelung berührt keine beweglichen Teile
Wenn der zu programmierende Decoder bereits in einer Lokomotive installiert ist, wird empfohlen, ihn
auf einem Programmiergleis einzuschalten und sicherzustellen, dass nur er angeschlossen ist.
Die erste Aktion nach dem Einschalten besteht darin, einen Reset durchzuführen (beliebigen Wert außer
128 in CV8 schreiben), um sicherzustellen, dass die Werkseinstellungen geladen sind, und um die
gewünschte neue Adresse in CV1 einzustellen. Der Decoder wird mit der Standardadresse 3 geliefert, die
auch in eine erweiterte Adresse geändert werden kann (siehe Decoderadresse).
Während des Lese-/Schreibvorgangs sendet die Zentrale die Anforderungen und der Decoder sendet
einen Bestätigungsimpuls zurück, der >100 mA sein muss. In sehr wenigen Fällen werden die 100 mA nicht
erreicht, sodass die Zentrale die Bestätigung nicht empfangen kann. Zur Erhöhung des
Quittungsstromimpulses wird CV132 verwendet. Das Schalten von Bits auf 1 schaltet den spezifischen
Ausgang ein, sodass mehr Strom von der Lokomotive gezogen wird.
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 15 von 122
9. Die Adresse des Decoders
Der Lokommander II Decoder unterstützt entweder kurze (1÷127) oder lange (1÷9999) Adressen. Die
werkseitig voreingestellte Adresse ist kurz (CV29 werkseitig voreingestellter Wert ist 10, also Bit 5 = „0“)
und die Adresse ist 3 (CV1 = 3). Die Decoderadresse ist in CV1 gespeichert und kann mit der
Digitalzentrale geändert werden. Um die Decoderadresse ins Langformat zu ändern, setzen Sie Bit 5 von
CV29 auf „1“. Auf diese Weise hat der Decoder die lange Adresse in CV17 und CV18 gespeichert.
Die langen Adressen werden mit dem folgenden Algorithmus berechnet (in unserem Beispiel betrachten
wir die lange Adresse 2000)
- Teilen Sie die gewünschte lange Adresse durch 256 (in unserem Beispiel 2000 / 256 = 7, Rest = 208)
- Zum Ergebnis 192 addieren und in CV17 programmieren (7 + 192 = 199; in CV17 den Wert 199
programmieren)
- Programmieren Sie den Restwert der Teilung in CV18 (programmieren Sie den Wert von 208 in CV18)
Programmieren Sie CV 29, nachdem die lange Adresse in CV17 und CV18 gespeichert ist. Nach
Programmierung der 3 CVs wie oben beschrieben, kann der Decoder mit der Adresse 2000 angesprochen
werden. Ändern Sie Bit 5 von CV29 auf „0“, um wieder in den Kurzadressmodus zu wechseln.
Wenn ein Wert in CV1 geschrieben wird, wird die Consinst Adresse automatisch gelöscht und die
erweiterte Adresse automatisch deaktiviert!

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 16 von 122
Consist Adresse wird für Züge mit mehr als einem Motordecoder (und Motoren) verwendet. Die Zentrale
muss in der Lage sein, einzelne Befehle sowie globale Befehle an die Decoder in den mehrmotorigen Zügen
zu senden.
Die Lokommander II Decoder unterstützen die Advanced Consist Funktionen. Um diese Funktion zu
aktivieren, muss die Consist Adresse in CV19 eingestellt werden. Wenn der Inhalt von CV19 ungleich 0 ist,
führt der Decoder Funktionen aus, die in CV21 und CV22 definiert sind, wenn sie an die Consist Adresse
gesendet werden. Alle anderen Funktionen werden ausgeführt, während sie an die Basisadresse (definiert in
CV1 oder CV17/CV18) gesendet werden.
Funktionen in CV21 (F8-F1), CV22 (F12-F9, F0R, F0F) werden nicht ausgeführt, wenn sie an die
Basisadresse übertragen werden. Bei Bitwert „0“ wird die Funktion nur mit der Einzeladresse freigegeben,
bei Wert 1 wird die Funktion nur mit der Consist Adresse freigegeben (siehe Kapitel 26).
Beispiel: Wenn wir F0F, F0R, F3 und F4 mit Consist Adresse verwenden wollen, sind die folgenden Werte
in CV21 = 12 (00001100) und in CV22 = 3 (00000011) zu schreiben. Geschwindigkeits- und
Richtungsbefehle werden an alle gesendet Decoder innerhalb derselben bestehen. Auf diese Weise können
die Spitzenlichter (von Lokomotiven) und das Schlusslicht von Waggons basierend auf den an die Consist
Adressen gesendeten Richtungsbefehlen ein- und ausgeschaltet werden, während die Innenbeleuchtung in
verschiedenen Waggons basierend auf ihren individuellen Basisadressen ein- und ausgeschaltet werden
kann.
Im Consist-Modus können nur die Funktionen F0, F1-F12 verwendet werden. Die Fahrstufeneinstellung
in CV29 muss mit der Fahrstufeneinstellung der Zentrale sowohl für Basis- als auch für
Zugverbandsadressen übereinstimmen.

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 17 von 122
10. Geschwindigkeitseinstellungen
Dieses Kapitel enthält Informationen zur Einstellung der minimalen, mittleren und maximalen
Geschwindigkeit, Beschleunigung und Verzögerung der Lokomotive.
Die folgenden CVs werden verwendet, um die geschwindigkeitsbezogenen Parameter zu definieren:
- CV2: Motorstartdrehzahl (die niedrigste Fahrstufe) - Vmin
- CV5: Motormaximaldrehzahl (höchste Fahrstufe) - Vmax
- CV6: Motor mittlere Drehzahl - Vmid
- CV3: Beschleunigungsrate
- CV4: Verzögerungsrate
Die Motordrehzahl kann in 14, 28 oder 128 Fahrstufen geregelt werden. Die Verwendung von 128
Geschwindigkeitsstufen wird empfohlen, um einen reibungslosen Geschwindigkeitswechsel zu erreichen.
Die Geschwindigkeit kann über 3 Punkte oder über eine Geschwindigkeitstabelle eingestellt werden.
Beide Wege werden unten detailliert beschrieben.
Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 18 von 122
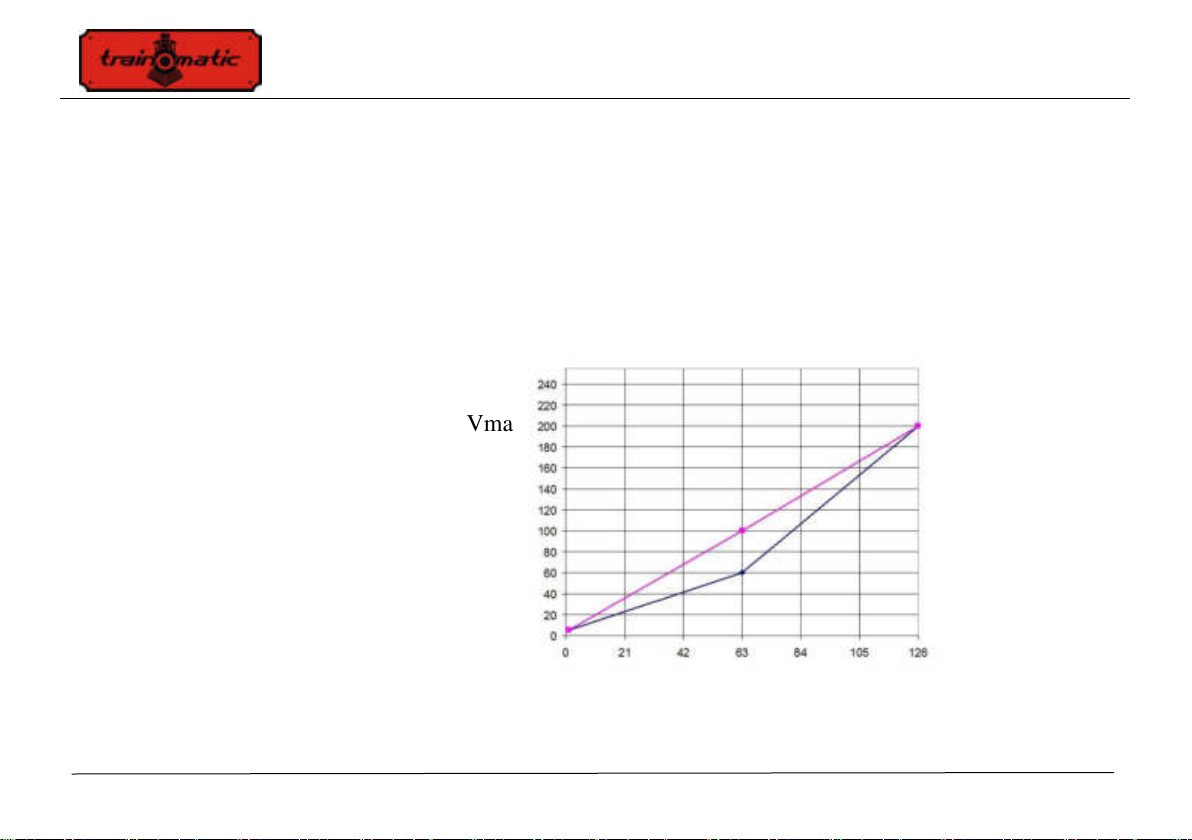
10.1. Lineare Geschwindigkeitseinstellung in 3 Punkten
Wenn Bit 4 von CV29 auf „0“ gesetzt ist, ist der 3-Punkte- Geschwindigkeitseinstellung modus
ausgewählt. Vmin (CV2) und Vmax (CV5) definieren die Motordrehzahlgrenzen für die erste und letzte
DCC-Fahrstufe.
Vmax
Vmid
Vmin
DCC-Fahrstufe
(0-126)
Interne
Geschwindigkeitsstufe
(0-255)
Bild 2: Geschwindigkeitseinstellung in 3 Punkten

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 19 von 122
Vmid (CV6) Die DCC-Stufenposition befindet sich in der Mitte zwischen Vmin und Vmax, wie in
Abbildung 7 gezeigt: 3-Punkte-Geschwindigkeitseinstellung.
Es wird bevorzugt, dass während des Beschleunigens oder Verlangsamens die Steigung zwischen Vmin
und Vmid kleiner ist, so dass die Änderungen in der Nähe von langsamen Geschwindigkeiten nicht sehr
schnell sind. Das bedeutet, dass Vmid < (Vmin + Vmax) / 2, die blaue Kurve in Abbildung 7: 3-Punkte-
Geschwindigkeitsanpassung.
Die Einstellung von Vmid auf 0 entspricht der Einstellung von Vmid = (Vmin + Vmax) / 2, sodass sich
die Motordrehzahl mit einer linearen Steigung von Vmin zu Vmax oder von Vmax zu Vmin ändert –die
violette Kurve in Abbildung 7: 3-Punkte-Geschwindigkeitsanpassung.
10.2. Tabellarische Geschwindigkeitseinstellung in 28 Stufen
Wenn Bit 4 von CV29 auf „1“ gesetzt ist, wird der tabellarische Geschwindigkeitseinstellung modus
ausgewählt (Figure 8: Tabular speed adjustment).
Die Motordrehzahlstufen werden in CV67÷CV94 definiert und gespeichert. Es kann eine beliebige
Geschwindigkeitskurvenform definiert werden.
CV66 für die Vorwärtstrimmung und CV95 für die Rückwärtstrimmung dienen der Feinabstimmung und
Geschwindigkeitsdifferenzierung nach Fahrtrichtung. Mit den voreingestellten Werten 0 haben diese CVs

Lokommander II Next18 ECU
Bedienungsanleitung firmware 5.10.306
Version 0.5.07
Seite 20 von 122
keine Wirkung. Bei anderen Werten wird die Geschwindigkeit mit dem CV-Wert/128 gewichtet
(multipliziert). Bei CV66 (95) = 128 wird die Geschwindigkeit nicht verändert. Bei Werten unter 128
verringert sich die tatsächliche Geschwindigkeit, bei höheren Werten als 128 erhöht sich die tatsächliche
Geschwindigkeit.
Um ein realistischeres Verhalten der Eisenbahnmodelle zu erreichen, kann die Motorbeschleunigung und
-verzögerung über die Fahrtrichtung mit CV152 und CV153 differenziert werden. Diese CVs haben den
werkseitigen Standardwert „0“, was bedeutet, dass CV3- und CV4-Werte auch für die Rückwärtsrichtung
verwendet werden. Wenn CV152 und/oder CV153 nicht „0“ sind, wird dieser Wert für die
Rückwärtsrichtung verwendet.
Internal speed step
(0-255)
Vmax
Vmin
DCC-Fahrstufe
(0-27)
Figure 3: Tabular speed adjustment
Table of contents
Languages:

















