2. Mechanical integration
2.1. Modular design (clip-on, clip-off)
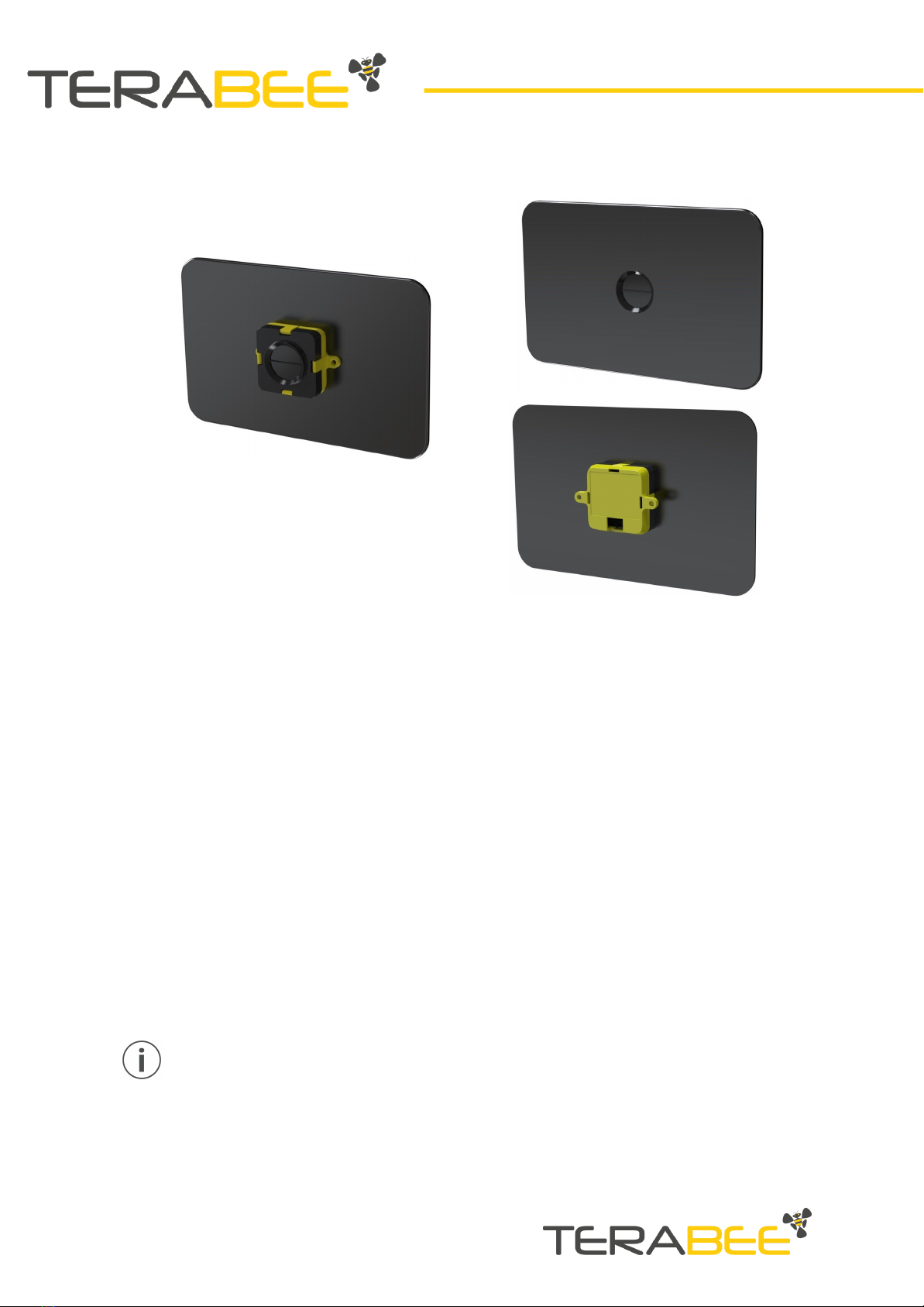
The mechanical design of the main sensor module (black) allows easy assembly to its
backboard (yellow) using a simple ‘clip-on’ technique. When clipping the two together,
please ensure there is no visible gap between the black and yellow parts.
Figure 2 -Modular design of the TeraRanger Evo Swipe sensor
2.2. Mechanical design and mounting
The TeraRanger Evo Swipe sensor offers an ABS housing (both: sensor and backboard)
with an option to mount the sensor using 2 holes compatible with M2 screws.
Figure 3 illustrates the external dimensions of the TeraRanger Evo Swipe sensor.
Copyright © Terabee 2020
Terabee, 90 Rue Henri Fabre
01630, St Genis-Pouilly, France (next to CERN)
6/14