Contents
Table of Contents
1. Introduction, Features and Applications.......................................................................................................................1
Introduction ............................................................................................................................................................. 1
Features....................................................................................................................................................................1
Applications.............................................................................................................................................................1
2. Specifications............................................................................................................................................................... 1
Electrical Specifications .......................................................................................................................................... 1
Operating Environment and other Specifications.....................................................................................................2
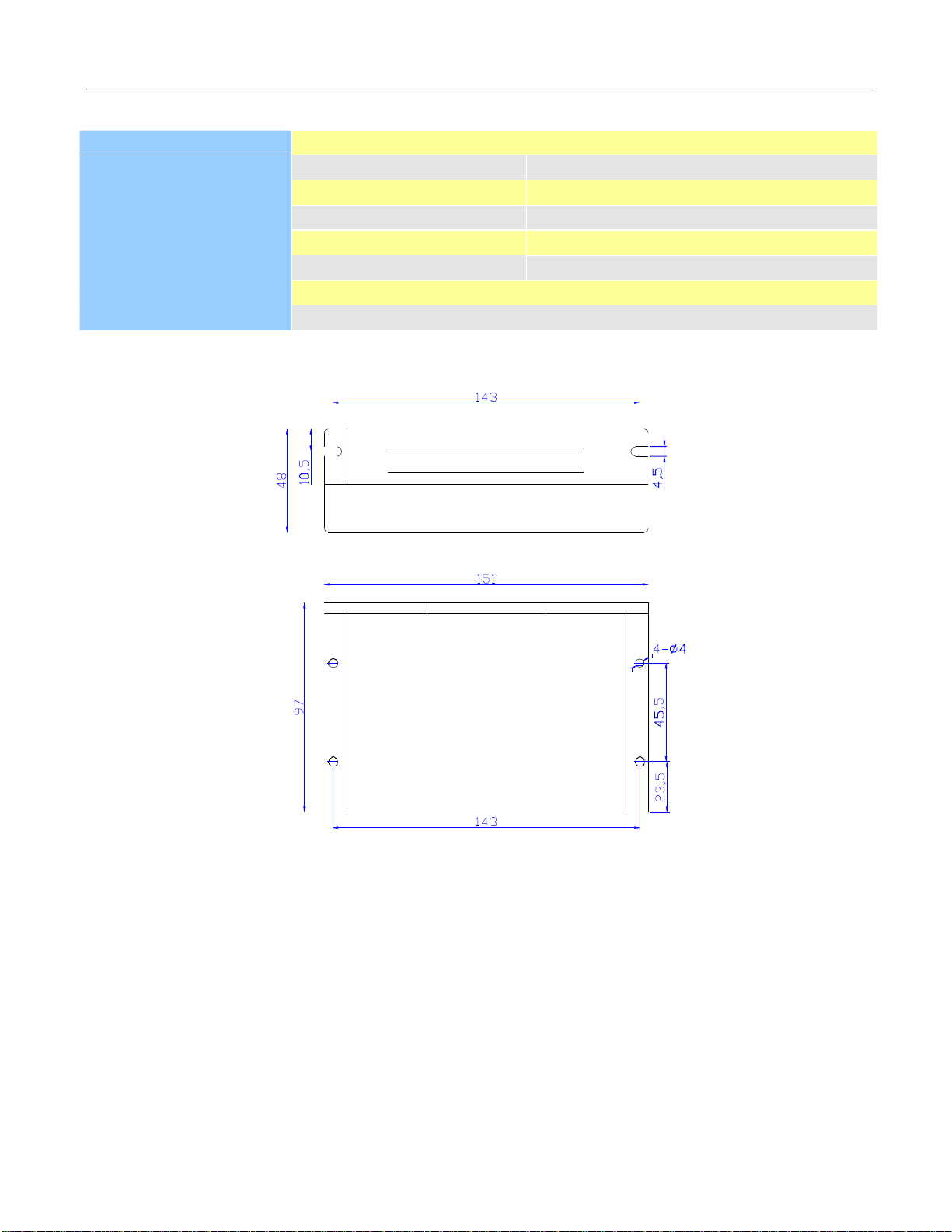
Mechanical Specifications........................................................................................................................................2
Elimination of Heat ................................................................................................................................................. 2
3. Pin Assignment and Description.................................................................................................................................. 3
Connector P1 Configurations................................................................................................................................... 3
Selecting Active Pulse Edge or Active Level and Control Signal Mode...................................................................3
Connector P2 Configurations................................................................................................................................... 4
4. Control Signal Connector (P1) Interface ......................................................................................................................4
5. Connecting the Motor..................................................................................................................................................4
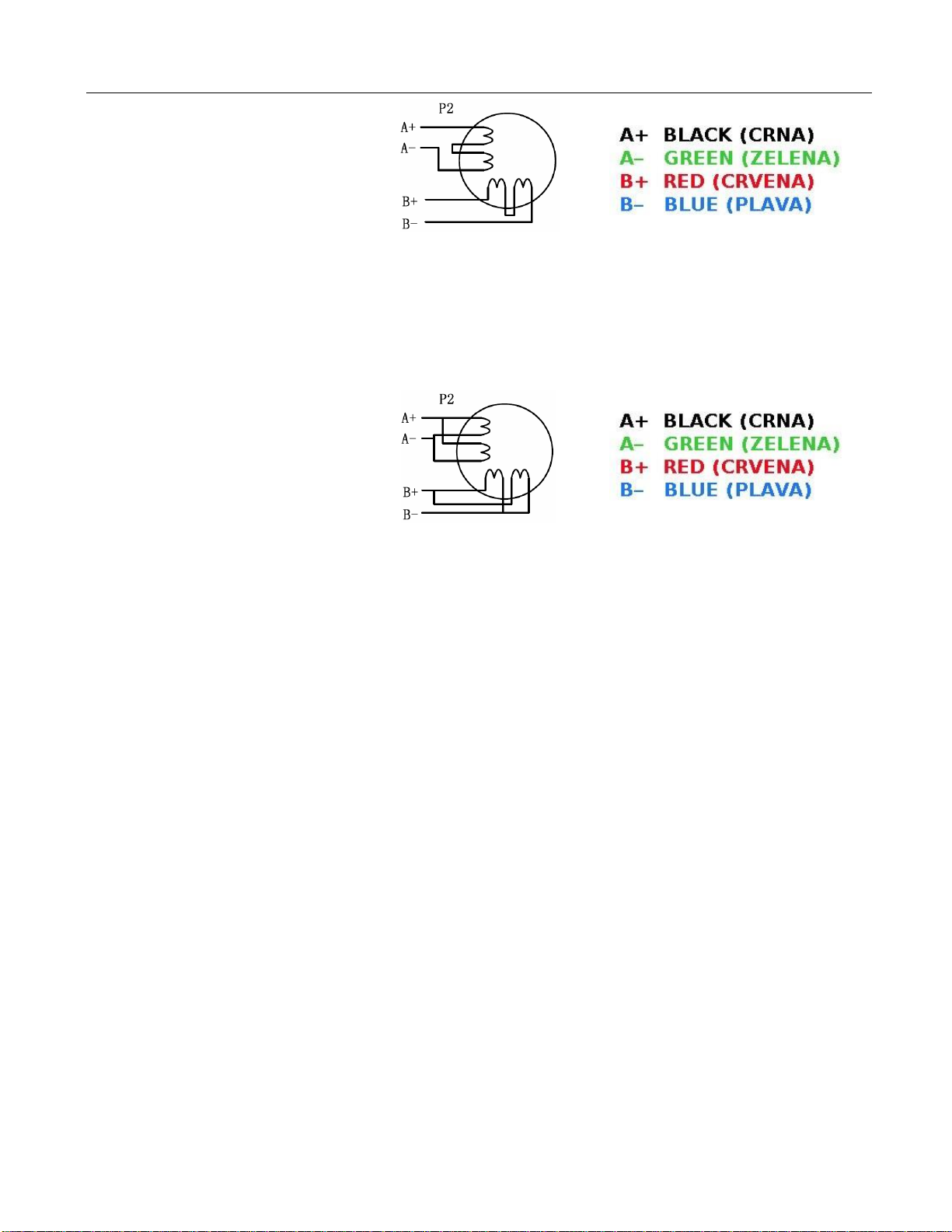
Connections to 4-lead Motors..................................................................................................................................4
Connections to 6-lead Motors..................................................................................................................................5
Half Coil Configurations ................................................................................................................................. 5
Full Coil Configurations...................................................................................................................................5
Connections to 8-lead Motors..................................................................................................................................5
Series Connections........................................................................................................................................... 5
Parallel Connections.........................................................................................................................................6
6. Power Supply Selection...............................................................................................................................................6
Regulated or Unregulated Power Supply................................................................................................................. 6
Multiple Drivers ...................................................................................................................................................... 6
Selecting Supply Voltage. ....................................................................................................................................... 7
7. Selecting Microstep Resolution and Driver Output Current........................................................................................ 7
Microstep Resolution Selection...............................................................................................................................7
Current Settings........................................................................................................................................................7
Dynamic Current Setting..................................................................................................................................8
Standstill Current Setting.................................................................................................................................8
28BAuto Tuning by SW4.........................................................................................................................................8
8. Wiring Notes................................................................................................................................................................ 9
9. Typical Connection...................................................................................................................................................... 9
10. Sequence Chart of Control Signals..........................................................................................................................10
11. Protection Functions.................................................................................................................................................10
12. Frequently Asked Questions.....................................................................................................................................11
Problem Symptoms and Possible Causes ...............................................................................................................11