WATTECO BoB Assistant User manual

REFERENCE MANUAL
Reference: 50-80-001-001 / BoB Assistant EU 868MHz
Contact: support@watteco.fr

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 2
Table of contents
I. Introduction..................................................................................................................................................................5
1.1. Overview ..............................................................................................................................................................5
1.2. Recommended fastening solutions..................................................................................................................6
1.2.1. Magnets –default configuration..............................................................................................................6
1.2.2. Rivet.............................................................................................................................................................7
1.2.3. Screw...........................................................................................................................................................7
1.3. Key Features........................................................................................................................................................8
II. Functional overview.....................................................................................................................................................9
2.1. Life cycle and Operating modes........................................................................................................................9
2.1.1. Functional preview ....................................................................................................................................9
2.1.2. Startup & initialization...............................................................................................................................9
2.1.3. Operating modes.......................................................................................................................................9
2.2. Device Interaction............................................................................................................................................ 14
2.2.1. Device Startup......................................................................................................................................... 14
2.2.2. Device power off..................................................................................................................................... 19
2.2.3. Knowledge data set erase ..................................................................................................................... 20
2.2.4. Battery value reset ................................................................................................................................. 21
2.3. Battery Replacement....................................................................................................................................... 22
2.4. BoB ASSISTANT v2.0 frequency analysis....................................................................................................... 24
2.5. Frame identification header ........................................................................................................................... 25
2.6. Peak frequency value ...................................................................................................................................... 25
2.7. Manufacturing configuration ......................................................................................................................... 26
2.7.1. Device default configuration ................................................................................................................. 26
2.7.2. Labels ....................................................................................................................................................... 26
III. Uplink payloads (Device to LoRaWAN server) ....................................................................................................... 28
3.1. Introduction...................................................................................................................................................... 28
3.2. LEARNING MESSAGE........................................................................................................................................ 28
3.2.1. Payload structure ................................................................................................................................... 28
3.2.2. Learning message payload data extraction example ........................................................................ 29
3.2.3. FFT signal details..................................................................................................................................... 30
3.3. REPORT MESSAGE............................................................................................................................................ 32
3.3.1. Payload structure ................................................................................................................................... 32
3.3.2. Report message payload data extraction example............................................................................ 34
3.4. ALARM MESSAGE ............................................................................................................................................. 35
3.4.1. Payload structure ................................................................................................................................... 35
3.5. STATE MESSAGE ............................................................................................................................................... 36
3.5.1. payload structure ................................................................................................................................... 36
IV. Downlink (LoRa to device)........................................................................................................................................ 37
4.1. Renew learning mode or add learning.......................................................................................................... 37
4.2. Change sampling period................................................................................................................................. 37
4.3. Enable/disable machine start/stop STATE MESSAGE .................................................................................. 37
4.4. Change ALARM MESSAGE threshold ............................................................................................................. 38

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 3
4.5. Reset battery value –New .............................................................................................................................. 38
4.6. Enable/disable frame acknowledgement –New.......................................................................................... 38
4.7. Change Vibration threshold for On/Off detection –New ........................................................................... 39
V. Charts examples ....................................................................................................................................................... 40
5.1. Breakdown of the operating time of the machine ...................................................................................... 40
5.2. Anomaly distribution....................................................................................................................................... 40
5.3. Average unnatural vibration level in reports................................................................................................ 41
5.4. Number of drift notifications ......................................................................................................................... 41
5.5. Temperature .................................................................................................................................................... 41
5.6. Maximum vibration value............................................................................................................................... 42
5.7. Peak Frequency................................................................................................................................................ 42
5.8. Report view....................................................................................................................................................... 43
5.9. Vibration drift Alarm view............................................................................................................................... 44
VI. Payload examples ..................................................................................................................................................... 45
6.1. Raw payload ..................................................................................................................................................... 45
6.2. Frame decode examples................................................................................................................................. 46
6.2.1. LEARNING TYPE....................................................................................................................................... 46
6.2.2. REPORT TYPE........................................................................................................................................... 47
6.2.3. ALARM TYPE ............................................................................................................................................ 48
6.2.4. STATE TYPE .............................................................................................................................................. 49
VII. Frequently Asked questions................................................................................................................................ 50
7.1. Why monitor vibrations and their drift?........................................................................................................ 50
7.2. What are the main causes of vibration anomaly? ....................................................................................... 50
7.3. Which type of equipment is well suited for BoB ASSISTANT? .................................................................... 51
7.4. What is the temperature limit? ...................................................................................................................... 51
7.5. When should BoB ASSISTANT be installed on the equipment? ................................................................. 51
7.6. Can we start BoB ASSISTANT on a machine that is not running? .............................................................. 51
7.7. Can BoB ASSISTANT or the machine be moved without disrupting its operation? ................................. 52
7.8. What is the autonomy of BoB ASSISTANT V2 sensors? ............................................................................... 53
7.9. How to evaluate LoRa coverage? What is the operating limit? .................................................................. 53
7.10. First learning and complete learning, what is the difference? ................................................................... 53
7.11. Bob started his learning but does not complete it. Why?........................................................................... 54
7.12. Why one BoB ASSISTANT is taking more time to complete its learning than another one? .................. 54
7.13. Why is BoB ASSISTANT learning several time in the first week of operation? ......................................... 54
7.14. How to make an additional learning or start BoB ASSISTANT over? ......................................................... 54
7.15. Some data are missing? .................................................................................................................................. 54
7.16. Missing data and operating time ................................................................................................................... 54
7.17. BoB ASSISTANT did not detect any anomalies, however, a failure occurred. What to do about it?...... 55
7.18. What is the difference between alarm and notification?............................................................................ 55
7.19. How to configure a notification trigger threshold?...................................................................................... 55
7.20. Why does the learning progress report indicate a value outside of expected values (20%, 40%...)?.... 55
7.21. Is it possible to check the activity and proper functioning of BoB ASSISTANT on request? ................... 56
7.22. What is the range of BoB ASSISTANT (communication distance) in an industrial environment? .......... 56
7.23. Are the transmitted data secure? .................................................................................................................. 56

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 4
7.24. I started BoB ASSISTANT, but no message arrives on the application...................................................... 56
7.25. How do I position BoB ASSISTANT on my machine? ................................................................................... 56
VIII. Document history................................................................................................................................................. 57

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 5
I. Introduction
1.1. Overview
BoB Assistant is a low power LoRaWANTM compatible vibration and condition monitoring sensor for
indoor and outdoor predictive maintenance industrial applications, coupled with a temperature sensor for
environmental conditions, a push button and an RGB Led for User Interface.
BoB ASSISTANT will measure and analyze vibrations to detect abnormal behaviors of your industrial
machines, with artificial intelligence capable of detecting operating anomalies before a failure occurs.
BoB ASSISTANT’s casing is IP68 (dust and water proof). Edge AI makes it possible to process locally any
vibration that comes from your machine. The amount of data transmitted is then optimized and secured,
guaranteeing BoB ASSISTANT's autonomy for several years!
Very easy to install, BoB ASSISTANT does not require any configuration. Simply put BoB ASSISTANT on
your machine, start it, and after a just few hours of learning, BoB ASSISTANT takes care of your machine!

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 6
1.2. Recommended fastening solutions
1.2.1. Magnets –default configuration
BoB ASSISTANT is delivered with a magnet kit, so you can put your device on your machine out of the
box.
Default configuration:
-Magnet (x2):
oManufacturer: BRUGGER MAGNET
oReference: A22AG-KsM4x6
-Nut (x2):
oManufacturer: BOSSARD
oReference: BN11207 / 3061765
Validated references:
Manufacturer
Reference
Pull Force
(kg)
Size (DxHxL / M)
Comments
BRUGGER
A43AG-KsM4x6
10
43x6x12mm / M4x6
Rubber coated magnet (outdoor
use, max 60°C)
BRUGGER
A22AG-KsM4x6
6
22x6x12.5mm / M4x6.5
Rubber coated magnet (outdoor
use, max 60°C)
ECLIPSE
E1053/NEO
14
20x6x15.5mm/ M4x9.5
Neodymium magnet (indoor
use, max 80°C)
ECLIPSE
E1054/NEO
20
25x7x16.5mm / M5x9.5
Neodymium magnet (indoor use
max 80°C)

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 7
These magnets references have been successfully tested as compliant with ETSI 300-019 class 5.2 when
mounted on BoB ASSISTANT.
Class 5.2: all types of road vehicles used in areas with a well-developed road system, except tracked
vehicles, motorcycles, scooters and other vehicles with low mass. The equipment can be mounted on
surfaces which may be subjected to flying stones. The equipment may be mounted on passenger car
instrument panels to which high frequency vibrations from the engine, or from other parts connected to
the engine, may be transmitted. This class also applies to fork lift trucks and trains with soft suspension and
shock reducing buffers
1.2.2. Rivet
Rivet properties: Ø4mm, length 7/10.2/13.3mm
Drilling: Ø4.1mm / Ø4.2mm
Manufacturer
Reference
Comments
BOSSARD
BN 84545 / 8031215
Ring washer
BOSSARD
BN 1409 / 3206579
Rivet
1.2.3. Screw
Manufacturer
Reference
Comments
BENE INOX
211309
TF TORX 4x45mm wood screw
WURTH
0455000304
Cup washer

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 8
1.3. Key Features
Radio:
Maximum transmission power 25mW in the band
868.0 to 868.6MHz
LoRa SF6-SF12
LoRa 1.0 Class A
LoRa Sensitivity: -137 dBm
Temperature range:
Storage: -25°C to +55°C
Use: -20°C to +55°C
RGB LED:
Network availability,
Learning stage,
Vibration status,
Learning restored,
Learning erased,
Battery reset
Sensor:
3-Axis Accelerometer
Temperature measurement
Vibrations measurement 0Hz-12800 Hz
Adjustable periodic sampling
Firmware:
Automatic learning process and reporting by
embedded artificial intelligence.
Possibility to add new learning or to reset learning.
AES-128 Encrypted data
Power supply:
Battery, 3,5 years (normal use)
Case:
Polyamide case
Dimensions: 76 x 79 x 23 mm
Weight: 75 grams
IP68 Protection
Tests and Certifications:
CE marking, qualified for industrial use in
accordance with
EN 61000-6-2.
ETSI EN 300 019:
Storage Class 1.2 Part 1.1
Transport Class 2.3 Part 1.2
Use Class 5.2 Part 1.5

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 9
II. Functional overview
2.1. Life cycle and Operating modes
2.1.1. Functional preview
The following figure presents the different modes of operation of the device:
2.1.2. Startup & initialization
The first step when you install BoB ASSISTANT on a machine you want to monitor will be to start the
device, and make sure that:
othe LoRaWANTM Network is reachable
othe vibration level of the machine is high enough to start learning
See §2.2.1 Device Startup for more details.
When the Startup & initialization mode is over, BoB ASSISTANT will then have 2 operating modes :
oLearning and Reporting
oMonitoring and Alerting
2.1.3. Operating modes
2.1.3.1. Learning and reporting
This mode will last for 7 days, and will allow BoB ASSISTANT to learn the machine cycle(s). BoB ASSISTANT
will start by a first learning session, and will then start reporting machine activity. Each time a new vibration
signature is detected, BoB will start another learning session, in parrallel with the reporting mode.
Startup &
initialization
~a few minutes
•Check for
LoRaWANTM
Network availability
•Check if there is
Knowledge data in
flash
•Check for vibration
level
•Send "Device ON"
state message at the
end of the mode
Learning and
reporting
~7 days
•Learn any new
vibration signature
•Warn about learning
session(s) progress
•Send periodic report
on machine health
(drift percentage,
operating time,
anomaly prediction)
•Send machine state
(On/Off)
•Receive potential
Downlink commands
Monitoring
•Send Alarm messages
whenever the drift
threshold is crossed
(25% drift by default)
•Send periodic report
on machine health
(drift percentage,
operating time,
anomaly prediction)
•Send machine state
(On/Off)
•Receive potential
Downlink commands
Power off /
Battery
Swap / EOL
•Get to poweroff
mode
•Battery swap
•If End of life =>
device recycling
First
learning
session
Reporting Learning
session Reporting Learning
session Reporting Monitoring
mode
New Vibration
signature
New Vibration
signature
7 days
Will be skipped if
existing knowledge data
is in flash at startup

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 10
2.1.3.1.1. First learning session
Once BoB ASSISTANT is started, it will enter a first Learning session, which will last for a few hours (~1 to
4 hours for a machine with a simple vibration cycle, e.g. Air Conditionning unit).
This learning session will create a first dataset for the embedded AI algortihms and store the
“screenshots” of the corresponding vibration signatures.
For each measure, it will perform a Fast Fourrier Transform (FFT):
It will then add each new signal information to the vibration signature dataset.
For example, after a few hours of operation, the dataset could have more than 30 “screenshots” for the
vibration signature of the machine:
In the first seven days of operation, BoB ASSISTANT will continue monitoring new vibration signatures,
and add them to the dataset.
After this period of time, no new vibration signature will be added to the dataset, unless it is required
through a Downlink command (see §IV Downlink (LoRa to device)).
During a learning session, BoB ASSISTANT will wake up every 60 seconds (default value, configurable,
see §4.2 Change sampling period) to sample the signal, perform the FFT of the vibration signature and
compare and record the sampling to the dataset. BoB ASSISTANT’s dataset is able to record up to 20
different vibration signature zones.
Not to scale
Sleep
mode
wake-up
and
sample
signal
FFT
calculation
Vibration
screenshot
compare
and record
Device processing activity during learning sessions
time
Learning sampling period =
60 seconds
=

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 11
Please be advised:
oif the vibration level was high enough at startup, but then is going below the minimum level of
detection in the first 7 days, the device might get stuck in a Learning session. In this case, we advise
to change BoB location on the machine to put it as close as possible to the vibration source, or on
a less vibration-insulated element.
oIf a new machine cycle appears after the first seven days (e.g. production rate increase), it might
be considered by BoB ASSISTANT as an anomaly. In this case, you will have to send a Downlink
command to BoB ASSISTANT in order to add this cycle to the dataset.
During the Learning session, the device will send messages to keep you posted on the learning
percentage (0 to 100%), for example:
Not to scale
Each message will send details on the progress percentage of the learning session (most of the time 5
messages from 0 to 100, with a 20% step), environmental information (temperature, vibration level, peak
frequency), and a screenshot of the FFT (see §3.2.1 Payload structure)
2.1.3.1.2. Reporting
After the first Learning session, BoB ASSISTANT will switch to the reporting mode, where it will analyze
the machine vibration every 10 minutes:
Not to scale
BoB ASSISTANT will process each sample to define whether a new learning session is needed, or to
prepare a report of the activity sent in periodic reports (every 3 hours, not configurable) concerning the
health of the machine during this period, regarding:
•the operation time of the machine,
•its vibration level,
•the vibration drift percentage,
•and prediction on potential failure distance in time, based on the vibration analysis of the last 24
hours, the last 30 days, and the last 6 months
See §3.3.1 Payload structure for more details on report messages content.
Not to scale
Device activity during reporting
time
Report sampling period =
10 minutes
Device communication activity during Learning sessions
time
0
1
2
3
4
5
Device communication activity during reporting
time
Reporting period = 3 hours
Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 12
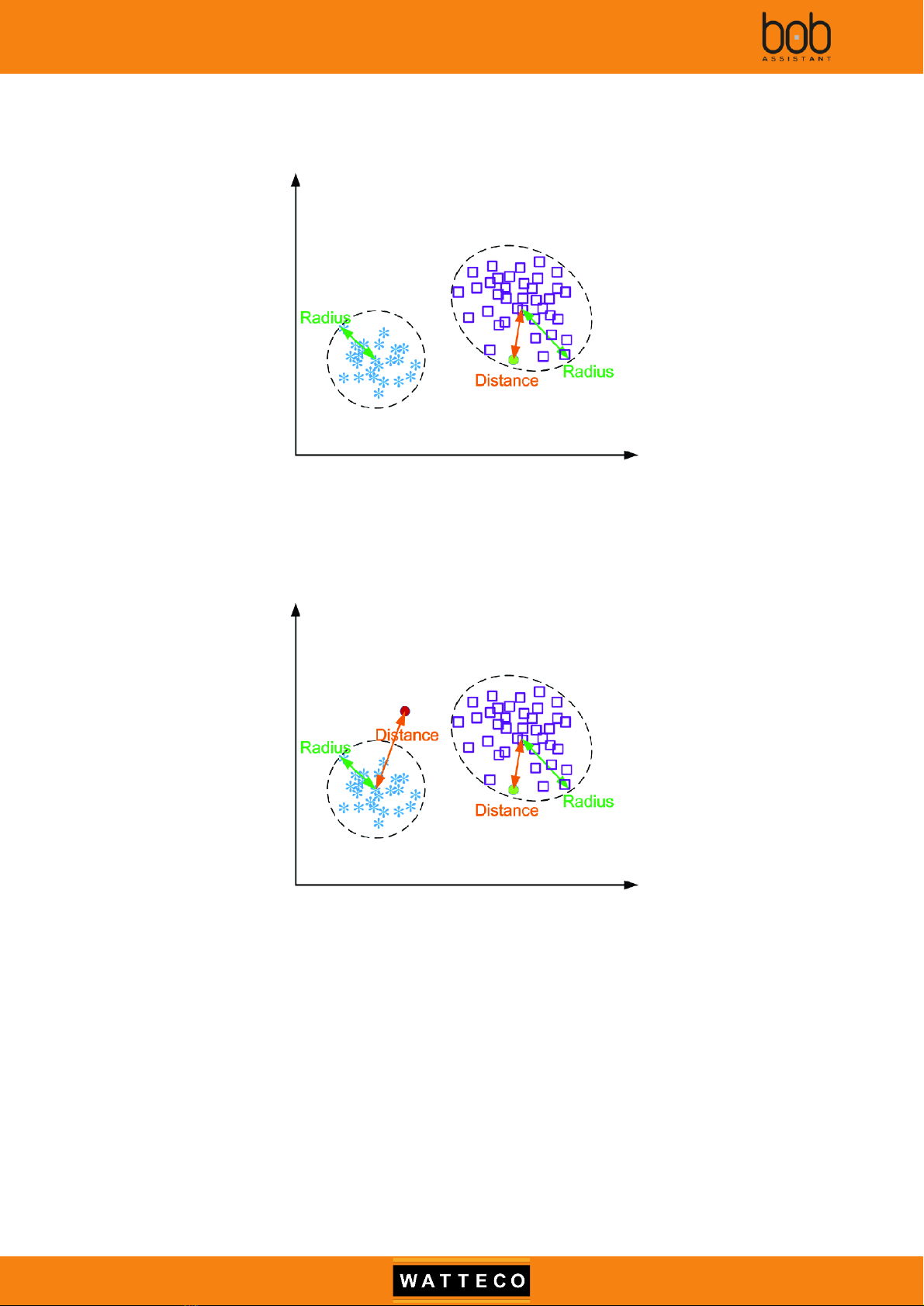
2.1.3.1.3. End of learning mode
At the end of the learning mode (7 days), BoB ASSISTANT will have completed its dataset.
For example, BoB ASSISTANT could have the following dataset, with two distinct vibration cycles with
their respective standard deviation from average point (radius)
2.1.3.2. Monitoring
After the learning mode, BoB ASSISTANT will switch to Monitoring mode, where it will continue its
reporting activity, and will start sending alarms if the drift in the vibration signature pass a defined threshold
(default value is 25% drift).
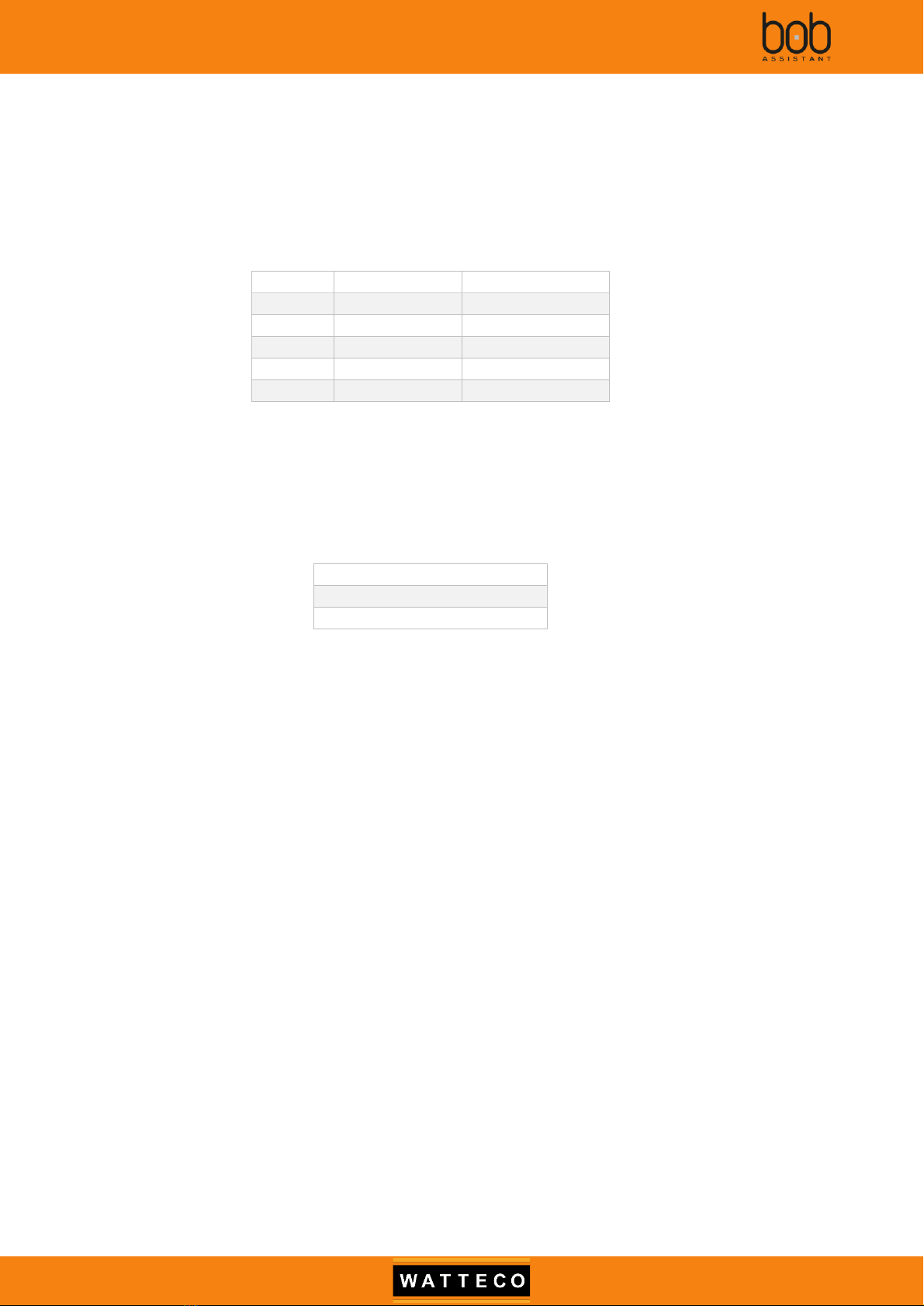
For each signal sampling (every 10 minutes by default), BoB ASSISTANT will process the sampled signal,
and compare it to its dataset:
For the green sample, the distance/drift of the point compared with the average point is within the
defined threshold (default drift percentage threshold is 25%). In this case, BoB will add the recorded data
to prepare the periodic report
For the red sample, the distance/drift of the point compared with the average point is beyond the
defined threshold. In this case, BoB will send an ALARM MESSAGE. The drift percentage triggering an ALARM
MESSAGE can be customized, see §4.4 Change ALARM MESSAGE threshold.
The alarm message can then trigger an e-mail/SMS alert at the platform level (cloud or on premise),
which will be sent to maintenance teams for machine inspection.
Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 13
2.1.3.3. Configurable parameters
Some parameters of BoB ASSISTANT can be tuned to adapt to the equipment operation. For more
information on how to change the parameters see §IV Downlink (LoRa to device)
2.1.3.3.1. Sampling period
BoB ASSISTANT will periodically wake up to sample the vibration signal of the machine (sampling
duration = 0.25s). By default, it will wake up every 60 seconds during the learning and reporting mode (first
7 days), and will then wake up every 10 minutes during the monitoring mode.
Some machines could need to have some different settings, e.g. machines with short operating cycles.
Mode
Learning period
Monitoring Period
Very Fast
10 sec
20 sec
Fast
20 sec
2 min
Legacy
60 sec
5 min
Default
60 sec
10 min
Slow
2 min
10 min
Please be advised: setting BoB ASSISTANT in Fast or Very Fast mode will have consequences on the
device lifespan.
2.1.3.3.2. State messages
BoB ASSISTANT will send machine status when it detects that the machine is turning ON or OFF, based
on sample results. These messages are enabled by default, they can also be disabled.
State message parameters
Enable State Message (default)
Disable State Message
Please be advised: for machines with very short cycles, it is recommended to disable the state
messages, as it could have dramatic effect on the device lifespan, see Downlink section : §4.3
Enable/disable machine start/stop STATE MESSAGE.
2.1.3.3.3. Battery reset
It is possible to reset the battery consumption counter after battery replacement on the device by
sending a specific downlink to the device.
It is also possible to reset the battery consumption counter using the button, see §2.3 Battery
Replacement for more details.
2.1.3.3.4. Vibration threshold management
In some cases, the environment of the equipment is prone to vibration parazites (e.g. 2 large motors
close to each other). In that case, BoB could sense parasitic vibrations, which could corrupt the report data
or even alarm data.
It is possible to change the vibration threshold to consider whether the machine is working or not and
so prevent from getting irrelevant data.
See §4.7 Change Vibration threshold for On/Off detection –New

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 14
2.2. Device Interaction
2.2.1. Device Startup
2.2.1.1. Turning BoB ASSISTANT ON
BoB ASSISTANT is OFF by default when delivered.
In order to start BoB ASSISTANT, you need to:
•Place BoB ASSISTANT on the machine you want to monitor(see §1.2 Recommended fastening
solutions), and make sure that the machine is running. It is best to install BoB on a new
equipment, or a machine, which has just been reviewed by maintenance.
•Turn the device ON by pushing on the button for more than 3 seconds, the LED will then get to
green , followed by 2 green blinks if hardware test is ok.
When the Led first turns green, you can release the button, the device is ON
2.2.1.2. Startup and trouble shooting
2.2.1.2.1. Startup
Once switched ON, BoB ASSISTANT starts its initialization mode. It will first verify if there is knowledge
data stored in flash memory, which needs to be restored. If there is knowledge data in flash, it will then
display the restore sequence LED: .
It then tries to reach the LoRaWANTM Network using OTAA (Over The Air Activation) and ensures that the
perceived vibration level is sufficient (>0.01g). During this mode, the LED is continuously blue ( ).
The initialization mode lasts for around 90 seconds (depending on LoRaWANTM Network coverage)
A the end of this initialization mode, if the device has reached the LoRaWANTM Network, and the
perceived vibration level of the machine is sufficient (>0,01g), then the device will blink 5 times in green
, the LED will stay OFF and BoB ASSISTANT is ready to start its duty and enter the Learning
mode (see §2.1.3.1 Learning)
BoB ASSISTANT will then send a state message to warn that the device has started and everyting is OK
(see §3.5 STATE MESSAGE
payload structure)

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 15
The following figure displays the different steps of the startup, if everything is OK, and there is no
knowledge restored:
Turn BoB ASSISTANT ON
(green + 2 green LED
blinks)
→3s later
Startup and initialization
(Continuous Cyan LED)
→up to ~1minute and 35 seconds
End of initialization
(5 green LED blinks)

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 16
The following figure displays the different steps of the startup, if everything is OK, and there is
knowledge restored:
Turn BoB ASSISTANT ON
(green + 2 green LED
blinks)
→3s later
Knowledge presence to
restore (5 pink LED
blinks)
Startup and initialization
(Continuous Cyan LED)
→up to ~1minute and 35 seconds
End of initialization
(5 green LED blinks)

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 17
2.2.1.2.2. Startup flowchart
Button pushed
for 2s ?
Poweroff
Yes
No
Start Join Network
sequence
Network
joined ?
Max retry (8)
reached ?
Increment retry counter
Max join
sequence(3)
reached ?
Increment join sequence
counter
Sleep for 24h
Start Vibration testing
sequence
Vibration
OK ?
Max retry (3)
reached ?
Max vibration
sequence(3)
reached ?
Increment vibration
sequence counter
Increment vibration test
retry counter + sleep for 5
minutes
Sleep for 24h
Yes
No
Yes
Display LoRa error LED
sequence
No
No
Yes
Yes
No
No
Yes
Yes
No
Vibration error LED
sequence
No
Yes
Startup LED sequence
Yes
Knowledge in
flash?
Yes
Restore knowledge data
No
Display knowledge restore
LED sequence
Knowledge
Restored?
Display
Startup LED
Continuous
Cyan
Hardware self
test OK?
Display Hardware test OK
LED sequence
Display Init LED
Yes
No

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 18
2.2.1.2.3. Troubleshooting
Please be advised: If the LoRaWANTM Network was unreachable or if the vibration level is below the
minimum level, the device will not start its duty, but will go back to deep sleep mode. To restart the
device, follow §2.2.1.1 Turning BoB ASSISTANT ON
The following table summarizes the different sequences displayed by the LED, depending on the origin
of the problem:
Origin of the problem
Corresponding LED sequence on BoB
ASSISTANT
Problem solving
LoRaWANTM Network
unreachable
10x
- Check device declaration on the
LoRaWANTM Network Server (NS),
make sure that DEV_EUI, APP_EUI
and APP_Key are all correctly
declared on the NS.
If you did not receive the keys for
your device, please contact us.
- Check Network coverage on the
BoB ASSISTANT installation location.
If BoB ASSISTANT is out of range, you
can either add a gateway if you run
your own network, or contact your
operator to check for solutions
Vibration level below
the minimum level
10x
Change BoB ASSISTANT location on
the machine, and try to put it as
close as possible to the vibration
source, or on a less vibration-
insulated element.
BoB ASSISTANT perceives vibrations
of very low amplitude (minimum
0.01g), there is surely a suitable
place!
Hardware problem
10x
In this case, BoB ASSISTANT must be
replaced and we invite you to
contact our support team

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 19
2.2.2. Device power off
In case you need to stop BoB ASSISTANT (e.g. maintenance operation), it is possible to turn BoB
ASSISTANT off, without loosing the data set (knowledge) learnt during the first 7 days.
To do so, push the button for ~10s, after you get the green/orange/red sequence on the LED. Once the
LED is red, you can release the button, the device will go off after sending a STATE message.
Turn BoB ASSISTANT OFF
(green->orange->red)
→Press the button for ~1s
→Press the button for ~4s
→Press the button for ~10s
Release the button when the LED is red
BoB ASSISTANT will then send the STATE message to warn that it gets Off (can
take up to 10 minutes)
Once the STATE message is sent, the LED will show the following
sequence:
To turn BoB Assistant back on, follow the steps described in §2.2.1.1 Turning BoB ASSISTANT ON

Bob Assistant - Reference Manual
2023-04-04 - Version 1.0 20
2.2.3. Knowledge data set erase
In case you want to reset BoB ASSISTANT knowledge, it is possible to use the button to do so.
Pushing the button for more than 20s, will display the “poweroff” green/orange/red sequence on the
LED, followed by pink Led after 20s. Once the LED is pink, you can release the button, the device will erase
the knowledge data stored in flash, and go off after sending a STATE message.
Turn BoB ASSISTANT OFF
(green->orange->red)
→Press the button for ~1s
→Press the button for ~4s
→Press the button for ~10s
→Press the button for more than 20s
Release the button when the LED is pink
The device will then display 5x sequence
BoB ASSISTANT will then send the STATE message to warn that it erased the
knowledge data and gets Off (can take up to 10 minutes)
Other manuals for BoB Assistant
1
Table of contents
Other WATTECO Accessories manuals





Popular Accessories manuals by other brands













BEANAIR
BEANAIR BeanDevice Wilow AX-3D quick start

Pyxis
Pyxis ST-565 instruction manual

EVOline
EVOline FrameDock Customer's operating and assembly instructions

inventum
inventum HNL4111L instruction manual

Compressed Air Alliance
Compressed Air Alliance K Series user manual

ORION TELESCOPES & BINOCULARS
ORION TELESCOPES & BINOCULARS 07790 instruction manual