Table of Contents
1. Safety .................................................................................................................................................4
1.1 Safety Symbols.................................................................................................................................................. 4
1.2 Safety Guide....................................................................................................................................................... 4
2. Introduction ......................................................................................................................................6
2.1 System Features................................................................................................................................................ 6
2.2 Transmitter Overview...................................................................................................................................... 7
2.2.1 Transmitter Antenna.............................................................................................................................. 7
2.2.2 Wheel and Trigger ................................................................................................................................. 7
2.2.3 Status Indicator....................................................................................................................................... 8
2.2.4 Trims ........................................................................................................................................................... 8
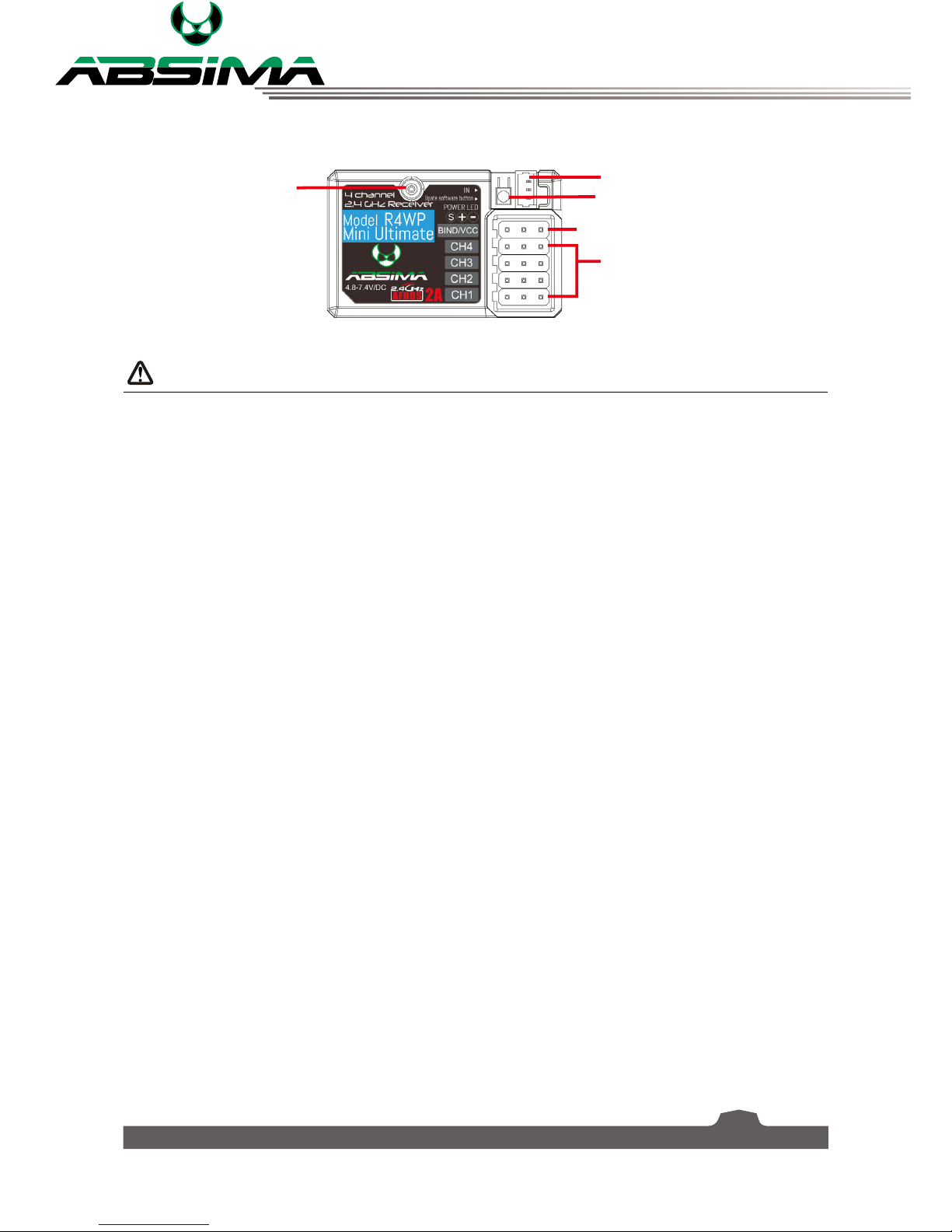
2.3 Receiver Overview .......................................................................................................................................... 9
2.3.1 Receiver Antenna ................................................................................................................................... 9
2.3.2 Status Indicator...................................................................................................................................... 9
2.3.3 Connectors ............................................................................................................................................... 9
2.3.4 USB Simulator Mode ............................................................................................................................ 9
3. Getting Started ...............................................................................................................................10
3.1 Transmitter Battery Installation.................................................................................................................10
3.2 Connecting the Receiver and Servos .....................................................................................................11
4. Operation Instructions...................................................................................................................12
4.1 Power On ..........................................................................................................................................................12
4.2 Binding...............................................................................................................................................................12
4.3 Pre-use Check .................................................................................................................................................12
4.4 Adjusting Wheel Position............................................................................................................................13
4.5 Trims ...................................................................................................................................................................13
4.6 Power Off..........................................................................................................................................................13
5. Home Screen...................................................................................................................................14
6. Function Settings............................................................................................................................15
6.1 Reverse Function............................................................................................................................................15
6.2 End Points Function ......................................................................................................................................15
6.3 Subtrim Function............................................................................................................................................16
6.4 Steering Exponential.....................................................................................................................................17
6.5 Steering Speed................................................................................................................................................18
6.6 Steering Mix.....................................................................................................................................................18
6.7 Throttle Neutral..............................................................................................................................................19
6.8 Throttle Exponential......................................................................................................................................19
6.9 Throttle Curve .................................................................................................................................................20
6.10 A.B.S. ................................................................................................................................................................20
6.11 Throttle Speed..............................................................................................................................................22
6.12 Throttle Middle.............................................................................................................................................22
6.13 Throttle Idel Up............................................................................................................................................23
6.14 Engine Cut......................................................................................................................................................23
6.15 Boat Mode .....................................................................................................................................................24
6.16 Brake Mixing..................................................................................................................................................24