TITAN-SVX Operation Manual page 3 Rev 4.05
Table of Contents
1. INTRODUCTION ........................................................................................................................................ 5
1.1. TECHNICAL FEATURES ....................................................................................................................................6
2. GENERAL OPERATION OVERVIEW ........................................................................................................ 7
2.1. PULSE MODE.....................................................................................................................................................7
2.2. CONTROL MODE...............................................................................................................................................8
2.2.1. Position Value .............................................................................................................................................. 8
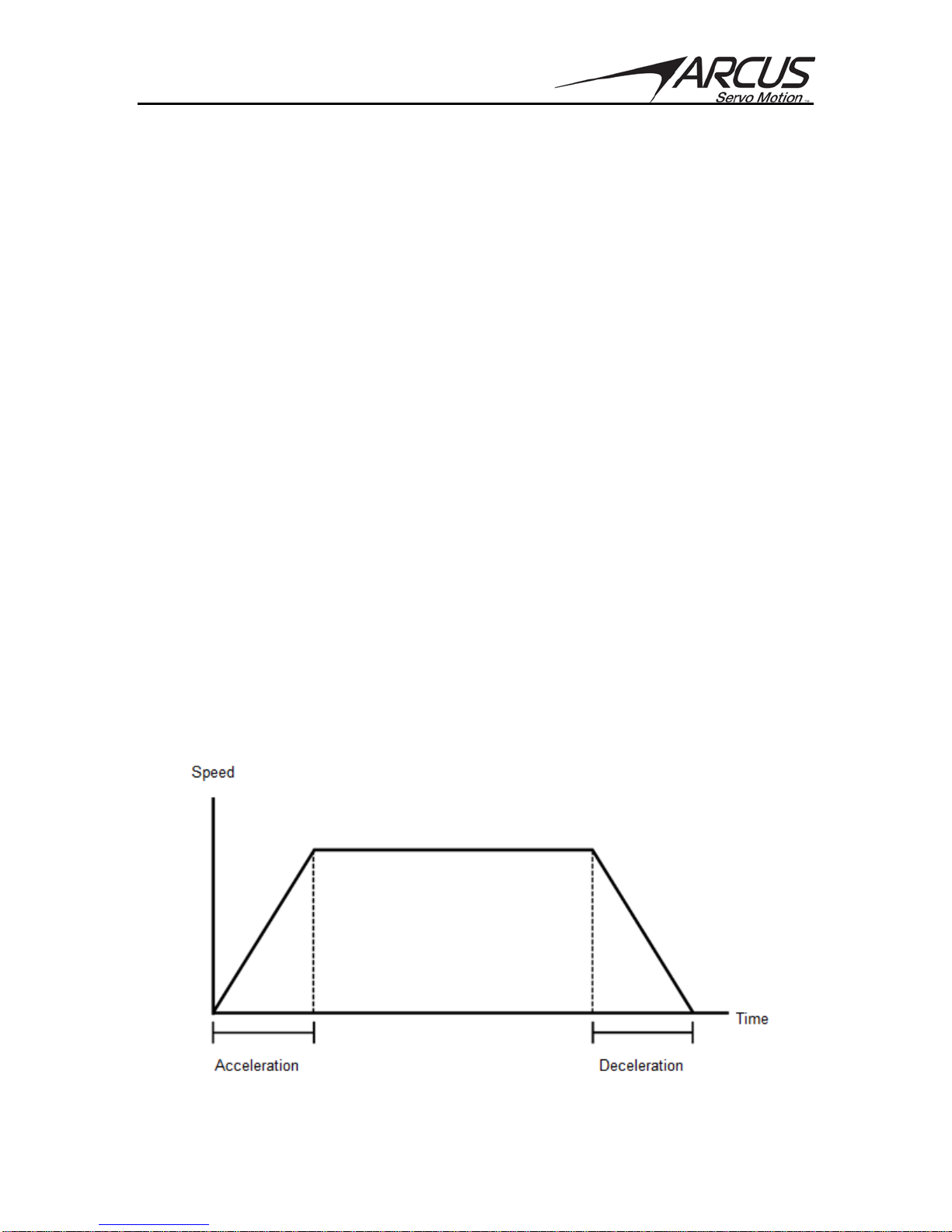
2.2.2. Motion Profile .............................................................................................................................................. 8
2.2.3. Homing............................................................................................................................................................ 9
2.2.4. Limits .............................................................................................................................................................11
2.3. MOTOR POWER .............................................................................................................................................11
2.4. JOG MOVE .......................................................................................................................................................11
2.5. STOPPING ....................................................................................................................................................... 12
2.6. POSITIONAL MOVES......................................................................................................................................12
2.7. MOTOR STATUS............................................................................................................................................. 12
2.8. FAULT STATUS............................................................................................................................................... 12
2.9. DIGITAL INPUTS /OUTPUTS .......................................................................................................................13
2.10. ANALOG INPUTS ......................................................................................................................................... 14
2.11. JOYSTICK CONTROL .................................................................................................................................... 14
2.12. CLOSED LOOP CONTROL GAINS ............................................................................................................... 15
2.12.1. P-Gain..........................................................................................................................................................15
2.12.2. V-Gain..........................................................................................................................................................15
2.12.3. I-Gain...........................................................................................................................................................15
2.12.4. C-Gain..........................................................................................................................................................15
2.13. DYNAMIC GAINS ......................................................................................................................................... 15
2.14. FORCE CONTROL ........................................................................................................................................ 16
2.15. STANDALONE PROGRAM SPECIFICATION ............................................................................................... 18
2.15.1. Standalone Program Specification ...............................................................................................19
2.15.2. Multi-thread / multi-tasking............................................................................................................19
2.15.3. Standalone Subroutines .....................................................................................................................19
2.15.4. Standalone Variables...........................................................................................................................19
2.15.5. Math Operations....................................................................................................................................20
2.15.6. Standalone Run On Boot-Up.............................................................................................................20
2.15.7. Storing Standalone Program to Flash.........................................................................................20
2.15.8. Standalone Command Set..................................................................................................................21
2.15.9. Conditional Statements ......................................................................................................................24
2.15.10. Example Standalone Programs....................................................................................................25
3. SERIAL COMMUNICATING COMMANDS................................................................................................29
3.1. STATUS COMMANDS ..................................................................................................................................... 29
3.2. LED COMMANDS........................................................................................................................................... 29
3.3. MOTION COMMANDS.................................................................................................................................... 30
3.4. GAIN COMMANDS.......................................................................................................................................... 30
3.5. STANDALONE PROGRAM COMMANDS ....................................................................................................... 31
3.6. LIMIT COMMANDS......................................................................................................................................... 31
3.7. DIGITAL IO COMMANDS............................................................................................................................... 32
3.8. VARIABLE COMMANDS................................................................................................................................. 32
3.9. COMMUNICATION COMMANDS ................................................................................................................... 32