Macro Functions Guide Key
The table below should be used as a key on the following pages.
Function Explanation
STOP Latched Input, Open the contact to STOP the drive
RUN Latched input, Close the contact to Start, the drive will operate as long as the input is maintained
FWDLatched Input, selects the direction of motor rotation FORWARD
REVLatched Input, selects the direction of motor rotation REVERSE
RUN FWDLatched Input, Close to Run in the FORWARD direction, Open to STOP
RUN REVLatched Input, Close to Run in the REVERSE direction, Open to STOP
ENABLE Hardware Enable Input.
In Keypad Mode, P-31 determines whether the drive immediately starts, or the keypad start key must be
pressed.
In other modes, this input must be present before the start command is applied via the fieldbus interface.
STARTNormally Open, Rising Edge, Close momentarily to START the drive (NC STOP Input must be maintained)
^- START -^ Simultaneously applying both inputs momentarily will START the drive (NC STOP Input must be maintained)
STOPNormally Closed, Falling Edge, Open momentarily to STOP the drive
STARTFWDNormally Open, Rising Edge, Close momentarily to START the drive in the forward direction (NC STOP
Input must be maintained)
STARTREVNormally Open, Rising Edge, Close momentarily to START the drive in the reverse direction (NC STOP
Input must be maintained)
^-FAST STOP (P-24)-^
When both inputs are momentarily active simultaneously, the drive stops using Fast Stop Ramp Time P-24
FAST STOP(P-24)
Normally Closed, Falling Edge, Open momentarily to FAST STOP the drive using Fast Stop Ramp Time
P-24
E-TRIP Normally Closed, External Trip input. When the input opens momentarily, the drive trips showing
or depending on P-47 setting
Fire Mode Activates Fire Mode
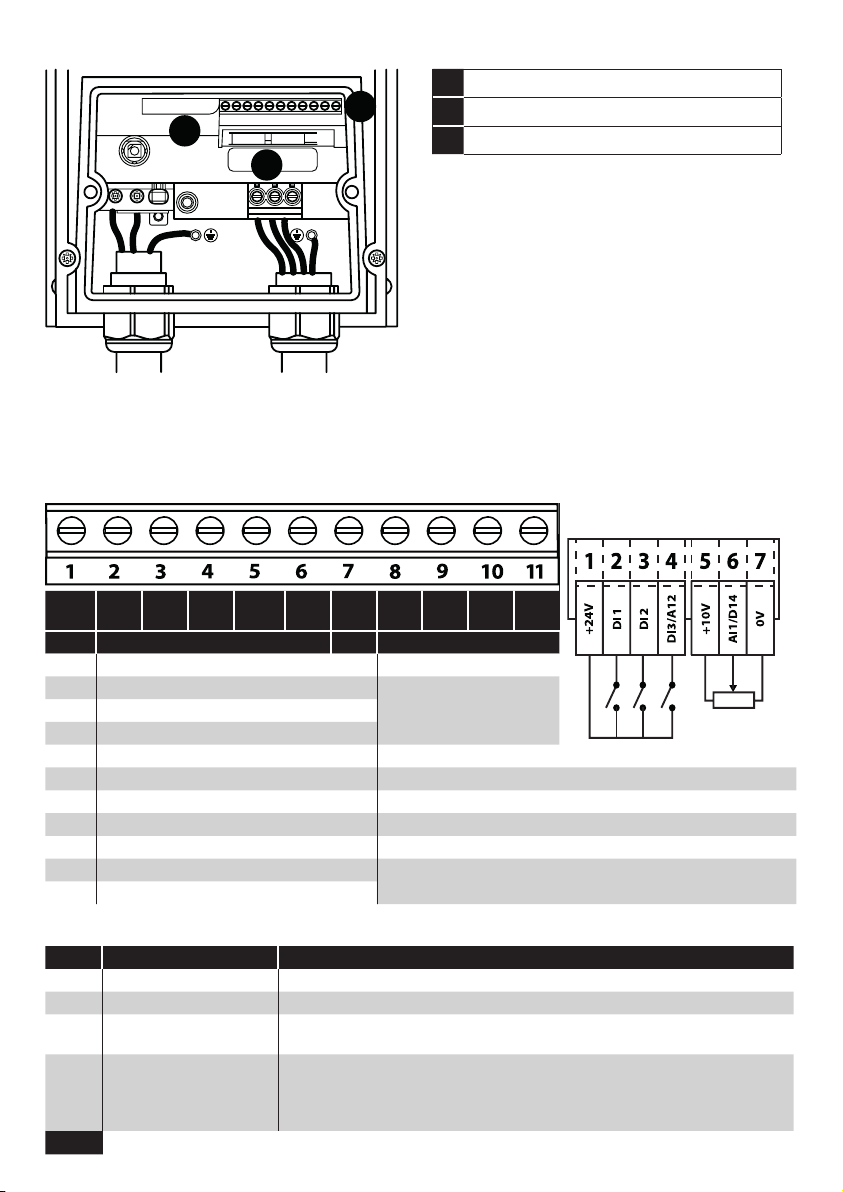
Analog Input AI1 Analog Input 1, signal format selected using P-16
Analog Input AI2 Analog Input 2, signal format selected using P-47
AI1 REF Analog Input 1 provides the speed reference
AI2 REF Analog Input 2 provides the speed reference
P-xx REF Speed reference from the selected preset speed
PR-REF Preset speeds P-20 – P-23 are used for the speed reference, selected according to other digital input
status
PI-REF PI Control Speed Reference
PI FB Analog Input used to provide a Feedback signal to the internal PI controller
KPD REF Keypad Speed Reference selected
FB REF Selected speed reference from Fieldbus (Modbus RTU / CAN Open / Master depending on P-12
setting)
(NO) Input is Normally Open, Close momentarily to activate the function
(NC) Input is Normally Closed, Open momentarily to activate the function
INC SPDNormally Open, Rising Edge, Close momentarily to increase the motor speed by value in P-20
DEC SPD
Normally Open, Rising Edge, Close momentarily to decrease the motor speed by value in P-20