BlueBox IDTRONIC HF User manual

BLUEBOX Gen.2 HFM Page 1 of 37
HF
RFID System
BLUEBOX GEN 2
HF MR
COMMUNICATION PROTOCOL
Profibus

BLUEBOX Gen.2 HFM Page 2 of 37
Preface
iDTRONIC GmbH (IDTRONIC) reserves the right to make changes to its
products or services or to discontinue any product or service at any time
without notice. IDTRONIC provides customer assistance in various technical
areas, but does not have full access to data concerning the use and
applications of customer's products. Therefore, IDTRONIC assumes no liability
and is not responsible for customer applications or product or software design
or performance relating to systems or applications incorporating IDTRONIC
products. In addition, IDTRONIC assumes no liability and is not responsible for
infringement of patents and/or any other intellectual or industrial property
rights of third parties, which may result from assistance provided by
IDTRONIC. IDTRONIC products are not designed, intended, authorized or
warranted to be suitable for life support applications or any other life critical
applications that could involve potential risk of death, personal injury or severe
property or environmental damage. With the edition of this document, all
previous editions become void. Indications made in this manual may be
changed without previous notice. Composition of the information in this
manual has been done to the best of our knowledge. IDTRONIC does not
guarantee the correctness and completeness of the details given in this manual
and may not be held liable for damages ensuing from incorrect or incomplete
information. Since, despite all our efforts, errors may not be completely
avoided, we are always grateful for your useful tips. The installation
instructions given in this manual are based on advantageous boundary
conditions. IDTRONIC does not give any guarantee promise for perfect function
in cross environments. The companies or products mentioned in this document
might be brands or brand names of the different suppliers or their subsidiaries
in any country. This document may be downloaded onto a computer, stored
and duplicated as necessary to support the use of the related IDTRONIC
products. Any other type of duplication, circulation or storage on data carriers
in any manner not authorized by IDTRONIC represents a violation of the
applicable copyright laws and shall be prosecuted.
Safety Instructions / Warning - Read before start-up!
•The device may only be used for the intended purpose designed by the
manufacturer. The operation manual should be conveniently kept available
at all times for each user.
•Unauthorized changes and the use of spare parts and additional devices that
have not been sold or recommended by the manufacturer may cause fire,
electric shocks or injuries. Such unauthorized measures shall exclude any
liability by the manufacturer.
•The liability-prescriptions of the manufacturer in the issue valid at the time
of purchase are valid for the device. The manufacturer shall not be held
legally responsible for inaccuracies, errors, or omissions in the manual or
automatically set parameters for a device or for an incorrect application of a
device.

BLUEBOX Gen.2 HFM Page 3 of 37
•Repairs may be executed by the manufacturer only.
•Only qualified personnel should carry out installation, operation, and
maintenance procedures.
•Use of the device and its installation must be in accordance with national
legal requirements and local electrical codes.
•When working on devices the valid safety regulations must be observed.
Reference table of the devices object of this manual:
Code Communication
Interface Antenna
5233HM Profibus One External Channel

BLUEBOX Gen.2 HFM Page 4 of 37
Table of Contents
Preface .................................................................................................. 2
1Introduction...................................................................................... 5
2Operating Features............................................................................ 7
3Communication Features .................................................................... 9
3.1 Introduction ................................................................................ 9
3.2 Device Reset ..............................................................................13
3.3 Device Serial Number Reading......................................................14
3.4 FW Version Reading ....................................................................14
3.5 Temperature Reading ..................................................................15
3.6 Date/Time Reading .....................................................................16
3.7 Date/Time Programming..............................................................16
3.8 Profibus Network Parameters Programming....................................17
3.9 Profibus Network Parameters Reading ...........................................17
3.10 Operating Parameters Programming...........................................18
3.11 Operating Parameters Reading...................................................19
3.12 Default parameters programming...............................................20
3.13 Digital Output Activation ...........................................................20
3.14 Status Reading ........................................................................20
3.15 RF Deactivation........................................................................21
3.16 RF Activation ...........................................................................21
3.17 Data request ...........................................................................22
3.18 Queue data request..................................................................22
3.19 ISO 15963 Transponders ‘Inventory’ Command ...........................23
3.20 Reading a Data Block of an ISO 15693 Transponder.....................24
3.21 Writing a Data Block of an ISO 15693 Transponder ......................25
3.22 Locking a Data Block of an ISO 15693 Transponder......................26
3.23 ISO 15963 Transponder ‘Get System Info’ Command ...................26
3.24 ISO 15963 Transponder ‘General Protocol’ Command ...................28
A. Supported Transponders.................................................................30
B. ‘.GSD’ File.....................................................................................32

BLUEBOX Gen.2 HFM Page 5 of 37
1Introduction
The BLUEBOX GEN2 INDUSTRIAL HF hereinafter named BLUEBOX is a
read/write RFID device for industrial application (item 5233HM) that
communicates with a ‘host’ system (typically a PLC) through a PROFIBUS DP
serial line. The BLUEBOX acts as a joint through a set of commands between
the host system and the rfid tag/s (or transponder/s) present near the
antenna/s.
PROFIBUS DP (Dezentrale Pheripherie) was developed for high-speed
communication between central controllers (typically PLC) and remote devices
(I/O, drives, actuators, sensors, ...).
More devices can be connected on the bus, each one has a different address
(the address is a configurable parameter). Once configured, the
communication with devices is cyclic.
Therefore the BLUEBOX is a remote device (‘slave’) with an input buffer and
an output buffer (the length of the buffers is a configurable parameter).
Similarly, in order to talk to the BLUEBOX, the PLC (‘master’) has an output
buffer (same size of the corresponding input buffer of the BLUEBOX) and an
input buffer (same size of the corresponding output buffer of the BLUEBOX).
The input buffer of the BLUEBOX can only be modified by the ‘master’ (PLC)
while the output buffer of the BLUEBOX can only be modified by the ‘slave’
that is the BLUEBOX. The aim of the cyclic communication is to keep up to
date the corresponding buffers at the ‘master’ side and at the ‘slave’ side.
At the application level, a specific protocol has been defined for enabling the
delivery of control messages from the PLC to the BLUEBOX and reply
messages from the BLUEBOX to the PLC.
For the developers: a .GSD (Generic Station Description) is provided that
defines the characteristics of the device and is necessary for the configuration
of the profibus network.

BLUEBOX Gen.2 HFM Page 6 of 37
An USB connection, working as virtual com, is also available on the BLUEBOX
and is principally used as service port to configure the operating parameters
and to update the firmware of the device, the ‘BLUEBOX show’ program of the
SDK is foreseen to explicate these operations.
Furthermore the BLUEBOX is able to handle 2 channels of digital I/O; each
channel can be used as output to drive a low side load or as input either driven
by a ‘pnp’ output or by a ‘clean’ contact. Warning, when the I/O is used as
input, do not use it also as output to avoid conflicts! The BLUEBOX is available
with 1 external RF antenna (item 5233HM).
Compared to the BLUEBOX GEN2 INDUSTRIAL HF SR device (item 5233H),
the BLUEBOX GEN2 INDUSTRIAL HF MR device (item 5233HM) differs for
the following reasons:
•increased RF power which leads to higher performance in terms of
read/write distance;
•only the ISO 15693 transponders are supported;
•specific 50 ohm antennas with an IP65 industrial TNC connector have to
be used;
•ability to set the RF power level and mode of communication
transponder/reader (ASK with 1 subcarrier / FSK with 2 subcarriers).
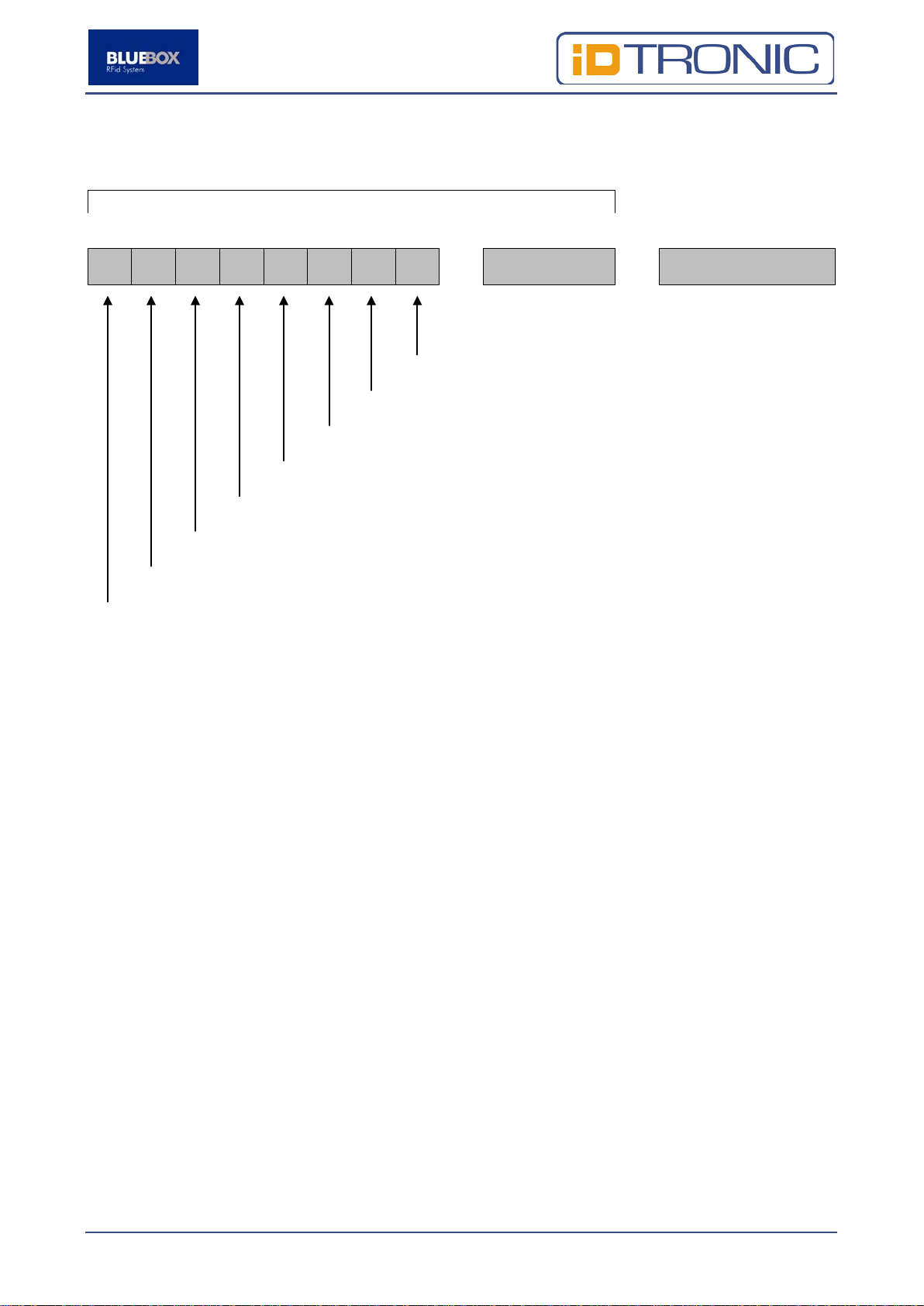
‘master’
out
buffer
‘slave’
in buffer
‘slave’
out
buffer
‘master’
in buffer
PLC
BLUEBOX
PROFIBUS DP

BLUEBOX Gen.2 HFM Page 7 of 37
2Operating Features
Supported transponders (or tags) and relative associated functions are
described in annexe A.
In ‘continuous’ mode the BLUEBOX is characterized by the coexistence of 2
‘parallel’ and asynchronous activities: the tag identification consisting of a
repetitive inventory of tags through an anticollision loop and the
communication with the ‘host’ system. The ‘continuous’ identification activity
interacts with the communication activity through a buffer that contains the
code of the last identified tags or that is empty indicating the absence of tags.
Due to synchronization and filtering reasons, the buffer is handled for each tag
by a parameter defined as ‘hold time’ same as ‘filter time’ defined below (to be
set in the range of 0 … 99 seconds or 0 ... 99 minutes, default value 1 second)
and allows to extend ‘artificially’ the presence of the tag after it leaves the
antenna’s influence area; this behavior is observable looking at the antenna
led status that is ‘on’ indicating the presence of tag/s and also through the
activation of the digital output channel 1 (if its ‘automatic’ management is
enabled by the flag defined in the general parameters). Through the command
‘data request’ it is possible to get the data contained in the buffer (tag/s ID).
The BLUEBOX handles also a 31 elements FIFO queue which is combined with
the ‘filter time’ general parameter (to be set in a range of 0 … 99 seconds or 0
... 99 minutes, default value 1 second) that prevents the queue saturation in
case of a tag ‘continuous’ presence. At the end of each inventory session, for
each indentified tag, the BLUEBOX compares it to the list of previous read
transponder/s. If the considered transponder do not belong to the list, it is
defined as ‘new’, its code (tag ID) will be inserted in the queue and the filter
time will be started. Otherwise (the transponder belong to the list), the
BLUEBOX verifies if the filter time is expired. In this case (the filter time is
expired), the transponder is defined as ‘new’ and will be processed as
described above, otherwise only the filter time will be rearmed. Through the
command ‘queue data request’ and the relative ‘ack’, it is possible to get the
data contained in the queue (tag ID) and unload it.
Every time that a new transponder is identified, the buzzer will be activated for
250ms if its ‘automatic’ management is enabled by the flag defined in the
operating parameters.
In ‘continuous’ mode the BLUEBOX can be configured to obtain the behavior
of a ‘spontaneous’ reader that will send a message on the RS232 serial line
and on the Ethernet channel every time that a ‘new’ transponder is identified.
The BLUEBOX allows the execution of ‘on request’ functions. During the
execution of these functions, the ‘continuous’ identification activity will be
suspended temporarily; the involved commands are relative to device
configuration and tag read/write specific activities.
If not required, the ‘continuous’ identification activity can be disabled through
a flag defined in the general parameters. In this case, the BLUEBOX will only
execute the ‘on request’ commands already defined above.
BLUEBOX Gen.2 HFM Page 8 of 37
List of configurable operating parameters:
Parameters Range / Choice Default
Hold time 0 ... 99 seconds 1 sec
Filter time 0 ... 99 seconds
0 ... 99 minutes 1 sec
Buzzer Disabled, enabled Enabled
Output channel 1 Disabled, enabled Disabled
‘Continuous mode’ Disabled, enabled Enabled
List of configurable profibus network parameters:
Parameters Range / Choice Default
Profibus address 1 ... 126 126
Profibus buffer length 8, 12, 16, 20, 32, 64 16

BLUEBOX Gen.2 HFM Page 9 of 37
3Communication Features
3.1 Introduction
There are two types of data packets used in the communication:
•Outgoing data packets from the ‘master’ (PLC) to the ‘slave’ in order to
send a command or an answer to the BLUEBOX
•Incoming data packets to the ‘master’ (PLC) from the ‘slave’ (BLUEBOX)
carrying for example the answer to a command
In the following example, a buffer length of 16 bytes is supposed.
The outgoing data packets from the ‘master’ assume the following structure:
Header
1° Byte 2° Byte Max 14 Byte
7 6 5 4 3 2 1 0 Length Data
Req tx
Ack rx
More
The outgoing data packet consists of a header (first two bytes) and a data
buffer of 14 bytes.
The first byte of the header consists of the following flags:
•Bit 7 … 3: Not used
•Bit 2: More, set to ‘1’ means that the message is composed of several
data packets
•Bit 1: Ack rx, reception acknowledge
•Bit 0: Req tx, transmission request
The second byte (Length) of the header specifies the number of data bytes in
the data buffer (max 14 data bytes in this example).
BLUEBOX Gen.2 HFM Page 10 of 37
The incoming data packets to the ‘master’ assume the following structure:
Header
1° Byte 2° Byte Max 14 Byte
7 6 5 4 3 2 1 0 Length Data
Ack tx
Req rx
More
Busy
Reply Ack
Reply Nak
Tag present
Alive (toggle)
Also the incoming data packet consists of a header (first two bytes) and a data
buffer of 14 bytes in this example.
The first byte of the header consists of the following flags:
•Bit 7: Alive, toggles every second and means that the ‘slave’ is running
correctly
•Bit 6: Tag present, set to ‘1’ by the ‘slave’ means that a transponder is
present near the antenna/s (detected by the ‘continuous’ identification
activity)
•Bit 5: Reply Nak, set to ‘1’ by the ‘slave’ means that an error has
occured
•Bit 4: Reply Ack, set to ‘1’ by the ‘slave’ means that the received
command has been processed
•Bit 3: Busy, set to ‘1’ by the ‘slave’ means that the ‘slave’ is processing
the command message from the ‘master’
•Bit 2: More, set to ‘1’ by the ‘slave’ means that the message is composed
of several data packets
•Bit 1: Req rx, reception request (from ‘slave’)
•Bit 0: Ack tx, transmission acknowledge
The second byte (Length) of the header specifies the number of data bytes in
the data buffer (max 14 data bytes).
The messages consist of one or more data packets. If the length of the
message is shorter than 14 bytes, the message will be composed of only 1
data packet. If the length of the message is bigger than 14 bytes, the message
will be composed of more than 1 data packet; in this case the header of all the
transmitted data packets, apart the last one, will present at ‘1’ the flag ‘More’

BLUEBOX Gen.2 HFM Page 11 of 37
indicating that the message is not completed and another data packet will
follow.
The communication between ‘master’ and ‘slave’ for a command message take
place with the following handshake:
1. The ‘master’ loads the buffer with the command message and
subsequently sets to ‘1’ the flag ‘Req tx’ to inform the ‘slave’ that a data
packet is ready to be acquired
2. The ‘slave’ acquires the data packet from the ‘master’ and confirm the
completion of the operation by setting to ‘1’ the flag ‘Ack tx’
3. After having received the acknowledgment of the completion of the
operation through the flag ‘Ack tx’ at ‘1’, the ‘master’ resets to ‘0’ the
flag ‘Req tx’
4. After having verified that the flag ‘Req tx’ is reset to ‘0’, also the ‘slave’
resets to ‘0’ the flag ‘Ack tx’
5. During the execution time of the received command, the ‘slave’ sets to
‘1’ the flag ‘Busy’ to inform the ‘master’ that it is not temporarily not
available for further communication
In the case of a message length that needs more than one data packet, the
previous handshake will be repeated for every data packet until the end of the
message.
The answer of the ‘slave’ to a command message from the ‘master’ can take
place through a full answer message or in a short form depending of the type
of command. In the case of a short form answer, it take place through the
setting to ‘1’ of the flag ‘Reply Ack’ or the flag ‘Reply Nak’ (in function of the
result of the execution of the command).
The communication between ‘slave’ and ‘master’ for an answer message take
place with the following handshake:
1. The ‘slave’ loads the buffer with the answer message and subsequently
sets to ‘1’ the flag ‘Req rx’ to inform the ‘master’ that a data packet is
ready to be acquired
2. The ‘master’ acquires the data packet from the ‘slave’ and confirm the
completion of the operation by setting to ‘1’ the flag ‘Ack rx’
3. After having received the acknowlegment of the completion of the
operation through the flag ‘Ack rx’ at ‘1’, the ‘slave’ resets to ‘0’ the flag
‘Req rx’
4. After having verified that the flag ‘Req rx’ is reset to ‘0’, also the ‘master’
resets to ‘0’ the flag ‘Ack rx’
In the case of a message length that needs more than one data packet, the
previous handshake will be repeated for every data packet until the end of the
message.
Practical example:
The ‘master’ device requests the inventory of the transponder/s present/s near
the antenna; for the example, we suppose that there are 2 ICODE2
transponders having the following hex codes: 0xE0, 0x04, 0x01, 0x00, 0x01,
0x02, 0x03, 0x04 and 0xE0, 0x04, 0x01, 0x10, 0x11, 0x12, 0x13, 0x14.
The bit 7 of the first byte of the header of the incoming buffer of the ‘master’
device will be indicate as ‘T’ (toggle) because we suppose that the ‘slave’ is
running correctly.
BLUEBOX Gen.2 HFM Page 12 of 37
In this case, the message from the ‘master’ command is composed of the byte
0x10 (code of the ‘inventory’ command).
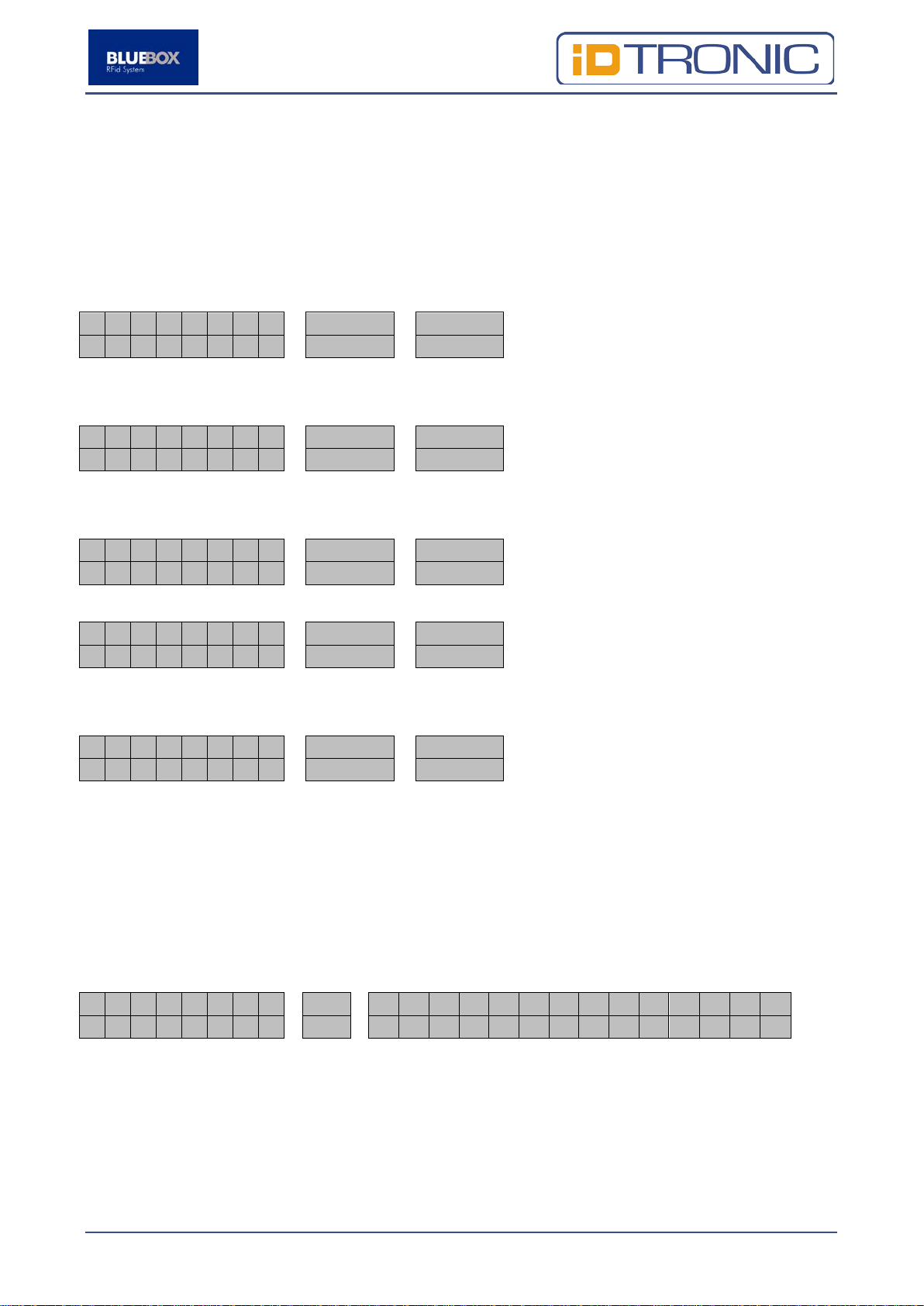
In the following the sequence of the composition of the outgoing and incoming
buffer of the ‘master’ device will be graphically depicted.
For the transmission of this first data package the ‘master’ loads the second
byte of the header (length) and the data bytes of the command (in this case
only one) and then sets to ‘1’ the flag ‘Req tx’ for the ‘slave’.
1° Byte 2° Byte Data
0 0 0 0 0 0 0 1 01 10 OUT
T 1 0 0 0 0 0 0 IN
The ‘slave’ confirms the reception of the data packet setting to ‘1’ the flag ‘Ack
tx’. 1° Byte 2° Byte Data
0 0 0 0 0 0 0 1 01 10 OUT
T 1 0 0 0 0 0 1 IN
Consequently the ‘master’ will reset to ‘0’ the flag ‘Req tx’ and then also the
‘slave’ will reset to ‘0’ the flag ‘Ack tx’.
1° Byte 2° Byte Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 0 0 0 1 IN
1° Byte 2° Byte Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 0 0 0 0 IN
The ‘slave’ will set to ‘1’ the flag ‘Busy’ during the execution of the received
command.
1° Byte 2° Byte Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 1 0 0 0 IN
At the end of the execution, the ‘slave’ will answer to the ‘master’ sending the
readed transponder code.
The message consists of 2 data blocks because the code length is 20 bytes and
the data buffer can only support at most 14 bytes.
For the first data packet the ‘slave’ loads the second byte of the header
(length) and the data bytes of the first 14 data bytes of the answer and then
sets to ‘1’ the flag ‘More’ (another data packet will follow) and the flag ‘Req rx’
for the ‘master’.
1° Byte
2°
Byte
Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 0 1 1 0 0E 10 00 E0 04 01 00 01 02 03 04 E0 04 01 10 IN
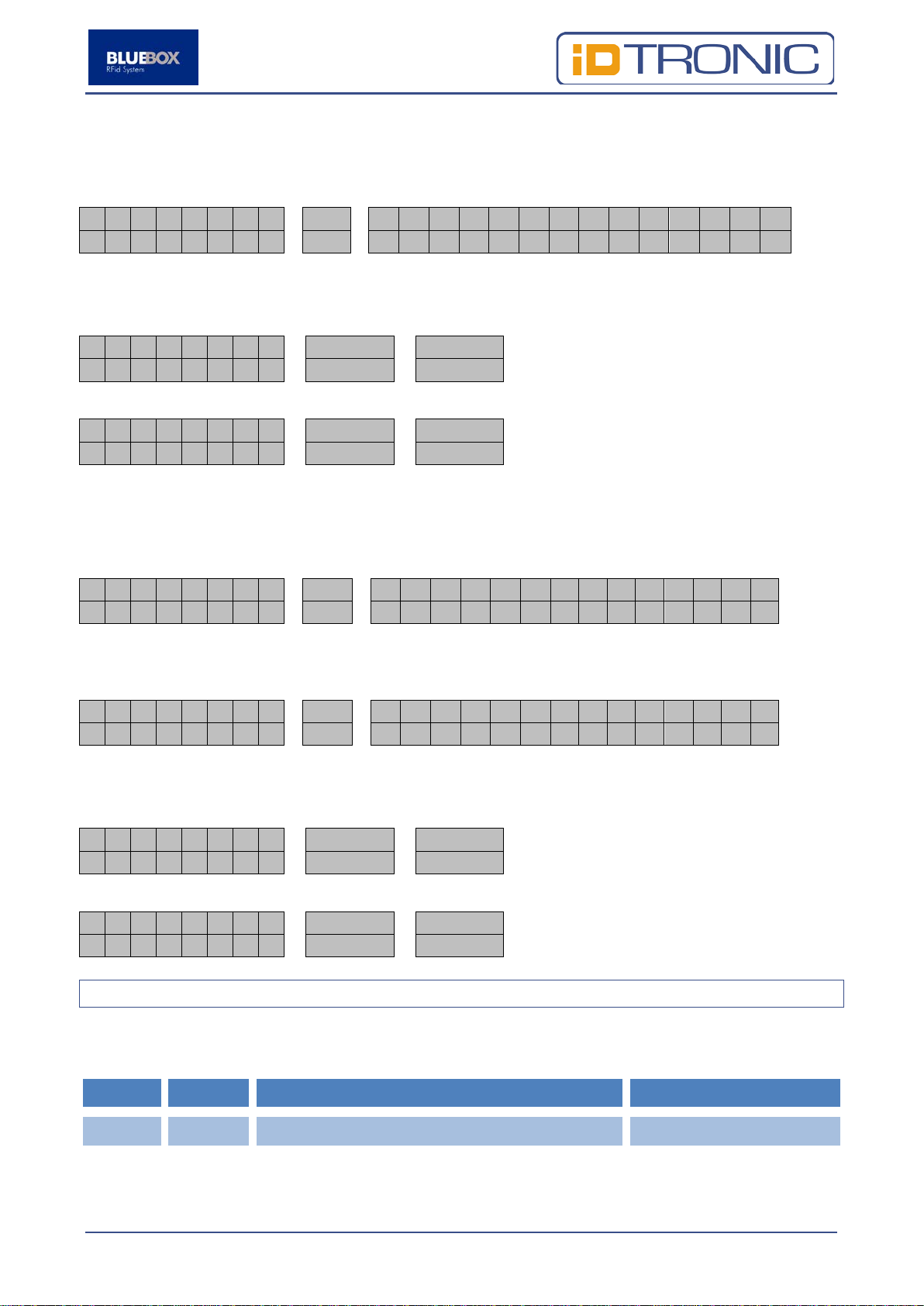
BLUEBOX Gen.2 HFM Page 13 of 37
The ‘master’ confirms the reception of the data packet setting to ‘1’ the flag
‘Ack rx’.
1° Byte
2°
Byte
Data
0 0 0 0 0 0 1 0 OUT
T 1 0 0 0 1 1 0 0E 10 00 E0 04 01 00 01 02 03 04 E0 04 01 10 IN
The handshake will terminate by resetting to ‘0’ the flag ‘Req rx’ (by the
‘slave’) and the flag ‘Ack rx’ (by the ‘master’).
1° Byte 2° Byte Data
0 0 0 0 0 0 1 0 OUT
T 1 0 0 0 1 0 0 IN
1° Byte 2° Byte Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 0 1 0 0 IN
The ‘slave’ again loads the second byte of the header (length) and the data
bytes of the last 4 data bytes of the answer and then resets to ‘0’ the flag
‘More’ (no other data packet will follow) and the flag ‘Req rx’ for the ‘master’.
1° Byte
2°
Byte
Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 0 0 1 0 04 11 12 13 14 IN
The ‘master’ confirms the reception of the data packet setting to ‘1’ the flag
‘Ack rx’.
1° Byte
2°
Byte
Data
0 0 0 0 0 0 1 0 OUT
T 1 0 0 0 0 1 0 04 11 12 13 14 IN
The handshake will terminate by resetting to ‘0’ the flag ‘Req rx’ (by the
‘slave’) and the flag ‘Ack rx’ (by the ‘master’).
1° Byte 2° Byte Data
0 0 0 0 0 0 1 0 OUT
T 1 0 0 0 0 0 0 IN
1° Byte 2° Byte Data
0 0 0 0 0 0 0 0 OUT
T 1 0 0 0 0 0 0 IN
3.2 Device Reset
This command is used to restart the BLUEBOX (the device has the same
behaviour like when it is powered up).
Byte Value Description Notes
1 0x30 Command code
The answer to this command is given in short form through the ‘Reply Ack’ /
‘Reply Nak’ flags (this command don’t ‘produce’ data).
BLUEBOX Gen.2 HFM Page 14 of 37
3.3 Device Serial Number Reading
This command is used to get the SN code of the BLUEBOX (unique for each
device and assigned during the production process), the SN is constituted by 6
bytes.
Byte Value Description Notes
1 0x2A Command code
2 0x01 Command code
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x2A Command code
2 0x01 Command code
2+1 0x.. Serial number, 1st byte The sn is 6 bytes long
2+i 0x.. Serial number, i th byte i < 6
2+6 0x.. Serial number, 6th byte i = 6
Note: the SN is a numeric code constituted by 12 digits, the bytes of the SN
are BCD-coded and so every byte encodes 2 digits.
3.4 FW Version Reading
This command used to get the firmware version loaded on the BLUEBOX.
Byte Value Description Notes
1 0x34 Command code
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x34 Command code
1+1 0x.. Firmware version, 1st ASCII char
The fw version is 16
chars long
1+i 0x.. Firmware version, i th ASCII char i < 16
1+16
0x..
Firmware version, 16th ASCII char
i = 16
The 16 bytes (2 to 17) are a string of 16 ASCII chars that defines the firmware
version. The general form is: ‘BB_TWO_HM y.yy ‘; y.yy gives the firmware
version (example 1.16).

BLUEBOX Gen.2 HFM Page 15 of 37
It is also possible to get the firmware version of the HFM reader module
mounted in the BLUEBOX.
Byte Value Description Notes
1 0x34 Command code
2 0x01 Module number
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x34 Command code
2 0x01 Module number
2+1 0x.. Firmware version, 1st ASCII char
The fw version is 16
chars long
2+i 0x.. Firmware version, i th ASCII char i < 16
2+16 0x.. Firmware version, 16th ASCII char i = 16
The 16 bytes (3 to 18) are a string of 16 ASCII chars that defines the firmware
version. The general form is: ‘MIDRANGE x.x‘; x.xx gives the firmware
version (example 1.7).
3.5 Temperature Reading
This command sends back the internal temperature of the BLUEBOX
measured by the on board temperature sensor.
Byte Value Description Notes
1 0x3A Command code
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x3A Command code
2 0x.. Integer value of the temperature in °C
3 0x.. Fractional value of the temperature. Bits 7,
6, 5 encode the fractional value in steps of
0.125 °C:
00000000b .000 °C
00100000b .125 °C
...
11100000b .875°C

BLUEBOX Gen.2 HFM Page 16 of 37
3.6 Date/Time Reading
This command sends back the date/time of the BLUEBOX available on the
internal real time clock device.
Byte Value Description Notes
1 0x28 Command code
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x28 Command code
2 0x.. Year value thousands and hundereds.
BCD encoded byte.
3 0x.. Year value tens and units.
BCD encoded byte.
4 0x.. Month value tens and units.
BCD encoded byte.
5 0x.. Day value tens and units.
BCD encoded byte.
6 0x.. Hour value tens and units.
BCD encoded byte.
7 0x.. Minute value tens and units.
BCD encoded byte.
8 0x.. Second value tens and units.
BCD encoded byte.
3.7 Date/Time Programming
This command is used to set the date/time of the BLUEBOX in the internal
real time clock device.
Byte Value Description Notes
1 0x29 Command code
2 0x.. Year value thousands and hundereds.
BCD encoded byte.
3 0x.. Year value tens and units.
BCD encoded byte.
4 0x.. Month value tens and units.

BLUEBOX Gen.2 HFM Page 17 of 37
Byte Value Description Notes
BCD encoded byte.
5 0x.. Day value tens and units.
BCD encoded byte.
6 0x.. Hour value tens and units.
BCD encoded byte.
7 0x.. Minute value tens and units.
BCD encoded byte.
8 0x.. Second value tens and units.
BCD encoded byte.
The answer to this command is given in short form through the ‘Reply Ack’ /
‘Reply Nak’ flags (this command don’t ‘produce’ data).
3.8 Profibus Network Parameters Programming
This command is used to set the address and the length of the buffers for the
Profibus communication of the BLUEBOX.
Byte Value Description Notes
1 0x3D Command code
2 0x03 Command code
3 0x.. Address:
Decimal 1 … 126
4 0x..
Buffers length:
•0x00 -> 8 bytes
•0x01 -> 12 bytes
•0x02 -> 16 bytes
•0x03 -> 20 bytes
•0x04 -> 32 bytes
•0x05 -> 64 bytes
The answer to this command is given in short form through the ‘Reply Ack’ /
‘Reply Nak’ flags (this command don’t ‘produce’ data).
Note: after the command execution, it is necessary to restart the BLUEBOX
(command ‘Device Reset’) in order to apply these new parameters.
3.9 Profibus Network Parameters Reading
This command is used to get the values of the Profibus communication
parameters (address and length of buffers) of the BLUEBOX.
Byte Value Description Notes

BLUEBOX Gen.2 HFM Page 18 of 37
Byte Value Description Notes
1 0x3C Command code
2 0x03 Command code
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x3C Command code
2 0x.. Address:
Decimal 1 … 126
3 0x..
Buffers length:
•0x00 -> 8 bytes
•0x01 -> 12 bytes
•0x02 -> 16 bytes
•0x03 -> 20 bytes
•0x04 -> 32 bytes
•0x05 -> 64 bytes
4 0x.. Don’t care
5 0x.. Don’t care
6 0x.. Don’t care
7 0x.. Don’t care
8 0x.. Don’t care
3.10 Operating Parameters Programming
This command is used to set the operating parameters of the BLUEBOX that
are: hold time (00 ... 99 seconds), filter time (0 ... 99 seconds / 0 ... 99
minutes), flag for ‘automatic’ buzzer management (disabled, enabled), flag for
‘automatic’ output 1 management (disabled, enabled) and flag for ‘continuous’
mode (disabled, enabled).
Byte Value Description Notes
1 0x2F Command code
2 0xFF Don’t care value 0xFF suggested value
3 0x48 Don’t care value 0x48 suggested value
4 0x20 Don’t care value 0x20 suggested value
5 0x01 Don’t care value 0x01 suggested value

BLUEBOX Gen.2 HFM Page 19 of 37
Byte Value Description Notes
6 0x03 Don’t care value 0x03 suggested value
7 0x..
Filter time:
•Decimal 0 … 99 for time in seconds
(0 … 99 seconds)
•
Decimal 100 … 199 for time in minutes
(0 … 99 minutes)
8 0x..
Flags: single bits are dedicated to disable
(0 value) or enable (1 value) functions:
•Bit 7: automatic buzzer management
•Bit 6: automatic output 1 management
•Bit 5 … bit 1: not used
•Bit 0: to disable ‘continuous’ mode
The answer to this command is given in short form through the ‘Reply Ack’ /
‘Reply Nak’ flags (this command don’t ‘produce’ data).
Note: after the command execution, the BLUEBOX resets itself to apply the
new parameters.
3.11 Operating Parameters Reading
This command is used to get the values of the operating parameters of the
BLUEBOX.
Byte Value Description Notes
1 0x2A Command code
If command is not successfully executed, the answer is given in short form
through the ‘Reply Ack’ / ‘Reply Nak’ flags; otherwise, the BLUEBOX answers:
Byte Value Description Notes
1 0x2A Command code
2 0x.. Don’t care value
3 0x.. Don’t care value
4 0x.. Don’t care value
5 0x.. Don’t care value
6 0x.. Don’t care value
7 0x..
Filter time:
•Decimal 0 … 99 for time in seconds (0 …
99 seconds)
•
Decimal 100 … 199 for time in minutes
(0 … 99 minutes)

BLUEBOX Gen.2 HFM Page 20 of 37
Byte Value Description Notes
8 0x..
Flags. Single bits are dedicated to disable (0
value) or enable (1 value) functions:
•Bit 7: automatic buzzer management
•Bit 6: automatic output 1 management
•Bit 5 … bit 1: not used
•Bit 0: to disable ‘continuous’ mode
3.12 Default parameters programming
This command is used to set the default values of the communication and
operating parameters of the BLUEBOX.
Byte Value Description Notes
1 0x31 Command code
The answer to this command is given in short form through the ‘Reply Ack’ /
‘Reply Nak’ flags (this command don’t ‘produce’ data).
Note: after the command execution, the BLUEBOX resets itself to apply the
new parameters.
3.13 Digital Output Activation
This command is used to excite each individual output and to set also the
duration in case of impulsive use.
Byte Value Description Notes
1 0x37 Command code
2 0x.. Output to activate:
•0x01 -> Output 1
•0x02 -> Output 2
3 0x..
Activation time:
•0x01 … 0x63 (1 ... 99 seconds -
> in
case of ‘impulsive’ output activation
•0x81 -> ‘Continuous’ activation
•0x80 -> Deactivation
The answer to this command is given in short form through the ‘Reply Ack’ /
‘Reply Nak’ flags (this command don’t ‘produce’ data).
3.14 Status Reading
The BLUEBOX will answer to this command with a series of information about
the current status and particularly about the digital inputs status.
Byte Value Description Notes
Table of contents
Other BlueBox RFID System manuals



Popular RFID System manuals by other brands







suprema
suprema XPass D2 installation guide

Brady
Brady FR22 user guide

Lyngsoe Systems
Lyngsoe Systems S21 user guide

Feig Electronic
Feig Electronic OBID i-scan ID ISC.LRM2500-A installation manual

Feig Electronic
Feig Electronic OBID classic-pro ID CPR.M04.P/AB-U2 Installation

HID
HID iCLASS SE U90 Series installation guide





