MyBot Base Kit Assembly Instructions v1.4a Page 7 of 18
(For kits supplied with black wheels)
MyBot Base Kit | Assembly Guide
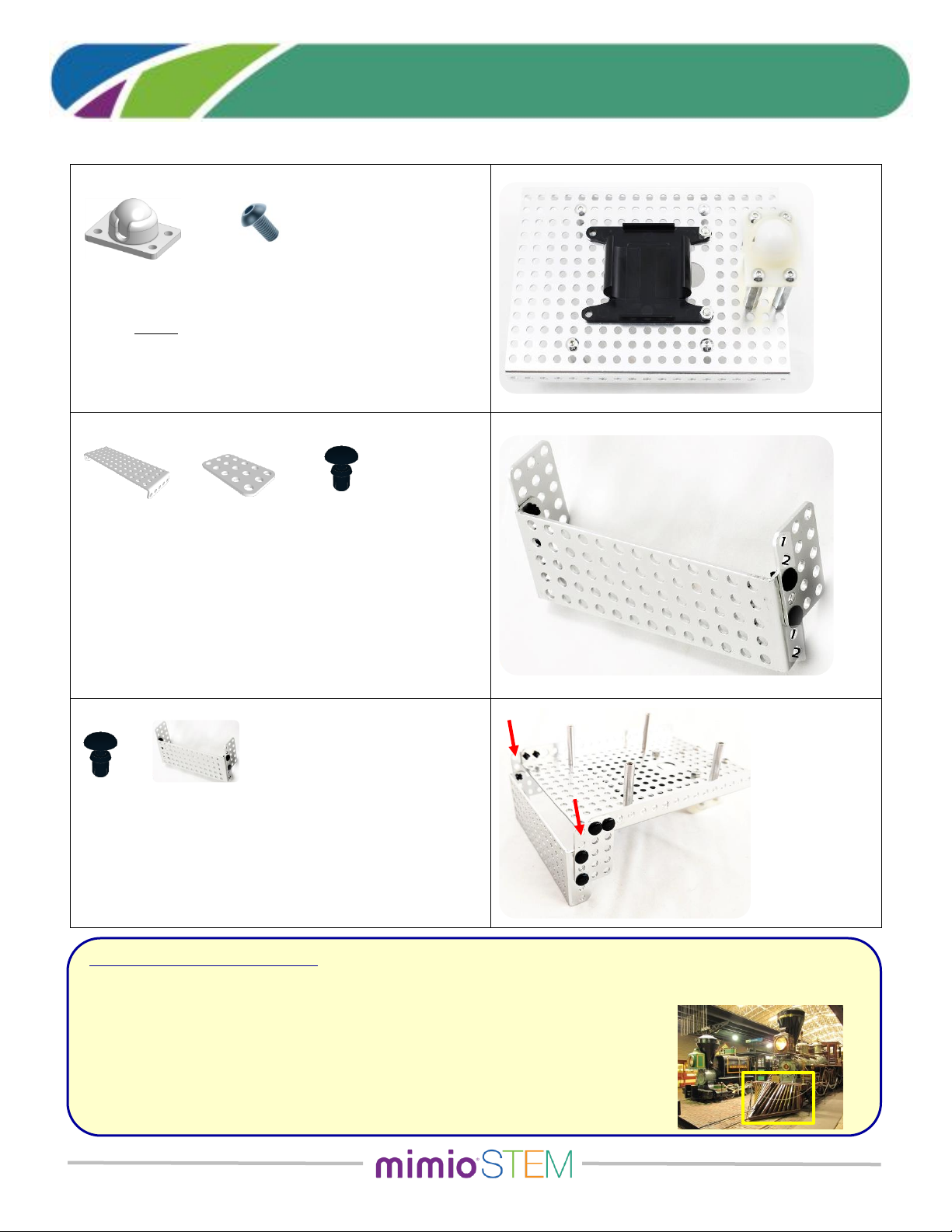
STEP 7 –Assembling the Touch Sensor “Plunger” – Part 1:
The Plunger extends the reach of the touch sensor in front of
the robot. An exploded image is shown here. These
instructions will build the plunger in steps.
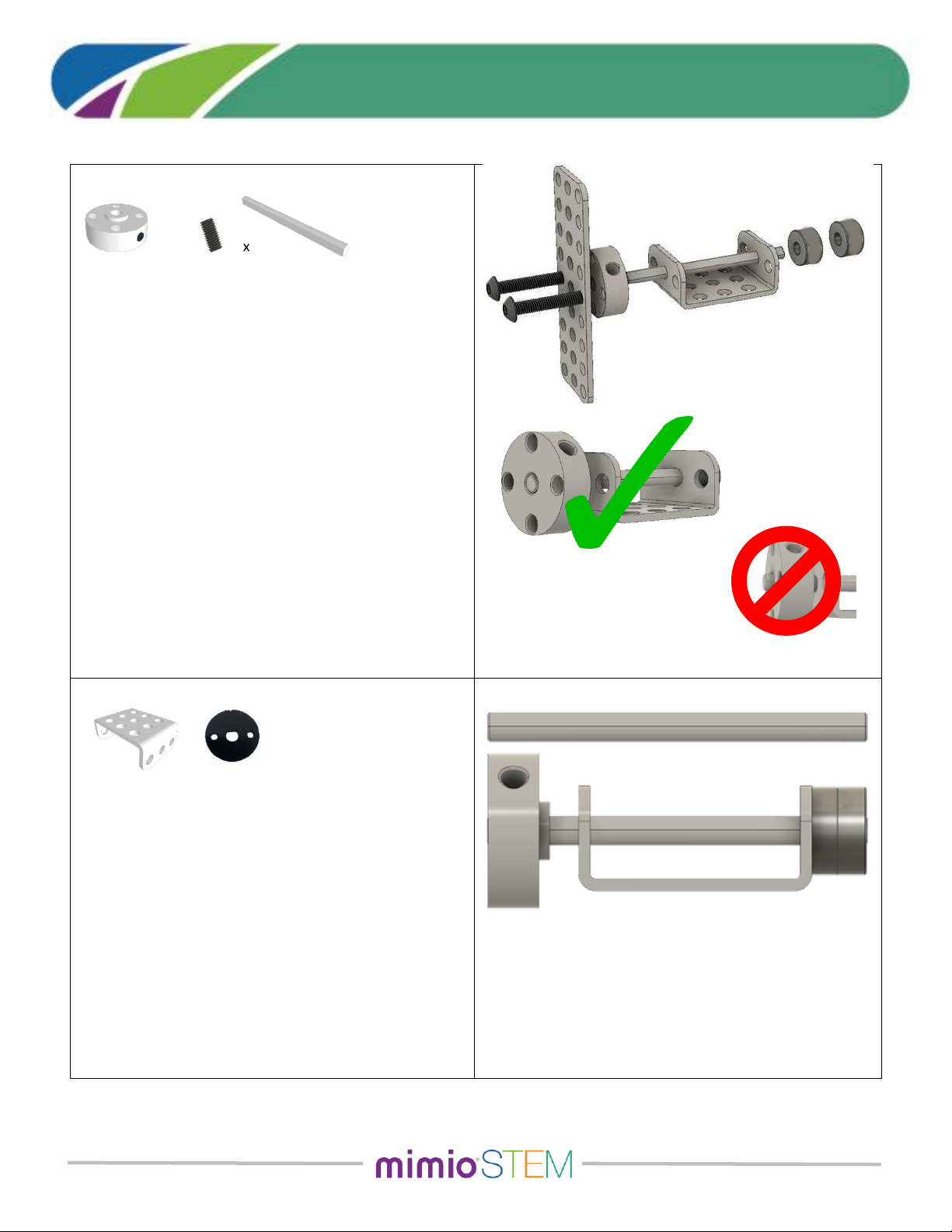
7. Begin by threading the Set Screw into the Axle Hub.
Since the set screw is so small, it helps to put the set
screw onto your allen wrench, then line it up with the
hole on the side of the hub and screw it in about half-
way. Confirm that the shaft slides easily through the
center hole of the hub.
a. Next, place the Axle Hub on a flat surface with the
‘dimple’ facing up (as shown in the parts drawing
above).
b. Insert the axle into the center hole of the hub so
that it is standing straight up with the flat of the
shaft facing the set screw.
c. Without lifting or tilting, tighten the set screw to
securely hold the shaft in the axle hub.
d. Inspect the flat end of the Axle Hub. The shaft
should be flush with the surface
STEP 8 –Assembling the Touch Sensor “Plunger” – Part 2:
When complete, the length of this plunger will be the same as
the length of the shaft by itself.
8. With the Axle Hub still on the table, slide the 3x3
Flanged Plate onto the shaft using the center holes on
the two flanges.
a. Align one of the Axle Collars with the D-shape of the
shaft and push the Collar onto the shaft. You may
find that using a small hammer to tap the collar
down will help. (Alternately, using a quarter-sized
coin between the collar and your hand will help you
apply more force to the collar.) Push the Collar so it
is flush with the end of the shaft.
b. Using the same procedure, press the second Collar
onto the end of the shaft and press it down so it is
flush with the end of the shaft.