9
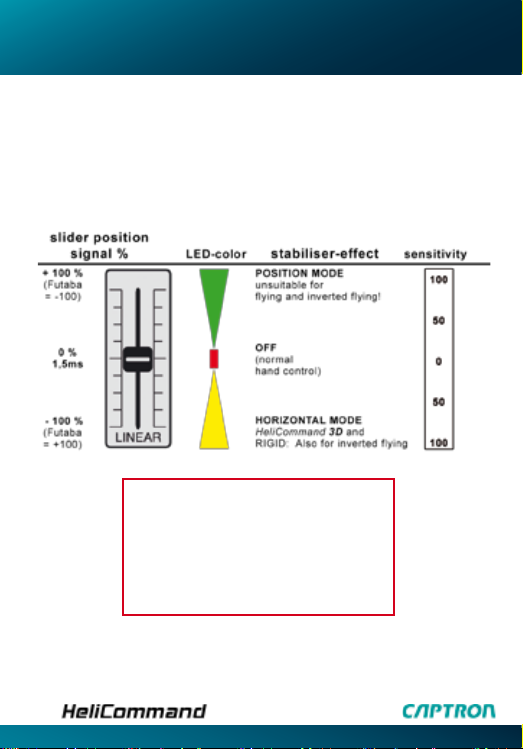
Basically, all versions (3A, 3D, Rigid) offers the following modes of operation:
LED red = stabilising functions switched off (= conventional)
LED yellow = horizontal mode
LED green = position mode
Horizontal mode („yellow“): moves the helicopter to the horizontal attitude if you
release the aileron (roll-axis) and elevator (pitch-axis) controls.
This works totally independently of the optical quality of the ground surface. For
indoor ying you should select this mode; if you do not wish to, please read the
notes on page 29.
Position mode („green“): in this mode the unit stabilises the model’s position as
well as its horizontal attitude. This is the most powerful stabilisation, and is ideal
for “automatic” hovering and slow circuits. It works most effectively at heights of
about 0.5 to 2 metres above a natural surface (grass, gravel etc.). If you release
the aileron and elevator controls, the system actively brakes the helicopter until it
is stationary; all the pilot has to control is the collective
pitch / throttle function. If the model exhibits any slow drift at the hover, this can
very easily be corrected manually. For slow circuits close to the ground, you can
set a forward speed by keeping a slight constant push on the elevator stick, then
direct the model using the tail rotor stick (just like steering a car).
For higher speed and for ying at heights above about 5 m, this mode would
tend to be a nuisance because of its corrective actions; in this case you should
switch to horizontal mode („yellow“).
The conguration for the above-described functions is possible without PC,
unless four head-servos are used.
RIGID mode: this is a fourth mode of operation only available with the
HeliCommand RIGID: it is designed for ybar-less rotor heads, stabilising and
maintaining the helicopter’s attitude (see page 5).
Rigid mode can be combined to working parallel with the three modes
described above. These options are explained on page 26.
In addition to the previously described stabilising functions, all HeliCommand
versions offer the following supplementary functions:
swashplate mixer, tail rotor gyro and automatic trim.
Description of facilities