Crossbow Technology CXM543 User manual

Crossbow Technology, Inc., 41 E. Daggett Dr., San Jose, CA 95134
Tel: 408-965-3300, Fax: 408-324-4840
CXM543 User’s Manual
High Speed Orientation Sensor
Revision 1.2, October 2001
PN 6001-0015
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

©1999-2000 Crossbow Technology, Inc. All rights reserved. Information
in this document is subject to change without notice.
Crossbow and SoftSensor are registered trademarks and DMU is a
trademark of Crossbow Technology, Inc. Other product and trade names
are trademarks or registered trademarks of their respective holders.
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

Table of Contents
1Description Of The System...................................................1
2System Specifications ...........................................................2
3Electrical and Mechanical Interface.....................................3
4System Startup and Checkout..............................................5
4.1 Startup Using a Terminal Emulator Program.....................................5
4.2 System Checkout.....................................................................................6
5CXM543 Configuration Options and Data Output Formats 9
6Description of the CXM543 Orientation Angles.................13
7Appendix A. CXM543 Command and Data Format
Specifications ............................................................................15
7.1 CXM543 command specification.......................................................15
7.2 Discussion of the CXM543 Data Transmission Modes .................16
7.3 Explanation of Checksum Calculation..............................................21
7.4 EEROM Map.........................................................................................22
7.5 Software Data Correction Equations.................................................25
8Appendix B. Hard Iron Correction for CXM543 ...............26
8.1 Setup procedure.....................................................................................26
8.2 Determining the Hard Iron Offset and Enabling the Hard Iron
Correction............................................................................................................27
8.3 Hard Iron Commands...........................................................................28
8.4 Three dimensional Correction.............................................................29
8.5 Two dimensional Correction...............................................................30
8.6 Caveats....................................................................................................31
9Appendix C. Filter Values and Data Rates.........................32
10 Appendix D. Warranty and Support Information...........33
10.1 Customer Service ..................................................................................33
10.2 Contact Directory..................................................................................33
10.3 Return Procedure...................................................................................33
10.4 Warranty.................................................................................................34
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

About this Manual
The following annotations have been used to provide additional
information.
XNOTE
Note provides additional information about the topic.
þEXAMPLE
Examples are given throughout the manual to help the reader understand the
terminology.
PIMPORTANT
This symbol defines items that have significant meaning to the user
MWARNING
The user should pay particular attention to this symbol. It means there is a
chance that physical harm could happen to either the person or the
equipment.
The following paragraph heading formatting is used in this manual:
1 Heading 1
1.1 Heading 2
1.1.1 Heading 3
Normal
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 1
1Description Of The System
The model CXM543 is a high-speed digital output orientation measuring
system. It can transmit the orientation angles (roll, pitch and azimuth) of a
body to which it is mounted at a rate of 25 samples/second. The basic
accuracy of the CXM543 is ±0.5°. Data transmissions are made over a bi-
directional serialport using either RS-232 or TTL levels. The baud rate and
sampling rate are user programmable.
The CXM543 measures orientation by employing a 3-axes accelerometer to
measure roll and pitch and a three-axis magnetometer to determine azimuth.
The CXM543 can be configured to run in two modes viz. Vector and Angle.
In vector mode, the unit transmits the accelerometer and magnetometer
sensor outputs and transmission speeds up to 250 samples/sec are possible.
In angle mode, the CXM543 transmits the system roll, pitch and azimuth
angles.
The CXM543 can be used in either a command mode or autosend mode. In
the command mode, the CXM543 responds to commands to transmit data
issued by an external computer. In autosend mode, the CXM543
commences sending data as soon as power is applied to the unit.
The CXM543 can be supplied with an optional connector box, which allows
easy powering and connection to an external computer.
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]
CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 2
2System Specifications
Accuracy roll, pitch ±1°
azimuth ±1.5°
Range roll 0 to 360°
pitch (inclination) 0 to 180°
azimuth 0 to 360°
Data levels RS232 and TTL
Data output rate (Angle mode) 100 Hz
Power 100 mA @ +6 to +15 VDC
A to D 16 bit Sigma Delta
Baud rate (user selectable) 300, 1200, 2400, 4800, 9600,
19200, 38400, 72800
Temperature range 0 to 50°C
Size 2.75”W x 4.08”L x 1.13”H
7 cm x 10.4 cm x 2.9 cm
Connector 9 pin nonmagnetic “D”
(female)
Sensor axis alignment to case ±0.5°
Linearity ±0.1% full scale
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 3
3Electrical and Mechanical Interface
The CXM543 is powered from a single input voltage that can range
between +6 V and +15 V. Current consumption is 100 mA. Two serial
interfaces are present; one that uses RS-232 levels and one that uses TTL
levels. The baud rate isuser programmable and can be set at the following
values: 300, 1200, 2400, 4800, 9600, 19200, 38400, and 72800. The data
words employ 8 bits with one stop bit and no parity.
A female 9 pin D connector is used to provide an electrical interface to the
CXM543 system. The Pin out of this connector is as follows:
Pin Function
1 not used
2RS 232 out
3RS 232 in
4not used
5ground
6TTL serial out
7TTL serial in
8configure
9+ V in (+7.5 V to +15 V)
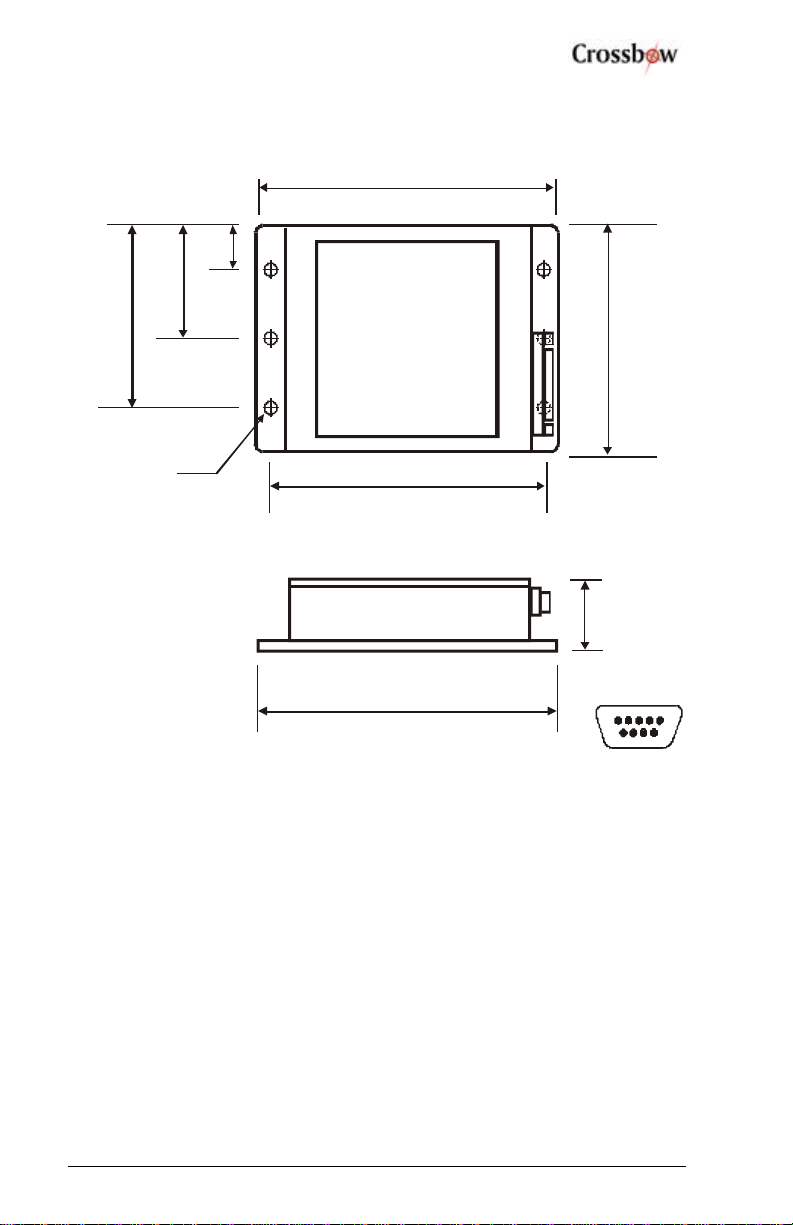
A drawing showing the dimensions and mounting hole design of the
CXM543 is shown below in Fig. 1.
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]
CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 4
Fig. 1 CXM543 High Speed Orientation Sensor
4.08”
(10.4 cm)
2.75”
(7 cm)
1.125”
(2.9 cm)
1
4.08”
(10.4cm)
3.75”
(9.5cm)
0.56”
(1.4 cm)
1.375”
(3.5 cm)
2.19”
(5.6 cm)
6 x 0.125”
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]
CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 5
4System Startup and Checkout
4.1 Startup Using a Terminal Emulator Program
Connect the CXM543 to the connection box using the supplied ribbon cable
(use 9-pin male on connection box). Connect a cable from a serial port on a
PC to the connection box (use 9-pin female on connection box). Select the
AUTO option on the connection box switch. This connects pin 1 (CD) of
the 9 pin serial interface connector to the configure port on the CXM543.
Note that on the 9-pin computer connector, pins 1, 4 and 6 are shorted and
pins 7 and 8 are shorted). Connect a power supply (+6 V to +15 V) to the
red (positive) and black banana plug on the connection box.
Alternatively, according to the I/O pin functions described in Chapter 3, use
the RS-232 interface when connecting to a PC COM port.
Start up a terminal emulator program on the PC, e.g. Windows
HyperTerminal, PC Plus, etc. Configure the terminal emulator program for
direct connect to an available COM port and select the baud rate 9600 with
one stop bit and no parity. On the electrical interface to the system, ground
pin 8; this will put the system in configure mode and assure that the baud
rate is 9600 baud. If a connection box is used, select the “config” option on
the connector box switch.
Apply power to the system and check to see that the unit transmits a start up
message:
APS 543 V1.12 Config. Mode
The system can now be configured for operation in various modes as
described in Appendix A by issuing commands over the serial interface.
After configuring the CXM543 system, ungrounded pin 8. If a connector
box is used, select the “Run” option in the connector box switch. In run
mode, the CXM543 sign on message sent at power on is
APS 543 V1.12.
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 6
In run mode, most of the CXM543 parameters, e.g. baud rate, sample rate,
etc. can be set by the user. The main differences between the system
operation in run and configure mode are as follows:
1. The CXM543 can only be calibrated in config mode (by issuing
the l command). The unit is always factory calibrated and
recalibration by the user is not normally required.
2. The unit always starts in the (known) baud rate of 9600 baud.
3. The unit always starts in command mode (as opposed to autosend
mode).
4. The data output format is selected to be A to D count mode.
The main functions of the config mode are to assure that the CXM543
communicates using a known baud rate (9600) andto enable calibration of
the system.
MWARNING
Always operate the CXM543 run mode (when using a terminal program)
unless the baud rate setting of the unit is unknown or calibration of the unit
is required. The output of the CXM543 in the calibrated mode (M=C) is
only valid in the run and auto modes.
4.2 System Checkout
After the CXM543 is operational and communicating with a computer, its
proper operation can be checked out by placing it on a flat, level, non-
magnetic surface. The non-magnetic nature of the surface is necessary to
prevent magnetic field errors, which will reduce the accuracy of the azimuth
reading. The roll and pitch readings are not affected by the magnetic field
present so a flat level surface, even if it is magnetic, can be used to check
roll and pitch.
Place the CXM543 on a level surface with the mounting flange down.
Rotate the system so that the connector is pointed North (use a compass to
accomplish this). Issue the following commands to the CXM543:
M = T <CR>
M = A <CR>
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 7
where, <CR> is a carriage return.
These commands put the CXM543 in text (as opposed to binary) mode and
angle (as opposed to vector) mode. Set the transmission speed to a slow
value (about once per sec.) by issuing the command:
F1 <CR>
Next, put the CXM543 in autosend data mode by issuing the command:
A <CR>
The CXM543 will commence to send data in the format
<Roll> <Pitch> <Azimuth> <Total gravity field> <Total magnetic field>
Verify that the roll angle is near 0°, pitch is near 90° and azimuth is near 0°.
Verify that the total gravity field is near 1.00 and the total magnetic field is
between 0.4 and .6. The magnetic field amplitude (in Gauss) varies around
the world between these values. Next, orient the CXM543 in various
different known orientations and check the accuracy of the measured data.
Stop the data transmission and change to sensor (vector) output mode by
issuing the commands
S <CR>
M = V
A <CR>
The sensor data is transmitted with the format:
<AX> <AY> <AZ> <MX> <MY> <MX>
where, AX is the X accelerometer output, MX is the X magnetometer
output, etc. All accelerometer outputs should range between +1 (down) and
–1 (up). The magnetometer outputs should range from about–0.45 Gauss
to +0.45 Gauss.
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 8
Transmission speed can be changed from among 9 different values by
issuing commands of the format
f#
where, # can be set between 1 (slowest speed) and 9 (highest speed).
Different filter values corresponding to the f# command are as listed in the
table below. Different filter values and corresponding data rates, resolution
and frequency are provided in Appendix B.
Command Filter Value
f1 8000
f2 4000
f3 2000
f4 1000
f5 2002
f6 1002
f7 802
f8 402
f9 282
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 9
5CXM543 Configuration Options and Data
Output Formats
The user can configure the CXM543 system in the following ways:
1. Mode
2. Autosend or command
3. Baud rate
4. Pacing
The mode settings are used to change the format of the data output. The
user can select the data output to be raw A/D counts (M=R) calibrated
sensor (vector) output (M=V) or angles (M=A). The serial output format
can be selected to be text (M=T) or binary (M=B). The user can also
choose whether to append a checksum to the transmission (M=E) or omit
this (M=N).
Some examples of differentdata output formats and the commands used to
create them follow:
Commands Data Formats
to set up
M=T Raw data in a text hex format without a checksum:
M=R AX AY AZ MX MY MZ
M=N 1234 5678 9ABC 1234 5678 9ABC<CR><LF>
The data values are encoded as four digit hex values
separated from each other with a single space. The last
digit of the Z data is followed by a carriage and a line
feed.
M=T Raw data in a text hex format with a checksum (cs):
M=R AX AY AZ MX MY MZ cs
M=E1234 5678 9ABC 1234 5678 9ABC 4E <CR><LF>
This just like the last example except for an addition of a
space and a two Hex digit checksum in between the last
digit of Z and the carriage return. The checksum is
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 10
composed of the sum of all of the digits inall the data
values.
M=T Corrected data in a text decimal format without a
checksum:
M=V AX AY AZ MX MY MZ
M=N 0.23456 0.78900 0.23997 0.98765 0.53210 0.12345
<CR><LF>
The X,Y,& Z values are encoded as decimal values in
Gauss. Each is separated from the next with a single
space. The last digit of the Z data is followed by a
carriage return and a line feed.
M=T Corrected angle data in a decimal format without a
checksum
M=A Roll Pitch Azimuth Tot. Acc Tot. Mag
M=N 100.00 190.00 180.00 1.00000 0.49543 <CR> <LF>
The angle data is in degrees. Each value is displayed as a
3 digits point 2 digits value (XXX.XX) separated by a
space from the next value. The total . field is displayed in
"G"s and the total magnetic field is displayed in Gauss.
M=T Corrected angle data in a decimal format with a checksum
M=A Roll Pitch Azimuth Tot.Acc Tot. Mag CS
M=E 100.70 190.05 1.12 1.00000 0.49543 35<CR> <LF>
The angle data is in degrees. Each value is displayed as a
3 digits point 2 digits value (XXX.XX) separated by a
space from the next value. The total . field is displayed in
Gs and the total Mag field is displayed in Gauss. This is
followed by a two hex digit check sum.
M=B Raw Data in a binary format without a checksum:
M=R AX AY AZ MX MY MZ CS
M=N 12 34 56 78 9A 98 76 54 32 21 FE BC 5A <CR> <LF>
The data values are each encoded as a two-byte value.
The Z magnetometer data is followed by a Check Sum
and that is followed by a constant synchronization byte
(SB) of 5A.
M=B Raw data in a binary format with a checksum:
M=R AX AY AZ MX MY MZ CS
M=N 12 34 56 78 9A 98 76 54 32 21 FE BC FF 5A
<CR> <LF>
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]
CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 11
The data values are encoded as two byte values followed
by a checksum consisting of the lower eight bits of the
sum of the bytes comprising all the data. This is followed
by a synchronization byte of 5A.
PIMPORTANT
When in Binary mode, the X, Y & Z values for acceleration and
magnetometer data are encoded asa signed integer, 2's complement, with a
conversion factor of
(
)
14
2
256*LSBMSB
AorAorAzyx +
=in G and
(
)
15
2
256*LSBMSB
MorMorMzyx +
=in Gauss
The pitch, roll and heading are calculated as follows:
x
zy
A
AA
Pitch
22
1
tan +
=−
z
y
A
A
Roll 1
tan−
=
(
)
( )
−−+
−++
=−
xzzxyyzyx
zyyzzyx
AAMAAMAAM
AMAMAAA
Heading 22
222
1
tan
This is followed by a checksum consisting of the lower eight bits of the sum
of the bytes comprising the X, Y & Z Data for accelerometers and
magnetometers and calculated as,
256 5Aandchecksumexceptbytesallofsum
Checksum=
This is followed by a synchronization byte of 5 A, which represents the end
of the data packet.
To determine the mode of a CXM543, issue the command M?
The autosend command (A) enables data to be sent continuously upon
power on. The output rate of the sent data is set by issuing the command of
the form:
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 12
f#
where, # is a single digit integer between 0 (slow) and 9 (fast). Different
filter values and corresponding data rates, resolution and frequency are
provided in Appendix B. When the CXM543 is set to the slowest rate (f0),
data is transmitted at a rate of about 1 sample/sec when the pacing value is
0000. If slower rates are desired, the user can set the pacing value. This
ranges from 0000 (fast) to FFFF (slow). The pacing value is set by issuing
a command:
P = ####
The user can set the baud rate of the CXM543 to the standard values from
300 to 76800 baud. The baud rate command is of the form:
B = XXXX <CR><LF>
A complete list of the CXM543 commands can be found in Appendix A.
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 13
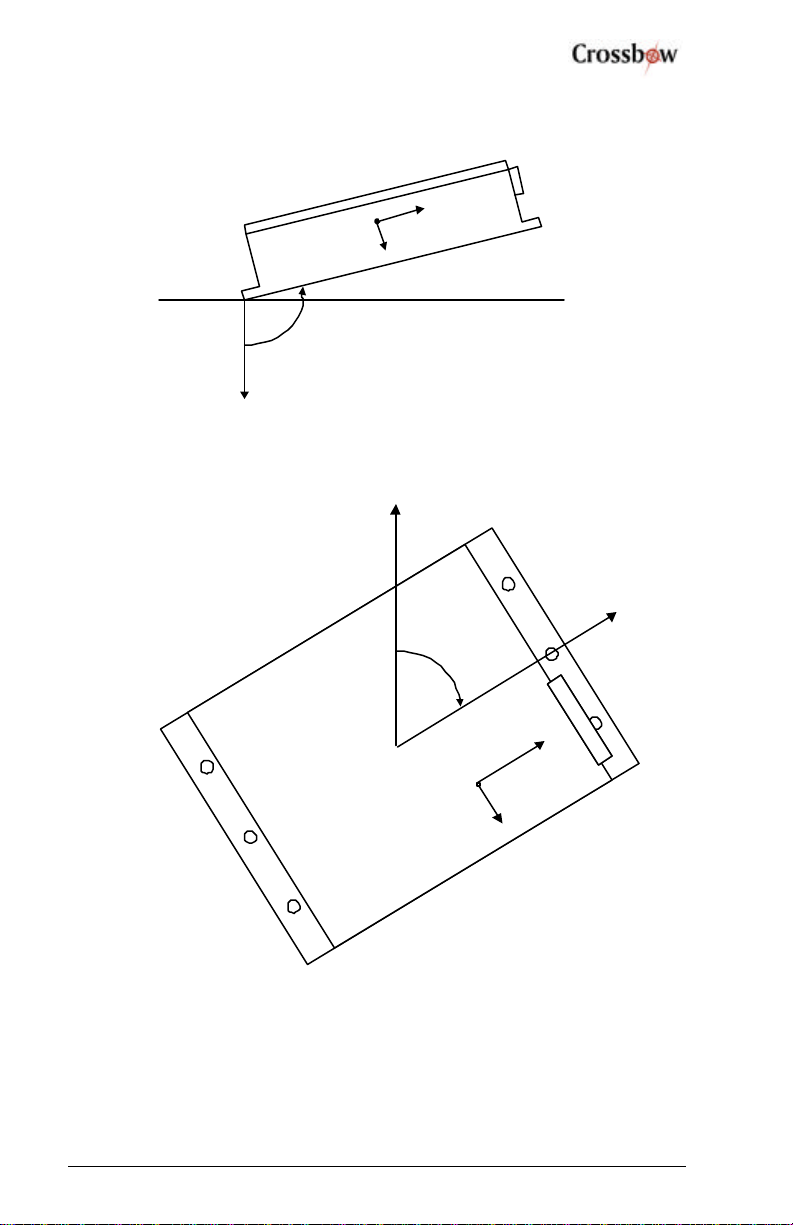
6Description of the CXM543 Orientation Angles
The roll angle of the CXM543 is zero when the Y-axis sensors are oriented
horizontally. A drawing showing the CXM543 in a roll orientation of 90°
(Y sensors down) is shown in Fig. 2.
The inclination angle of the CXM543 is defined as 0°when the X-axis
sensors are pointed down and 180°when the X-axis sensors are pointed up.
The X sensors are aligned with the CXM543 package and point along the
package edge shown in Fig. 2. Fig. 3 illustrates the CXM543 positioned at
an inclination angle of 127°.
The azimuth angle of the CXM543 is referenced to magnetic North and is
zero when the projection of the CXM543 X-axis in a horizontal plane is
oriented North. A diagram showing the CXM543 system oriented at an
azimuth of 45°is shown in Fig. 4.
Fig. 2 CXM543 Roll Definition
Horizontal
Roll = 90 degrees
Down
y
x
z
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]
CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 14
Fig. 3 CXM543Pitch Definition
Fig. 4 CXM543 Azimuth Definition
Down
(Inc. = 0 deg)
Inclination = 127 degrees
Horizontal
(Inc. = 90 deg)
x
y
z
North
x
y
z
Azimuth
45
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 15
7Appendix A. CXM543 Command and Data
Format Specifications
7.1 CXM543 command specification
All Commands must be followed by a return.
All changes to the mode value are saved as the power-up mode.
M? Send the current mode value
M=R All data is sent as raw A/D Counts in ASCII four digit hex values
or binary values depending on the current mode.
M=C All data is sent as Gammas, formatted as Base Ten fixed point text
or binary values depending on the current mode.
M=B Set data is formatted as binary numbers
M=T Set data is formatted as text numbers
M=E Send a checksum with all data
M=N Don't send a checksum
M=A Send corrected data as angles rather than vectors.
M=V Send data as vectors ratherthan angles.
AStart Auto Send Data
SStop Auto Send
DSend the current calibrated data value in a floating-point format.
DR Send the current raw data value in a hex format.
LUnlock calibration mode
OCalibration zero all the sensors
XM Calibration +1/2 Gauss X field applied
YM Calibration +1/2 Gauss Y field applied
ZM Calibration +1/2 Gauss Z field applied
QM Calibration -1/2 Gauss applied field delta
XA Calibrate +1G applied gravitation field
YA Calibrate +1G applied gravitation field
ZA Calibrate +1G applied gravitation field
QA Calibrate -1G applied gravitation field delta
F=#### Set the filter value for the A/Ds.
F? Display the filter value for the A/Ds
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]

CXM543 User’s Manual
Doc.# 6001-0015 Rev 1.2Page 16
F# Quick set filter value # can be 1-9 with 1 giving the slowest and
most accurate data and 9 giving the fastest and least accurate
data.
B? Send the run mode baud rate
B=##### Set run mode baud rate 300 -76800 baud is accepted.
In Config Mode the baud rate is always 9600.
P? Display the current pacing value.
P=#### Set a pacing value to slow the data rate
E? Send all EEROM data
E#### Send EEROM data followed by 4 hex digits address and
optional 2 digits representing the number of bytes to send
W###XX Write EEROM data followed by a 4 hex digit address
and 2 hex digits of data
CReset and calibrate A/D(s)
ISend ID and many internal values
*Reset and restart sensor
?Display help
7.2 Discussion of the CXM543 Data Transmission Modes
At the top level the CXM543 can be put in either raw (M = r) or corrected
(M = c) mode. Raw mode is seldom used after a CXM543 system has been
factory calibrated. This mode is used mainly to enable direct access to the
system analog to digital (A to D) converters for troubleshooting.
When the CXM543 mode is selected to be corrected, the magnetometer and
accelerometer outputs are corrected for scale, offset and alignment factors.
When the CXM543 mode is selected to be corrected, the transmitted data
mode must be further specified as follows:
M = v vector mode
M = a angle mode
When M = v, the magnetometer sensor outputs (in Gauss) and the
accelerometer sensor outputs (in Gs) are transmitted. When M = a, the
CXM543 orientation (roll, pitch and azimuth) angles are transmitted. For
both vector and angle mode the format of the data can be selected as
follows:
M = b binary mode
SUNSTAR传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 FAX:0755-83376182 E-MAIL:[email protected]m
SUNSTAR自动化 http://www.sensor-ic.com/ TEL: 0755-83376489 FAX:0755-83376182 E-MAIL:[email protected]
Table of contents
Other Crossbow Technology Accessories manuals

Popular Accessories manuals by other brands













iNels
iNels RFTI-10B quick start guide

CTC Union
CTC Union AC91 Series product manual

Sphere Alarm
Sphere Alarm SPH010405 user guide

Nice
Nice TTDMP User, installation and safety instructions

Maytag
Maytag MAL2000AXW - Neptune Washer/Dryer Platform Repair parts list

SICK
SICK TiM1 Series operating instructions