e-tarti LPR-200 User manual

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 1
www.etarti.com
In-Motion Belt Scale System
Updated 02/11/2022
LPR-200
Bant Kantarı Kullanım Kılavuzu
Belt Scale User Manual

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 2

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 3
İçindekiler / Contents
1. Giriş / Introduction ............................................................................................................................ 5
1.1. Özellikler / Specifications................................................................................................................. 5
1.2. Teknik Özellikler / Technical Specifications ....................................................................................... 5
2. Boyutlar / Dimensions......................................................................................................................... 6
3. Cihaz Bağlantıları / Device Connections ................................................................................................. 7
3.1. Yük Hücresi / Loadcell Connection ................................................................................................... 8
3.2. Dijital Girişler / Digital Inputs........................................................................................................... 9
3.3. Analog Giriş/Çıkış / Analogue Inputs/Outputs.................................................................................... 9
3.4. Dijital Çıkışlar / Device Outputs...................................................................................................... 10
4. Ayarlar / Settings.............................................................................................................................. 11
4.1. Kullanım / Using Device................................................................................................................. 11
4.1.1. Tuşlar / Keys..................................................................................................................... 11
4.1.2. Toplam Sıfırlama / Clearing Totalisors.................................................................................. 11
4.2. Cihaz Ayarları / Device Settings ..................................................................................................... 11
4.2.1. Dil Seçimi / Language Settings ........................................................................................... 11
4.2.2. Nokta Yeri / Dot Point........................................................................................................ 11
4.2.4. Yürüme Adımı / Step Value ................................................................................................. 12
4.2.5. Mak.Kapasite [kg] / Max Capacity [kg] ................................................................................ 12
4.2.6. Ekran Işık [%99] / Backlight [99% default].......................................................................... 12
4.2.7. EkranZaman Aşım / Backlight TimeOut ................................................................................ 12
4.2.8. Menu Şifresi / Menu Password............................................................................................ 12
4.2.9. LCD Font / Font Select....................................................................................................... 12
4.3. Bant Ayarları / Belt Settings........................................................................................................... 12
4.3.1. Boyutlar / Dimensions........................................................................................................ 12
4.3.2. Katsayılar / Coefficients ..................................................................................................... 13
4.3.3. Sıfırlama / Zero Setting...................................................................................................... 14
4.4. Kalibrasyon /Calibration................................................................................................................. 15
4.4.1. Titreşim / Vibration............................................................................................................ 15
4.4.2. Bant Tur Süre [sn] / BeltRev.Time [sc] ................................................................................ 15
4.4.3. SıfırKalibr. / Zero Calibration ............................................................................................. 15
4.4.4. Yük Kalibr. / Load Calibration............................................................................................ 15
4.4.5. mV/V Test / mV/V Test...................................................................................................... 15
4.4.6. Debi Filtre / th Filter .......................................................................................................... 15
4.5. Haberleşme Ayarları /Comm Setup................................................................................................. 15
4.5.1. Comm1 / Comm1 .............................................................................................................. 15
4.5.2. Comm2 / Comm2 .............................................................................................................. 16
4.6. Çıkış Ayarları / Output Setup.......................................................................................................... 17
4.6.1. Röle Çıkışları / Relay Outputs .............................................................................................. 17
4.6.2. Analog Cıkış / Analog Out .................................................................................................. 17
4.6.3. PID Ayarlar / PID Settings.................................................................................................. 18

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 4
4.7. Analog Giriş / Analogue Input........................................................................................................ 18
4.7.1. Analog Giriş / Analogue Input ............................................................................................ 18
4.8. Servis / Service............................................................................................................................. 19
4.8.1. Yük Hücre Test / Loadcell Test............................................................................................ 19
4.8.2. Enkoder Test / Encoder Test ............................................................................................... 19
4.8.3. Çıkış Test / Outputs Test ................................................................................................... 19
4.8.4. Haberleşme Test / Comm Test ............................................................................................ 19
4.8.5. Fabrika Ayar / Factory Settings............................................................................................ 19
4.8.6. Ver. Güncelle / Version Update............................................................................................ 19
5. Periyodik Bakım / Periodic Maintenance................................................................................................ 20
5.1. Periyodik Mekanik Kontrol / Periodic Mechanic Check ...................................................................... 20
5.2. Periyodik Kalibrasyon / Periyodik Calibration ................................................................................... 20
5.2.1. Sıfır Kalibrasyonu / Zero Calibration..................................................................................... 20
5.2.2. Yük Kalibrasyonu / Load Calibration..................................................................................... 21
5.2.3. Katsayı Hesaplanması & Girilmesi / Coefficient Calculation & Entry ........................................... 21
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 5
1. Giriş / Introduction
Bant Kantarları, konveyör sistemleri üzerinde
taşınan dökme malzemenin tartılması için
tasarlanmıştır. Madencilik, Yapı Malzemeleri ve
Kimyasalları, Gıda, Enerji sektörleri başta olmak üzere
toz, granül, tanecik ve parçalı yapıdaki dökme
malzemenin anlık akış miktarı ve toplam taşınan
miktarının tartılması, kayıt edilmesi, kontrol altına
alınması amacıyla kullanılırlar.
Belt scales are designed for weighing of bulk
materials transported on conveyor systems. Used for
weighing, recording and controlling the amount of
instantaneous flow and total amount of bulk material in
powder, granule, particle and part structure, especially
in Mining, Building Materials and Chemicals, Food and
Energy sectors.
1.1. Özellikler / Specifications
3 Farklı Toplam İzleyebilme (Toplam1, 2, 3)
+/- % 0.25 doğruluk (% 20 - 100 debi aralığında)
1kHz e kadar encoder uyumlu
Hız [m/s], Debi [t/h], Yayılı Yük [kg/m] izleyebilme
Saniyede 3840 adet veri ölçümleyebilme
Modbus RTU/ASCII veya ModbusTCP-PROFINET
opsiyonları
Yığın Kontrol ile belirli miktarda ürün yükleyebilme
Ayarlanabilir periyodik darbe çıkışı
0-10V /4-20mA Analoq Çıkış
Harici Gösterge Çıkışı
PID Kontrol Çıkışı (Sadece Besleyici Bant kantarlarında)
3 ayrı izlenebilir, sıfırlanabilir 10 dijit toplam
göstergesi
+/- % 0.5 doğruluk (% 20-100 debi aralığında)
Geniş enkoder bağlanabilirlik aralığı
İzlenebilir hız, debi, yayılı yük göstergesi
3 different Totalisers (Total1, Total2 and Total3)
+/- % 0.25 accuracy (20% to 100% flowrate)
1kHz e kadar encoder uyumlu
Up to 1kHz encoder output compatible
Speed[m/s], Flowrate[t/h], Spreading Load [kg/m]
monitoring
3840 measurements per second
Modbus RTU/ASCII or ModbusTCP-PROFINET options
Batching with specified quantities of material
Adjustable periodic pulse output
0-10V /4-20mA Analoque Output
Remote Display Output
PID Control Output (WF Only)
3 Totalisors with 10 digit, separately viewable,
resettable
+/- % 0.5 accuracy (Between % 20-100 flowrate)
Wide encoder connectivity selection on encoder input
Monitoring speed, flowrate, spread load values
1.2. Teknik Özellikler / Technical Specifications
Ekran
Screen
1.8" 160x128pixel grafik renkli LCD
1.8" 160x128pixel graphic color LCD
Enkoder Giriş
Encoder Input
0.3 Hz - 1kHz sinyal aralığı
0.3 Hz - 1kHz sinyal aralığı
Yük Hücresi Giriş
Loadcell Input
350 Ohm (Maksimum 10 Yük Hücresi)
350 Ohm (Maximum 10 Loadcells)
İç Çözünürlük
Internal Resolution
24bit
24bits
Ölçüm Hızı
Measurement Speed
3840 örnek/saniye
3840 samples/second
Yük Hücresi Besleme
Loadcell Excitation
5Vdc
Girişler / Çıkışlar
Inputs / Outputs
8adet optik izole Dijital Giriş, 8adet 24V/1A maks. Dijital Çıkış
8pcs optically isolated Digital Inputs, 8pcs 24V/1A max. Digital Outputs
Opsiyonlar
Options
Opsiyonel 2adet 0-10V Analog Giriş
Optionally 2pcs 0-10V Analogue Inputs
Opsiyonel 2adet 0-10V yada 4/20mA Analog Çıkış
Optionally 2pcs 0-10V or 4/20mA Analogue Output
Haberleşme
Communication
1xRS232, 1xRS485 ve 1xRS232 sadece Tx çıkış (Standart Modbus RTU/ASCII)
1xRS232, 1xRS485 and 1xRS232 Tx only (Standard Modbus RTU/ASCII)
Çalışma Sıcaklığı
Working Temperature
-20/70°C
Besleme
Supply
24Vdc +/- % 20
Kutu
Case
Ray montaj 104x100mm metal kutu
Din-Rail mount 104x100mm metal case

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 6
2. Boyutlar / Dimensions
100 x 104 x 35 mm Ray Tipi Kutu Din-Rail Case

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 7
3. Cihaz Bağlantıları / Device Connections
A B
HMI
Yığın Kontrol START / BATCH Control START
Sayaç Çıkışı / Counter Output
Yığın Kontrol STOP / BATCH Control STOP
+24 GND
Besleme
Power
+24 Out GND
Enkoder
Encoder
Toplam Bekletme Girişi / Do not Totalize Input
Besleyici Bant Otomatik Mode / WeightFeeder RUN
WF Ön Patinaj Sensör / WF Front Skid Sensor
WF Arka Patinaj Sensör / WF Back Skid Sensor
WF Bant Kaydı Sensör / WF Belt SHIFT Sensor
Yığın Çıkışı / Batching Output
WF Aktif Çıkışı / WF Run Output
WF Hata Çıkışı / WF Error Output
WF Uyarı Çıkışı / WF Warn Out
-Sinyal
+Sinyal
-Besleme -E ile -S kısa devre edilir.
+Besleme +E ile +S kısa devre edilir.
0-10V Çıkış/ 0-10V Out
4-20mA Çıkış/ 0-10mA Out
GND

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 8
3.1. Yük Hücresi / Loadcell Connection
4-Telli Bağlantı / 4Wire Connection 6-Telli bağlantı / 6-Wire Connection
Not: J-Box kullanıldığı ya da uzak mesafe bağlantılarda 6-telli bağlantı tercih edilir.
Bağlantı Renkleri - (ZEMIC Yük Hücreleri)
Kırmızı --> +EXC (4 uçlu ise +Sense ile kısa devre edilir)
Siyah --> -EXC (4 uçlu ise -Sense ile kısa devre edilir)
Yeşil --> +INPUT
Beyaz --> -INPUT
Bağlantı Renkleri - (Diğer Yük Hücreleri)
Yeşil --> +EXC (4 uçlu ise +Sense ile kısa devre edilir)
Siyah --> -EXC (4 uçlu ise -Sense ile kısa devre edilir)
Beyaz --> + INPUT
Kırmızı --> - INPUT
YÜK HÜCRESI KONTROLÜ
mV/V Test menüsüne girilerek mevcuttaki yük durumu kontrol edilebilir. mV/V
birimli olarak gösterilecektir.
Yük hücreleri genellikle 2.000mV/V çıkış değerine sahip olduklarından ve
güvenlik olarak %25 yük bırakılır ise (2.0mV/V x %25 = 0.5mV/V) bandın yüklü
halindeki gösterge 1.500mV/V değerini aşmaması beklenir. Aşırı yüklenmeler ya
da bandın çalışması esnasında gerçek yük geçişi dolayısıyla ya da bakım
esnasında bu %25lik dilim aşılabilir ve yük hücresi zarar görebilir.
Ayrıca bandın yüklü ve yüksüz durumunda mV/V değeri olarak oransal olarak
belirli bir artış gözlemlenmelidir. Aksi durumda bandın aşırı gergin yada mekanik
olarak temas edip etmediği kontrol edilmelidir.
Note:When J-Box is used or long distance connections, 6-wire connection is
preferred.
ConnectionColors- (ZEMIC Loadcells)
Red --> +EXC (Short with +Sense for 4-wire Loadcell)
Black --> -EXC (Short with -Sense for 4-wire Loadcell)
Green --> +INPUT
White --> - INPUT
ConnectionColors- (Other Loadcells)
Green --> +EXC (Short with +Sense for 4-wire Loadcell)
Black --> -EXC (Short with -Sense for 4-wire Loadcell)
White --> + INPUT
Red --> - INPUT
CHECKING LOADCELL
By using mV/V Test menu, the current load status can be checked. Shown as
mV/V unit.
Since load cells generally have an output value of 2.000mV/V and if 25% load is
left as safety (2.0mV/V x 25% = 0.5mV/V), it is expected that the indicator in the
loaded state of the band will not exceed 1.500mV/V. This 25% slice may be
exceeded and the load cell may be damaged due to overloads or real load transfer
during the operation of the belt or during maintenance.
In addition, a proportional increase in mV/V value should be observed in the
loaded and unloaded condition of the band. Otherwise, it should be checked
whether the band is over-tensioned or mechanically contacted.

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 9
3.2. Dijital Girişler / Digital Inputs
Cihaz girişleri aşağıdaki tabloada verilmiştir.
Device inputs are given in the table below
Nr
Tanım Description
1
Enkoder Girişi Encoder Input
2
Yığın Kontrol Başlat Batching START
3
Yığın Kontrol Durdur Batching STOP
4
Toplam Engelleme Do not TOTALIZE weighings
5
Besleyici Çalıştırma WF RUN (0:Manual Operation, 1:Automatic Control
6
Ön Rulo Patinaj izleme WF Front Roller Sensor for Skidding
7
Arka Rulo Patinaj İzleme WF Back Roller Sensor for Skidding
8
Bant Kaydı İzleme WF Belt Shift Input (Touching the Sides)
3.3. Analog Giriş/Çıkış / Analogue Inputs/Outputs
Girişler Optik İzole 5-24Vdc
Inputs Optically Isolated 5-24Vdc

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 10
3.4. Dijital Çıkışlar / Device Outputs
Cihaz çıkışları aşağıdaki tabloda verilmiştir.
Device outputs are given in the table below
No
Tanım Description
1
Mekanik Sayaş Çıkışı (500ms) Totalizing for Mechanical Counter Output (500ms ON)
2
Yığın Kontrol Çıkışı yada Hata Çıkışı Bath Output or Error Statement
Yığın Çıkışı Batching Output
Yığın başlatıldığında çeker Energizes after a Start of Batch Input
Hata Çıkışı Error Statement
Yığın Kontrol değeri 0 (sıfır) seçilir ise “hata-yok” çıkışı olarak kullanılır.
When BatchSet Value = 0, this output used for “No Error” state.
Q2 = 0 ADC hatası, ADC Module Hatası, kapasite aşıldı)
(ADC overflow, ADC module error, Capacity over)
Q2 = 1 Hata Yok, Cihaz sağlıklı.
No error, device is OK
3
Besleyici bant çalışıyor (sadece besleyici bantta geçerlidir) Besleyici bant girişi aktif iken ve
Modbus StatusB hata yok iken aktiftir
WF is RUN state (Only WF)
(When WF RUN input is exists and no Error flag on Modbus StatusB)
4
Besleyici Hata Durumu
(Modbus StatusB hata bitleri aktif olduğunda çeker)
WF is in Error Condition
(Error flags is 1 from the Modbus StatusB)
5
Besleyici Uyarı durumlarıdır (Patinaj, bant kayması, Analog çıkış aralık dışında ise)
Indicates WF is in Warning Condition (Skid, Shift, Analog out under min or max)
6
Kullanım dışı Not Used
7
Kullanım dışı Not Used
8
Kullanım dışı Not Used
Çıkışlar FET tipi
Maksimum 24Vdc/1A
Relay Outputs
24V/1A maximum
24V 1 2 3 4 5 6 7 8
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 11
4. Ayarlar / Settings
4.1. Kullanım / Using Device
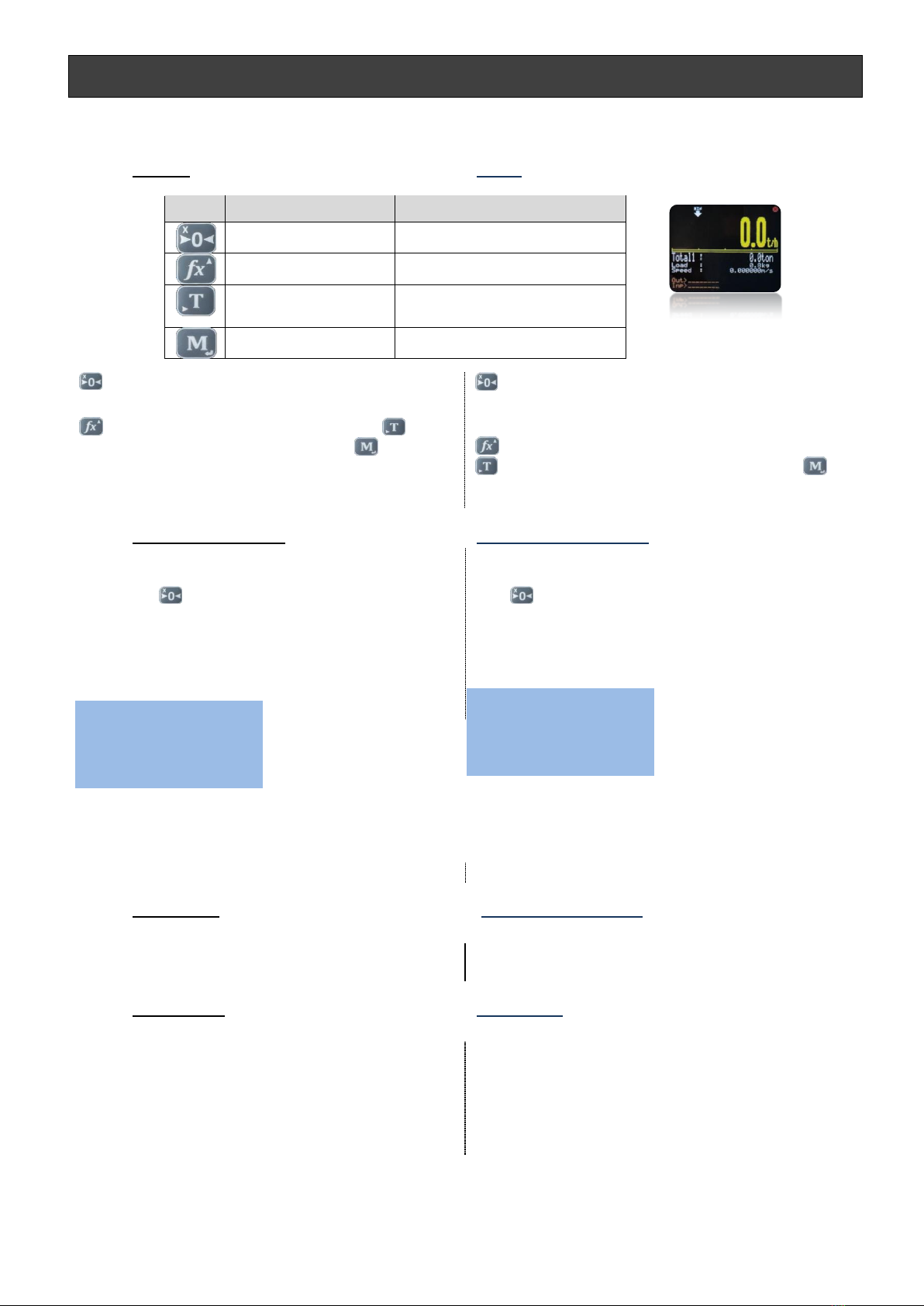
4.1.1. Tuşlar / Keys
tuşu Ana ekranda SIFIRLAMA amacıyla kullanır. O anda hangi toplam
gösterilmekte ise o toplam silinmesi için sıfırlama ekranı gelir. Şifre: T1 için 0001,
T2 için 0002, T3 için 0003 tür. MENÜ ŞIFRESI 0009
tuşu Ana ekran gösterge verileri değiştirmek için kullanılır. tuşu Test
amaçlı olarak Toplam göstergesini 10kat hassas moda alır. tuşu MENÜ ye
girişi olarak kullanılır.
key is used to ZERO the totalisors on mainsreen. Zeroing password screen is
displayed for the selected total value. Password is 0001 for Total1, 0002 for
Total2 and 0003 for Total3. MENU PASSWORD is 0009
key is used to change displayed home screen values.
key is used for 10 times resolution for the totalisor while testing. key
is used to enter the Menu.
4.1.2. Toplam Sıfırlama / Clearing Totalisors
Cihazın 3 adet toplam göstergesi vardır. Toplam
göstergesi yanında hangi toplamı gösteriyorsa o rakam
vardır. Sıfır tuşuna basıldığında ana ekranda o
anda gösterilmekte olan Toplam sıfırlama menüsü
ekrana gelir.
Toplam1 Şifresi: 0001
Toplam2 Şifresi: 0002
Toplam3 Şifresi: 0003
The device has 3 total indicators. There is a total
indicator next to which the sum is displayed. When the
zero key is pressed, the Total Reset menu is
displayed on the main screen.
Total1 Password: 0001
Total2 Password: 0002
Total3 Password: 0003
4.2. Cihaz Ayarları / Device Settings
Cihazla ilgili ayarların bulunduğu menüdür.
Device setup menu
4.2.1. Dil Seçimi / Language Settings
Cihaz dil seçimidir. İngilizce/Türkçe seçimleri vardır.
Device Language selection . English/Turkish selectios
are done
4.2.2. Nokta Yeri / Dot Point
Ekranda gösterilecek noktanın yeri seçimidir.
Kalibrasyondan bağımsız olarak ekranda noktanın yeri
seçimi yapılabilir. Otomatik olarak parametre değişimi
olmayacağından noktanın değiştirilmesi durumunda
ilgili parametre değerleri ve ağırlık kalibrasyonu
yinelenmelidir.
Ekranda gösterilecek noktanın yeri seçimidir.
Kalibrasyondan bağımsız olarak ekranda noktanın yeri
seçimi yapılabilir. Otomatik olarak parametre değişimi
olmayacağından noktanın değiştirilmesi durumunda
ilgili parametre değerleri ve ağırlık kalibrasyonu
yinelenmelidir.
P56:Sifre1
11
0000
P56:Password 1
0000
TUŞ
KEY
ANA EKRANDAYKEN
ONMAIN SCREEN
MENÜDEYKEN
ONMENU
Sıfırlama
Zeroing Totals
Çıkış
Exit
Ekran değiştirme
Switch Screen
Yukarı
Up Side
x10 olarak toplam
görüntüleme
Show Totalized value as x10
Aşağı/Sağa
Down/Right
Menuye giriş
Menu Enter
Giriş/Onay
Enter/Accept

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 12
4.2.4. Yürüme Adımı / Step Value
Ekran yürüme adımıdır.
Screen step value for weighing.
4.2.5. Mak.Kapasite [kg] / Max Capacity [kg]
Cihaz yük hücresi maksisum ağırlık bilgisidir.
Yük hücrelerine aşırı ağırlık gelmesini engellemek için
kullanılır, belirlenen değer aşıldığında ekranda Hata
mesajı çıkarak kullanıcı aşırı yüke karşı uyarılmış olur.
Ek olarak otomatik sıfırlama kullanıldığı durumlarda bu
parametredeki değerin %2 si hesaplanarak işlemlerde
kullanılır.
Device loadcell maximum loading information.
Used to notify used to overloadings by showing an
Error message on display.
Additionally, 2% of this value is used for Automatic
zeroing operations.
4.2.6. Ekran Işık [%99] / Backlight [99% default]
Cihaz ışık seviyesi ayarıdır. 0-99 aralığında
değiştirilebilir.
The devicec backlight level setting. It can be changed
between 0-99.
4.2.7. EkranZaman Aşım / Backlight TimeOut
LCD ekran arka plan ışığı otomatik kısma zamanı
seçimidir. Belirlenen süre boyunca menü işlemi olmaz
ise ekran ışık seviyesi azaltılır. İptal etmek için 0000
olarak seçilir.
The LCD backlight automatic dimming time selection.
Backlight will be dimmed after defined time passed
without menu operations. Use as 0000 to cancel
dimming feature.
4.2.8. Menu Şifresi / Menu Password
Menu girişte şifre aktif/pasif seçimi için kullanılır. Evet
seçilir ise menüye her girişte şifre sorulur.
Şifre 0009 olarak girilmelidir.
Password is required selection. There will be a
password screen if selected as “Yes”
Password is entered as 0009 (fixed)
4.2.9. LCD Font / Font Select
Ana ekran font seçimi yapılır.
Font type of main screen can be selected.
4.3. Bant Ayarları / Belt Settings
4.3.1. Boyutlar / Dimensions
4.3.1.1.
Tartı Köprüsü [mm] / WeightBridge [mm]
Tartı köprüsü mesafesidir. Etkin ağırlık ölçme mesafesi
olup tartı rulosunun her iki yanındaki mesafenin eşit
olduğu varsayılır ise iki rulo arası mesafe kadar
olmalıdır. Aksi taktirde sol ve sağ taraftaki rulo
mesafelerinin ortalaması alınarak bulunur.
The weighbridge length. For the calculation of the
WeightLength, it is assumed that the distance on both
sides of the weighing roller is equal, it should be the
distance between the two rolls. Otherwise, it is found
by taking the average of the roll distances on the left
and right sides.
4.3.1.2.
Enkoder Adım [mm] / EncoderStep [mm]
Enkoder mesafe sensörü adım mesafesidir. Buna göre
kullanılan enkoderin bağlandığı mekanik pozisyona
göre enkoderin ürettiği her bir darbe için kat edilen
mesafe değeridir. Örnek olarak 147mm çapına sahip
bir tambura bağlanmış 50pulse/tur bir enkoder
kullanımış ise;
Enkoder Çevre = 2*pi*r = pix147= 461.81mm olup,
Pulse başına 461.80/50 = 9.236mm mesafe kat
edilecektir.
Encoder step value in mm. Accordingly, according to
the mechanical position to which the encoder is
connected, the value of the distance traveled for each
pulse produced by the encoder. Example; If a 50pulse
/ round encoder is connected to a drum with a
diameter of 147mm;
Encoder Surround = 2*pi*r =pi*147 = 461.81mm
Distance per pulse is 461.81/50 = 9.236mm
4.3.1.3.
Enkoder Zaman Aşımı [sn] / Encoder Time Out [sc]
Bandın sürekli olarak durma ve hareket etmesi
gerçekleşiyor ise bandın durması ya da harekete
geçmesi algılanması ne kadar çabuk olursa o
doğrulukta ölçme gerçekleşir. Dolayısı ile pulse
süresine uygun olarak zaman aşımı belirlenmelidir.
Örnek;
50darbe/tur çıkışına sahip bir enkoder kullanıyorsak ve
2 saniyede bir tam tur yapıyorsa, 2sn/50 = 40ms de bir
If the band is constantly stopping and moving, the
faster the perception of the band's stop or motion
occurs, the more accurate the measurement takes
place. Therefore, the timeout must be determined in
accordance with the pulse duration.
Example;
If you are using an encoder with 50pulse/revolution
and a full turn is takes 2 seconds, a pulse will be read

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 13
pulse okunacaktır. Ancak bant bir motor sürücü ile
%20-%100 aralığında değişken hızlarda kullanılıyor ise
bu durumda bandın %20 ye kadar yavaşladığı
durumda 40ms/(%20/%100) = 200ms de bir darbe
gelecek kadar yavaşlayacaktır. Dolayısı ile de güvenli
çalışma bölgesinde kalabilmek için 200ms ve üzeri
olarak set edilmelidir.
at 2sec / 50 = 40ms. However, if the band is being
used with a motor drive at variable speeds between
20% and 100%, then a 40ms / (20% / 100%) =
200ms pulse will slow down until the band slows down
to 20%. Therefore, it must be set to 200ms or over to
be able to stay in safe working area.
4.3.1.4.
Sabit Hız [m/s] / Fixed Speed [m/s]
Sabit hızlı sistemlerde sistem hızı girilmesi için kullanılır.
Enkoder girişine verildiği müddetçe sabit hız ile bant
dönüyor kabul edilir. Enkoder kullanılacak ise 0
(sıfır) olarak girilmelidir.
It is used to enter the system speed in fixed speed
systems. It is assumed that the band is rotating at
constant speed as long as it is supplied to the encoder
input. If a speed encoder is to be used, then
must be entered as 0 (zero).
4.3.1.5.
Ekran Tipi / Screen Type
Cihazın kulanım yerine göre ekran tipi belirlenir. Akış
kontrol ya da debi öncelikli izleniyor ise Flowmeter
seçilir aksi durumda Toplam göstergesi gösterilir. İlgili
seçime göre LCD ekran değişecektir.
The display type is determined according to the usage
status of the device. If Flowmeter is selected then flow
control or flow rate is monitored first, otherwise Total
indication is displayed. The LCD screen will change
accordingly.
4.3.1.6.
Açı Düzelt / Ang.Correct
Açı düzeltme özelliği seçidir. LPR-100 cihazına haricen
açı ölçme modülü bağlanmalıdır. Aksi durumda "Hayır"
seçilmelidir. Aktif edildiğinde ekranda açı ölçme ikonu
belirecektir.
Angle Correction feature selection. This feature
requires additional external AngleMeasurement
Module. Otherwise please select "No". Thre will be
shown an angle measument icon on the main screen
when this feture activated.
4.3.2. Katsayılar / Coefficients
Lineer olmayan bantlar için linearizasyon katsayıları
kullanılır. "Minimum Debi" ile "Katsayı1" değeri ,
"Maksimum Debi" ile "Katsayı2" değeri ilişkilidir. Ara
değerler ise lineer olarak hesaplanırlar.
Linearization coefficients are used for non-linear bands.
There is a relation between "Minimum Flow" and
"Coefficient1" and a relaton between "Maximum Flow"
and "Coefficient2". Intermediate values are calculated
linearly.
4.3.2.1.
Minimum Debi / Minimum Flowrate
Cihazın kullanılacağı minimum debi değerdir. Bu
değerin altına inildiğinde ekranda "MIN" ibaresi belirir.
The minimum flow rate that the device can run. When
this value is lowered, "MIN" appears on the display.
4.3.2.2.
Maksimum Debi / Maximum Flowrate
Cihazın kullanılacağı maksimum debi değerdir. Bu
değerin üzerine inildiğinde ekranda "MAK" ibaresi
belirir.
The maximum flow rate to be used by the device.
When this value is lowered, "MAX" appears on the
display.
4.3.2.3.
Katsayı1 / Coefficient 1
"Minimum Debi" parametresindeki debi değeri
izlendiğinde kullanılacak katsayı değeridir. Hesaplanan
ağırlık değeri bu parametrede belirlenen değer ile
çarpılarak toplama eklenir.
The value of the coefficient to be used when the flow
rate in "Minimum Flow" parameter is monitored. The
calculated weight value is multiplied by the value
determined in this parameter and added to the sum.
4.3.2.4.
Katsayı2 / Coefficient 2
"Maksimum Debi" parametresindeki debi değeri
izlendiğinde kullanılacak katsayı değeridir. Hesaplanan
The value of the coefficient to be used when the flow
rate in "Maximum Flow" parameter is monitored. The
Debi / Flowrate
Katsayı /Coefficient
DebiMin
Min.Flow
DebiMaks
Max.Flow
Katsayı2 /Coefficient2
Katsayı1 /Coefficient1
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 14
ağırlık değeri bu parametrede belirlenen değer ile
çarpılarak toplama eklenir.
calculated weight value is multiplied by the value
determined in this parameter and added to the sum.
4.3.3. Sıfırlama / Zero Setting
4.3.3.1.
Sıfır Bölge [kg] / Zero Zone [kg]
İlgili belirtilen değerin altında ağırlık gözlendiğinde
cihaz toplama yapmaz. Ancak bu değer dara ya da sıfır
yerine geçmez.
The device does not totalize when the weight below
the specified value is observed. However, this value
does not replace tare or zero.
4.3.3.2.
Sıfır Süresi [sn] / Zero Time [sc]
Bant üzerindeki yük Sıfır Süresi kadar bir süre
kapasitenin %2 sinde aşmaz, bant sıfırı yeniden
tanımlanmış olur. (Kalibrasyon sıfırı gibi düşünülebilir.
Sıfır Bölge değeri sıfırdan farklı ise sıfır süresi boyunca
Sıfır Bölge değerinin altında kalınması yeterlidir.
When the load on the belt does not exceed 2% of the
capacity for a period of Zero Times, the band zero is
redefined. (Calibration can be evaulated as calibration
zero. If the Zero Range parameter is not zero, it is
sufficient to stay below the Zero Range value for the
duration of Zero Time.

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 15
4.4. Kalibrasyon /Calibration
4.4.1. Titreşim / Vibration
Sistem titreşimlerini gidermek için kullanılır. Standart
olarak 4 seçiniz. Değer büyüdükçe filtreleme oranı
artmaktadır.
It is used to eleminate system vibrations. Select 4as
standard. The filtration rate increases when this
parameter increased.
4.4.2. Bant Tur Süre [sn] / BeltRev.Time [sc]
Kalibrasyon işlemleri bir bant boyu süresince
gerçekleştirilecek olup bandın bir tam turu süresi
saniye olarak bu parametrede belirtilir. Bandın dönüş
hızına göre 1 tam turu tamamladığı süre ölçülerek
mümkünse 3 bant turu süresi (daha doğru kalibrasyon
yapılabilmesi için) bu parametreye girilmelidir.
The calibration process will be performed during belt
running. A full turn cycle of the band is specified in
this parameter in seconds. It is necessary to measure
the time of completing 1 full tour according to the
rotation speed of the band, and to enter this
parameter for 3 band tour times (for more accurate
calibration).
4.4.3. SıfırKalibr. / Zero Calibration
Bandın boş formunun cihaza tanıtılması işlemidir.
Bandın boş ve üzerinden malzeme geçişi olmadığına
emin olunuz ve sıfırlama işlemi boyunca müdahale
edilmemesini sağlayınız. Bant tur süresi boyunca cihaz
bandın formunu öğrenecektir.
The empty belt point definition of the scale. Make sure
that the band is empty and that no material passes
through it, and that it is not interfered with during the
zeroing process. During the tape tour, the device will
learn the form of the band.
4.4.4. Yük Kalibr. / Load Calibration
Bant üzerine konulacak referans ağırlığın cihaza
tanıtılması işlemidir. Bant tur süresince kalibrasyon
işlemi devam eder.
The process of introducing the reference weight to be
placed on the tape to the device. The calibration
process is continued during the BeltRev.Time.
4.4.5. mV/V Test / mV/V Test
Yük hücresinden elde edilen mV/V ham ölçüm
değerlerinin gözlenebildiği menüdür. 1.000000 mV/V
olarak gözlenmesi %50kapasite ile yüklenmiş anlamı
taşır.
In this menu the Loadcell mV/V internal value can be
monitored. If there is a value of 1.000000 mV/V, it
means that the load on the loadcell is about 50%.
4.4.6. Debi Filtre / th Filter
Debi hesabında kullanılır. Buradaki filtre oranında anlık
debi filtrelenerek hesaplanır. Standart olarak 5 seçiniz.
It is used in flow calculation. This is calculated by
filtering the instantaneous flow rate at the filter ratio.
Select 5 as standard.
4.5. Haberleşme Ayarları /Comm Setup
Haberleşme ayarları menüsüdür. Cihazın iki ayrı seri
haberleşme portu vardır. Her bir port ayarları aşağıda
verilmiştir.
Communication settings menu. The device has two
serial communication ports. The settings for each port
are given below.
4.5.1. Comm1 / Comm1
Birinci haberleşme portu ayarlarıdır. Ek haberleşme
arayüz (RS232/485) seçimi için Jumper ayarları
başlığına bakınız.
The first communication port settings. For selection of
additional communication interface (RS232 / 485),
please refer to the header of jumper settings.
4.5.1.1.
Modbus No / Modbus ID
Modbus haberleşme durumunda cihaz Modbus kimlik
numarasıdır. (1-99)
In Modbus communication, devices Modbus ID
number. (1-99)
4.5.1.2.
Rtu/Ascii / Rtu/Ascii
Modbus haberleşme durumunda cihaz haberleşme tipi
seçimidir. RTU ya da ASCII seçenekleri vardır.
Device communication type selection in case of
Modbus communication. RTU or ASCII options are
available.
4.5.1.3.
Baudrate / Baudrate
İlgili port için haberleşme hızı seçimidir.
1200/2400/4800/9600/19200/33600/57600/115200bps
hızları seçilebilirdir.
The communication speed for the corresponding port is
the selection. Speeds of
1200/2400/4800/9600/19200/33600/57600 /
115200bps can be selected.
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 16
4.5.1.4.
Seri Çıkış / Comm Out Val
İlgili haberleşme portunun işlevi seçimidir. Seçilen
işleve göre çalışır. t/h, m/s, kg/m ve Modbus işlevleri
seçilebilirdir.
The function of the corresponding communication port
is selected. Works according to the selected job. T / h,
m / s, kg / m and Modbus functions can be selected.
4.5.2. Comm2 / Comm2
4.5.2.1.
Baudrate / Baudrate
İlgili port için haberleşme hızı seçimidir.
1200/2400/4800/9600/19200/33600/57600/115200bps
hızları seçilebilirdir.
The communication speed for the corresponding port is
the selection. Speeds of
1200/2400/4800/9600/19200/33600/57600 /
115200bps can be selected.
4.5.2.2.
Seri Çıkış / Comm Out Val
İlgili haberleşme portunun işlevi seçimidir. Seçilen
işleve göre çalışır. t/h, m/s, kg/m ve Modbus işlevleri
seçilebilirdir.
The function of the corresponding communication port
is selected. Works according to the selected job. T / h,
m / s, kg / m and Modbus functions can be selected.
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 17
4.6. Çıkış Ayarları / Output Setup
4.6.1. Röle Çıkışları / Relay Outputs
Röle çıkışlarının ayarlandığı bölümdür.
It is the section where the relay outputs are set.
4.6.1.1.
Pulse Çıkış / Pulse Out KG
Belirlenen ağırlık miktarı kadar malzeme geçişi
gözlendiğinde 1 nolu röle çıkışı 500ms süresince
enerjilenir ve daha sonra tekrar eski konumuna döner.
Pulse çıkışını silebilmek içim Toplam1 silinmelidir ya da
Pulse Çıkış parametresi yeterince yüksek değer
verilmelidir. Mekanik sayaçlar için ya da PLC
sistemlerine toplam bilgisi aktarılması için kullanılır.
When the material passes by the specified weight
amount, Relay1 output is energized for 500ms and
then returns to its original position. To clear the pulse
output, Sum1 must be cleared or the Pulse Output
parameter must be set high enough. It is used for
transferring total information to the mechanical meters
or PLC systems.
4.6.1.2.
Yığın Kontrol / BatchControl
Yığın kontrol, belirli bir miktar malzemenin bant
üzerinden otomatik olarak transfer edilebilmesine
yarar. "Start" girişi aktif edilerek işlem başlatılır. 2 nolu
röle enerjilenerek aktarım başlatılır. Bu parametrede
belirlenen miktar kadar malzeme geçtikten sonra ise
otomatik olarak yığın çıkışı kapatılır.
Batch control allows a certain amount of material to be
automatically transferred over the blet. When the
"Start" input is activated, the process is started. Relay
2 is energized and transmission is started. After the
amount of material in this parameter has passed, the
Batch output is automatically turned off and stops the
system.
4.6.1.3.
Röle Alarm Min / Relay Alarm Min
Alarm rölesi (Röle-4) herhangi bir hata durumunda
enerjilenir. Aynı zamanda ağırlık değeri bu değerin
altında ise de hata vermesi sağlanır. PID ayarlarındaki
AlarmGecikmeZamanı kadar gecikmelidir (min 2sn)
Alarm relay (Relay4) energized under error condition.
If weight is under minimum value, error output is
given. Alarm is delayed according to the delay setting
in PID settings alarmDelayTime (minimum 2seconds).
4.6.1.4.
Röle Alarm Maks / Relay Alarm Max
Alarm rölesi (Röle-4) herhangi bir hata durumunda
enerjilenir. Aynı zamanda ağırlık değeri bu değerin
üzerinde ise de hata vermesi sağlanır. PID ayarlarındaki
AlarmGecşkmeZamanı kadar gecikmelidir (min 2sn)
Alarm relay (Relay4) energized under error condition.
If weight is over the maximum value, error output is
given. Alarm is delayed according to the delay setting
in PID settings alarmDelayTime (minimum 2seconds).
4.6.2. Analog Cıkış / Analog Out
Analog çıkış ayarlarının yapıldığı menüdür
Menu where analog output settings are made
4.6.2.1.
Analog Mode / Analog Mode
Analog çıkışın çalışacağı mod belirlenir. Debi, hız ve
Besleyici seçenekleri vardır. Debi seçildiğinde Analog
çıkış debiye göre, hız seçildiğinde Anaolg çıkış hıza göre
değişecektir.
The mode in which the analogue output will operate is
determined. There are flow, speed and feeder options.
When the flow rate is selected, the Analog output will
be changed according to the output speed.
4.6.2.2.
Hedef Debi / Target Flow
Analog çıkışın debiye göre olması durumunda
maksimum analog çıkışın verileceği debi değeridir.
Örneğin 100t/h lik bir sistemde 100t/h olarak girilir ve
bu debide maksimum analog çıkış üretilir. Besleyici
seçildiğinde ise hedef debi bilgisidir.
The flow rate at which the maximum analogue output
will be given if the analogue output corresponds to the
output. 100 t / h in a system of 100 t / h is entered as
the output and this is the maximal analog output is
produced. Used as target flowrate when feeder is
selected
4.6.2.3.
An.Hız.Maks / Target Speed
Analog çıkışın hıza göre olması durumunda maksimum
analog çıkışın verileceği hız değeridir. Öreneğin
1.5000m/s lik bir sistemde 1.50000m/s olarak girilir ve
bu hızda maksismum analog çıkış üretilir.
If the analogue output is relative to the speed, the
speed value at which the maximum analogue output
will be given. The input is 1.50000m / s in a system of
1.5000m / s and the maximal analog output is
produced at this speed.
4.6.2.4.
An.Katsayı / An.Out.Coefficient
Analog çıkışı kalibre etmek amacıyla kullanılır. Burada
katsayı ile çarpılarak analog çıkış üretilir. Herhangi bir
anda 1.000 katsayısına karşılık 6V olarak çıkış
alınıyorken katsayı 0.500 olarak değiştirilir ise çıkış
değeri 3V olarak değişecektir.
It is used to calibrate the analogue output. Here, the
analog output is produced by multiplying by the
coefficient. If the output is 6V for any coefficient of
1.000 and the coefficient is changed to 0.500 while the
output is changed, the output value will change to 3V.
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 18
4.6.2.5.
An.Başlangıç / Analog From
Analog çıkışı başlangıç değerini ayarlamak için
kullanılır. Volt birimi olarak 0-10.000 aralağında
değerler girilebilirdir. 0/20mA ya da 0/10V çalışma için
"00.000" olarak girilmelidir. 04.000mA ofset vermek
için 02.000V olarak ayarlanır. mA değeri girilen Volt
değerin iki katı olarak çıkışa yansır.
(02.000V = 04.000mA, 10.000V = 20.000mA)
It is used to set analog output start point. The values
can be entered as Voltage unit between 0 and
10.000V. Can be set.Use as "00.000V" for 0/20mA or
0/10V range. To set 04.000mnA ofset, use as 02.000V.
Current (mA) output is 2times of the Voltage value
entered.
(02.000V = 04.000mA and 10.000V=20.000mA)
4.6.2.6.
An.Bitiş / Analog To
Analog çıkışı bitiş değerini ayarlamak için kullanılır. 0-
10.000 aralağında değerler girilebilirdir. Analog çıkış
tipi debi olarak ayarlandığında çıkış debiye oranlı olarak
çalışır. Maksimum Debi parametresinde belirtilen
Debi değeri gözlendiğinde yapılacak çıkış değeridir.
It is used to set analog output End point. The values
between 0 and 10.000 can be set. If analog output
relation is set as Flowrate, the analog output Works as
linear to the actual flowrate. This parameter set the
output value when the flowrate is equal to
MaximumFlowrate parameter (On Coefficients side).
4.6.3. PID Ayarlar / PID Settings
Analog Çıkış için PID çıkış ayarlarının yapıldığı
menüdür. Sadece Besleyici Bant Kantarlarında
işlkevseldir.
Menu where PID parameters for analog output settings
are made. These settings are used on WeightFeeder
devices only.
4.6.3.1.
P Katsayı / P Coefficient
Analog çıkış tipi olarak "Besleyici" seçildiği durumda
PID kontrol için P (Oransal) katsayıdır. 0.500000
seçiniz
*Sadece WF tipi cihazlarda geçerlidir.
When Feeder option selected as Analog Output Type
then used P (Proportional) coefficient parameter for
PID control. Choose 0.500000 by default
*Only available for WF type devices.
4.6.3.2.
I Katsayı / I Coefficient
Analog çıkış tipi olarak "Besleyici" seçildiği durumda
PID kontrol için I (İntegral) katsayıdır. 0.0500000
seçiniz.
*Sadece WF tipi cihazlarda geçerlidir.
When Feeder option selected as Analog Output Type
then used I (Integral) coefficient parameter for PID
control. Choose 0.050000 by default
*Only available for WF type devices.
4.6.3.3.
Örnekleme Zamanı [ms] / Integ.Sample [ms]
Analog çıkış tipi olarak "Besleyici" seçildiği durumda
PID kontrol için I (İntegral) örnekleme zamanıdır.
200ms seçiniz.
*Sadece WF tipi cihazlarda geçerlidir.
When Feeder option selected as Analog Output Type
then used I (Integral) coefficient parameter for PID
control. Choose 200ms by default
*Only available for WF type devices.
4.6.3.4.
Alarm Gecikmesi [sn] / AlarmDlyTime [sc]
Analog çıkış tipi olarak "Besleyici" seçildiği durumda
PID kontrol için alarma geçme evvelsi bekleme
süresidir. Alarm yok ise 0 kullanılır
*Sadece WF tipi cihazlarda geçerlidir.
When Feeder option selected as Analog Output Type
then used delay time for alarm output. Choose 0s by
default to deactivate.
*Only available for WF type devices.
4.6.3.5.
Alarm Minimum / Alarm Min
Analog çıkış tipi olarak "Besleyici" seçildiği durumda
PID kontrol için Alarm verme alt % değeridir.
*Sadece WF tipi cihazlarda geçerlidir.
When Feeder option selected as Analog Output Type
then used Alarm Low limit value in %.
*Only available for WF type devices.
4.6.3.6.
Alarm Maksimum / Alarm Max
Analog çıkış tipi olarak "Besleyici" seçildiği durumda
PID kontrol için Alarm verme üst % değeridir.
*Sadece WF tipi cihazlarda geçerlidir.
When Feeder option selected as Analog Output Type
then used Alarm High limit value in %.
*Only available for WF type devices.
4.7. Analog Giriş / Analogue Input
4.7.1. Analog Giriş / Analogue Input
Besleyici Bant Kantarlarında kullanılır. İlgili opsiyona
göre analog girişin değerine göre oransal olarak çıkış
set debisi uygulanır. Örneğin Set debi 100.0t/s ise 5V
analog giriş için 50t/s debi yakalanacak şekilde PID
çıkış verilir.
It is used in WeighFeeder Scales. According to the
relevant option, the output set flow rate is applied
proportionally according to the value of the analog
input. For example, if Set Flowrate is 100.0t/h, PID
output is given as 50t/h flowrate when 5V analog input
applied.
LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 19
4.8. Servis / Service
Servis menüsüdür. Cihaz fonksiyonları test etmek için
kullanır.
It is the service menu. The device uses it to test
functions.
4.8.1. Yük Hücre Test / Loadcell Test
Genel durum izleme ve yük hücresi test menüsüdür.
Yük hücresi değeri mV/V olarak gözlemlenebilir.
Genelllikle 0-2.000mV/V aralığında olmalıdır.
2.000mV/V aşıldığında yük hücresi kalıcı olarak zarar
görebilir!
Analog giriş, dijital girişlerin ve dijital çıkışların değerleri
ekranda gözlenebilir (ilgili çıkışlar haberleşme
üzerinden set ediliyor olabilir)
General condition monitoring and loadcell test menu.
The loadcell value can be observed as mV/V. Usually it
should be in the range of 0-2.000mV/V. Exceeding
2.000mV/V can permanently damage the loadcell!
The values of analog input, digital inputs and digital
outputs can be observed on the screen (related
outputs may be set via communication)
4.8.2. Enkoder Test / Encoder Test
Enkoder test menüsüdür. Test edilen enkoder belirli bir
mesafe hareket ettirilir. İlerleme mesafesi ve alınan
darbe sayısı ekranda gösterilecektir. Kullanılan enkoder
bilgileri ile ve hareket ettirilen mesafe eşdeğer
olmalıdır. Değil ise enkoder adım mesafesi parametresi
uygun oranda değiştirilir.
It is the encoder test menu. The encoder under test is
moved a certain distance. The travel distance and the
number of pulses received will be displayed on the
screen. The encoder information used and the distance
moved must be equivalent. If not, the encoder step
distance parameter is changed at the appropriate rate.
4.8.3. Çıkış Test / Outputs Test
Röle çıkış testinin yapıldığı bölümdür. Kazara çıkış
verilmemesi için Menüye girildiğinde Hayır olarak seçili
gelir. Evet olarak seçilerek onaylandıktan sonra Fx
tuşuna basarak çıkış numarası değiştirilir ve ilgili çıkışta
24V olup olmadığı kontrol edilir. Test esnasında
ekranda gösterilen çıkış aktif olur, diğerleri
enerjilenmez.
This is the section where the relay output test is
performed. It is selected as No when entering the
menu to avoid accidental output. After it is confirmed
by selecting Yes, the output number is changed by
pressing the Fx key and it is checked whether there is
24V at the relevant output. During the test, the output
shown on the screen becomes active, the others are
not energized.
4.8.4. Haberleşme Test / Comm Test
Haberleşme hattından bilgi gelip gelmediği kontrolü için
kullanılır. Hyper terminal ya da putty gibi terminal
yazılımları ile „A‟, „B‟, „C‟ gibi karakterler gönderilerek
aynı karakter gözlenmelidir. Özellikle hatalı baudrate ve
uzak iletim hatlarında test için kullanılır.
It is used to control whether information is coming
from the communication line. By sending characters
such as 'A', 'B', 'C' with terminal software such as
hyper terminal or putty, the same characters should be
seen. It is mainly used for testing wrong baudrate and
remote transmission lines.
4.8.5. Fabrika Ayar / Factory Settings
Fabrika ayarlarına dönmek için kullanılır.
Used to restore the factory settings.
4.8.6. Ver. Güncelle / Version Update
Versiyon güncelleme durumunda kullanılır. Evet
seçildikten sonra PC yazılımı ile güncelleme yapılır.
Version upgraging feature. After "Yes" is selected then
the update operation can be start with the PC
software.

LPR-200 Kullanım Kılavuzu / LPR-200 User Manual v1.0.33 20
5. Periyodik Bakım / Periodic Maintenance
Bant mekaniğinin zamanla yıpranması ya da ek
yapılması nedeniyle ağırlığı (dolayısıyla sıfır
kalibrasyonu) değişecektir. Bant gergisi değişmesi ve
ruloların birbirleriyle olan yükseklik farkının değişmesi
de en büyük etmendir. Bu nedenle periyodik bakım ve
kalibrasyon kontrolü yapılıdır. Bu periyodik bakım
normalde ayda bir iken bazı kuruluşlarda haftada iki
kez yapılabilmektedir.
The weight (and therefore the zero calibration) will
change as band mechanics wear over time or are
added. The change in the belt tension and the
difference in height of the rolls are the most important
factors. Therefore, periodic maintenance and
calibration control is done. This periodic maintenance
can normally be done once a month and in some
establishments twice a week.
5.1. Periyodik Mekanik Kontrol / Periodic Mechanic Check
Tartı rulosunun yüksekliği sol ve sağındaki rulolar ile
aynı olmalıdır. Bu amaçla sol ve sağındaki ruloların
kenarlarından bir ip çekilerek yükseklik kontrolü
yapılabilir. Aynı yükselikte olmasını sağlayınız.
The height of the weighing roller should be the same
as the left and right rolls. For this purpose, height
control can be done by pulling a rope from the edges
of the rolls on the left and right. Make sure it is at the
same height.
5.2. Periyodik Kalibrasyon / Periyodik Calibration
Bant üzerinde sürekli negatif ya da pozitif yük
gözleniyor ise Sıfır Kalibrasyonu yapılır.
Sıfır kalibrasyonu yapıldıktan sonra toplam geçen
malzeme miktarında hata oluyorsa Katsayı düzeltmesi
yapılır (Yük kalibrasyonuna gerek yoktur)
Zero Calibration is performed if a negative or positive
Load is observed on the belt.
If there is an error in the total amount of material after
the zero calibration has been made, correction of the
Coefficients is made (Lo Load calibration required)
5.2.1. Sıfır Kalibrasyonu / Zero Calibration
Bandın boş dönmesi esnasında sürekli olarak pozitif ya
da negatif yük (debi) izleniyorsa Sıfır Kalibrasyonu
yapılmalıdır.
Sıfır kalibrasyonu Kalibrasyon ana başlığı altındadır ve
bant dönerken yapılır. Doğru bir kalibrasyon için gerekli
süre (“Bant tur süresi” olarak girilen süre) bandın bir
tam turuna karşılık gelen süre olmalıdır.
Bant boşta dönerken Sıfır Kalibrasyonu başlatılır.
Kalibrasyon süresi boyunca banda dokunulmamalı ve
malzeme geçişi olmamalıdır.
Kalibrasyon sonrası geçen malzeme miktarı ve debi sıfır
olarak izlenebilmelidir. Uzun ve ekli tip bantlarda ve
titreşimli yerlerde bant sıfırı görülemeyebilir. 3-5dk lık
çalışma sonunda toplamın değişmemesi doğru sıfır
kalibrasonu yapıldığını gösterir.
Zero Calibration should be performed if a positive or
negative charge (flow) is continuously monitored
during the empty rotation of the belt.
Zero calibration is under the Calibration main heading
and is performed while the band is rotating. The time
required for the correct calibration (the time entered
as the ın Band lap time en) must be the time
corresponding to a full cycle of the band.
Zero Calibration is initiated when the band is idle.
During the calibration period, the belt should not be
touched and no material should be passed.
After calibration, the amount of material and flow rate
should be monitored as zero. The band zero may not
be seen in long and attached type bands and vibrating
places. If the sum does not change at the end of 3-5
minutes, it shows that the zero calibration is
performed.
Table of contents
Other e-tarti Scale manuals


















