Reference Manual epc10x
Table of Contents
1. Introduction.................................................................................................................................................... 3
2. Light Curtain Principle..................................................................................................................................
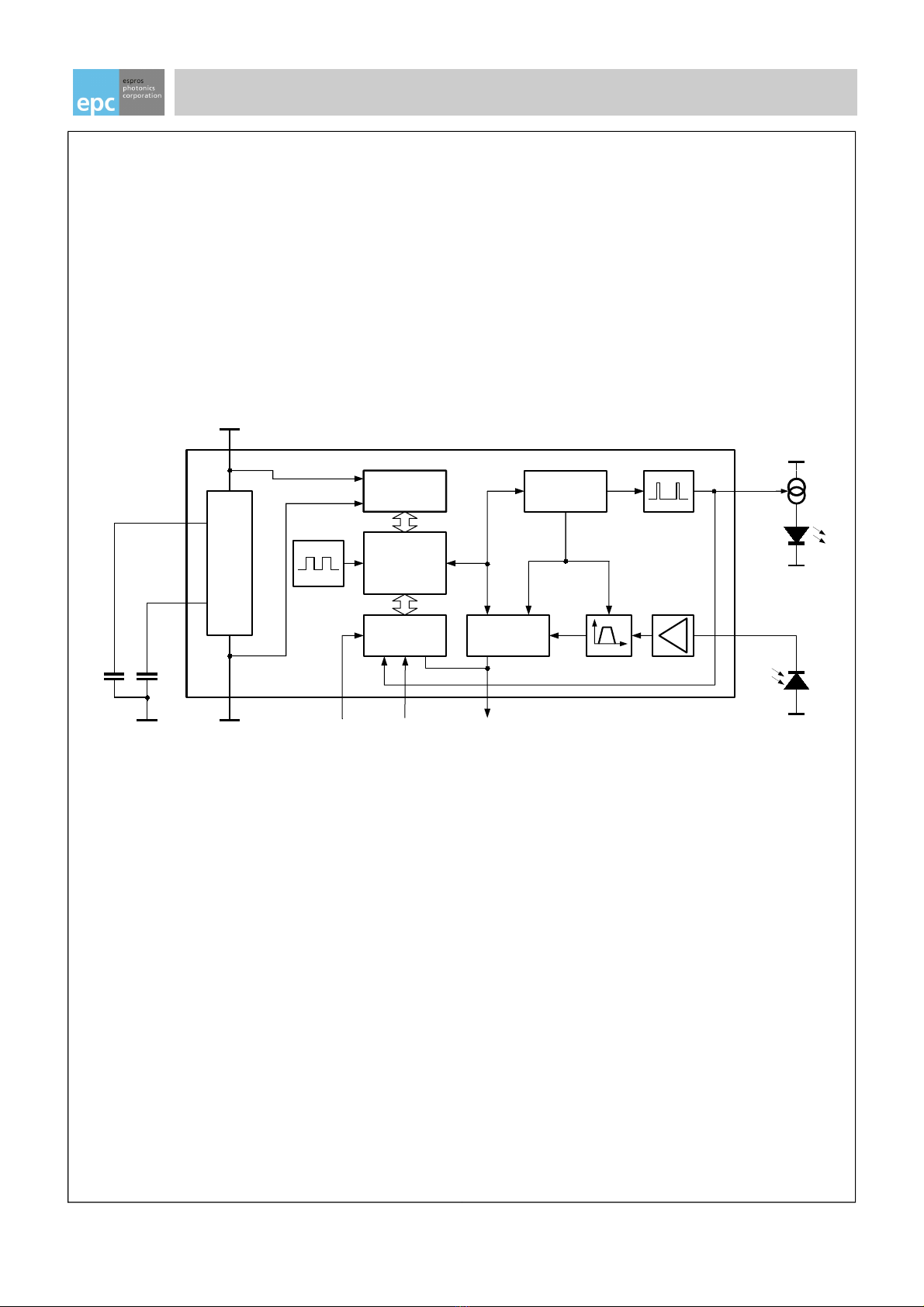
2.1 System Overvie ........................................................................................................................................................................................... 4
2.2 Light Curtain Receiver Edge..........................................................................................................................................................................6
2.3 Light Curtain Emitter Edge.............................................................................................................................................................................6
3. 2-Wire Bus...................................................................................................................................................... 7
3.1 General Description....................................................................................................................................................................................... 7
3.2 Bus Wire Considerations............................................................................................................................................................................... 8
3.3 Bus Signal Waveform.................................................................................................................................................................................... 9
. Parameter Memory...................................................................................................................................... 10
4.1 Receiver Parameters (epc100)....................................................................................................................................................................11
4.2 Sample Receiver Parameter Setting........................................................................................................................................................... 13
4.3 Transmitter Parameters (epc101)................................................................................................................................................................14
4.4 Sample Transmitter Parameter Setting....................................................................................................................................................... 16
5. Timing........................................................................................................................................................... 17
5.1 Overvie ...................................................................................................................................................................................................... 17
5.2 Timing Details.............................................................................................................................................................................................. 17
5.3 Special Cases.............................................................................................................................................................................................. 18
6. SPI Interface................................................................................................................................................. 19
6.1 Timing Specifications...................................................................................................................................................................................19
6.2 General Description..................................................................................................................................................................................... 19
6.3 Command List..............................................................................................................................................................................................20
6.4 Detailed Command Descriptions................................................................................................................................................................. 21
7. Address Programming................................................................................................................................ 2
7.1 General Description..................................................................................................................................................................................... 24
7.2 Programming Procedure..............................................................................................................................................................................25
8. Considerations for Safety Applications..................................................................................................... 26
8.1 Data Integrity on the 2-Wire Po er-Bus...................................................................................................................................................... 26
8.2 Residual Error Rate..................................................................................................................................................................................... 26
8.3 Error Cases..................................................................................................................................................................................................26
8.4 Error Codes..................................................................................................................................................................................................26
© 2012 ESPROS Photonics Corporation
Characteristics subject to change without notice
Page 2/26 Reference Manua epc100 - V2.2