GSK SJT series AC servo motor
2
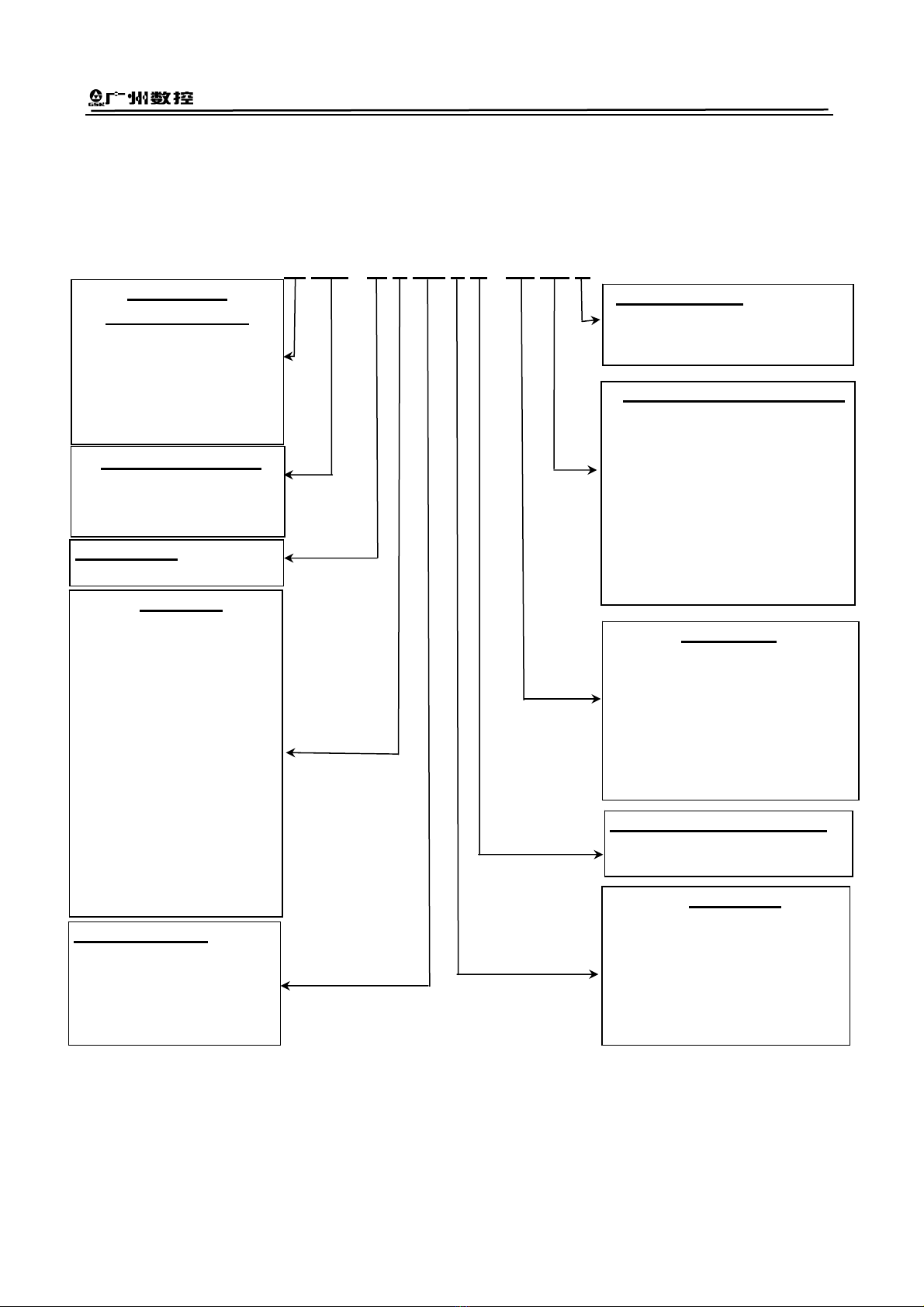
ⅢMODELS of the MACHINE
Example: 80SJT
-
MZ032EH(A4Y1X)
80 SJT - M Z 032 E H(A□Y□X)
Dimension for
installing the flange:
60
80
110
130
150
175
AC servo motor series
SJT Common
SJTG
High precision & speed
SJTR
Dedicated for the robot
Safe brake:
None None
Z Available
Remark: When the power
supply of the safe brake is
DC. (0.9~ 1.1 )×24V, the
interface is 3-cord socket,
the pins 1 and 2 are power
supply terminals (without
pole), pin 3 is the earth one.
When pins 1 and 2 are
connected with the power
supply, the brake doesn’t
operate,; when the power
supply is OFF, it operates.
The safe brake operation
time≤0.1s.
Connection mode
None Industrial (aviation) socket
type
X Cable direct t
e
Shaft end or installation config.
None: Standard shaft end
Y□Special cylinder shaft end
Z□Special cone shaft end
S□Stepped motor installation
configuration
Remark:The digit code is in “□” ,
about the number representing
the special shaft end, refer to the
installation overall figure of the
motor.
Encoder type
A or none Incremental 2500p/r
A1
A2 Incremental 5000p/r
A3 Incremental split-type 2500p/
A4 Absolute 17bit
A4ⅠAbsolute 17bit, Biss treaty
A4ⅡAbsolute 17bit, Smart-Abs
treaty
Rated speed
A 1000 r/min
B 1500 r/min
C 2000 r/min
D 2500 r/min
E 3000 r/min
F 3500 r/min
G 4000 r/min
Zero-speed torque
Remark: It is represented
by three digits, and its value
is in three digits ×10-1 and
its unit is N·m.
Example: 032×10-1=3.2N·m
Input voltage of the drive unit
None 220V
H 380V
Feedback unit
M Photoelectric encoder