3
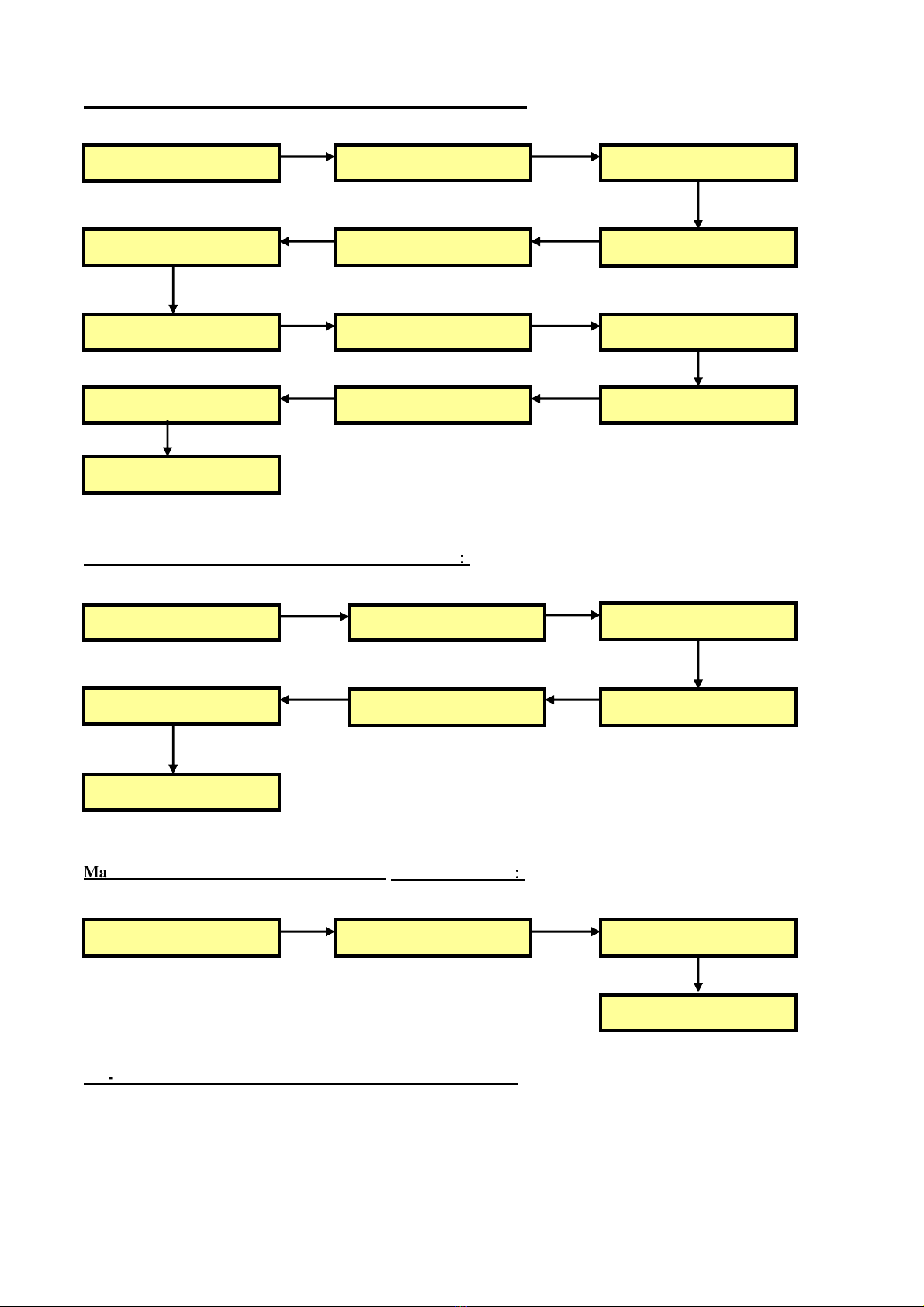
Please perform the following steps, to install the Turnigy® V-Bar 600.
●A rigid rotor head has no flybar, no washout assembly and no pitch mixer arms.
You must have a flybarless head with proper geometry installed
●Install Turnigy® V-Bar 600 correctly as illustrated above.
●Connect Turnigy® V-Bar 600 to receiver. Don not connect the servos to the Turnigy® V-Bar 600 at this
time.
●Ensure that the transmitter trims and sub-trims are set to zero, and that collective pitch to tail pitch mixing
is disabled.
●Ensure the swashplate type of transmitter is H1.
●Adjust the rudder, pitch, aileron and elevator servo travel (ATV, end point) to +/-100% in your transmitter.
●Set a gain switch in your transmitter for switching flight mode.
●Refer to the following LCD Setting Adaptor guide for detailed setting .
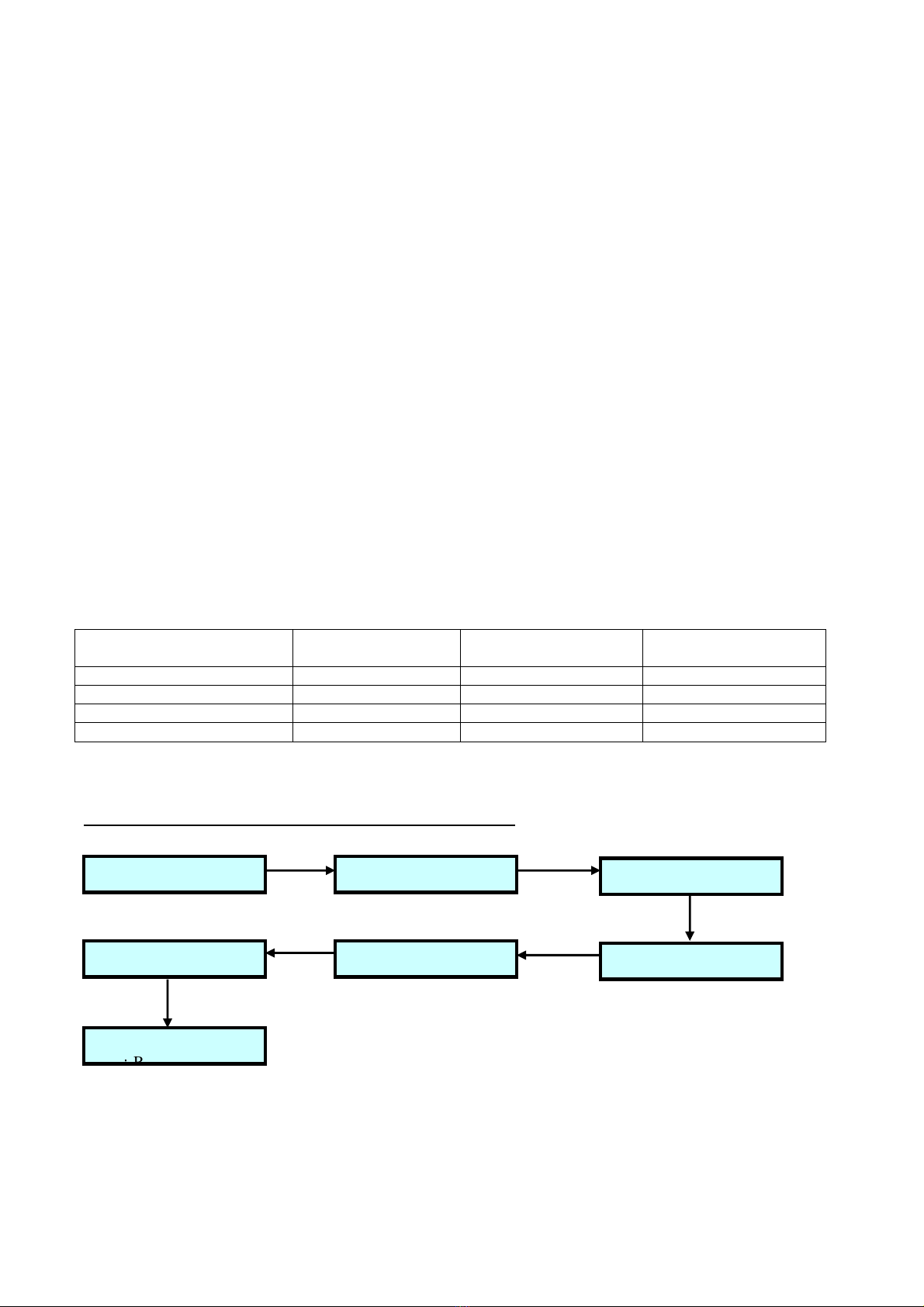
●Connect the servos(rudder,aileron, elevation,pitch) to Turnigy® V-Bar 600.
●Set the gain in your transmitter so that the Turnigy® V-Bar 600 is in memory bank 0, see page 5 before
continuing
●Set tail gyro gain in Turnigy® V-Bar 600 to be in normal mode (heading hold off).
●Select “READ DATA” menu and read the data under the flight mode
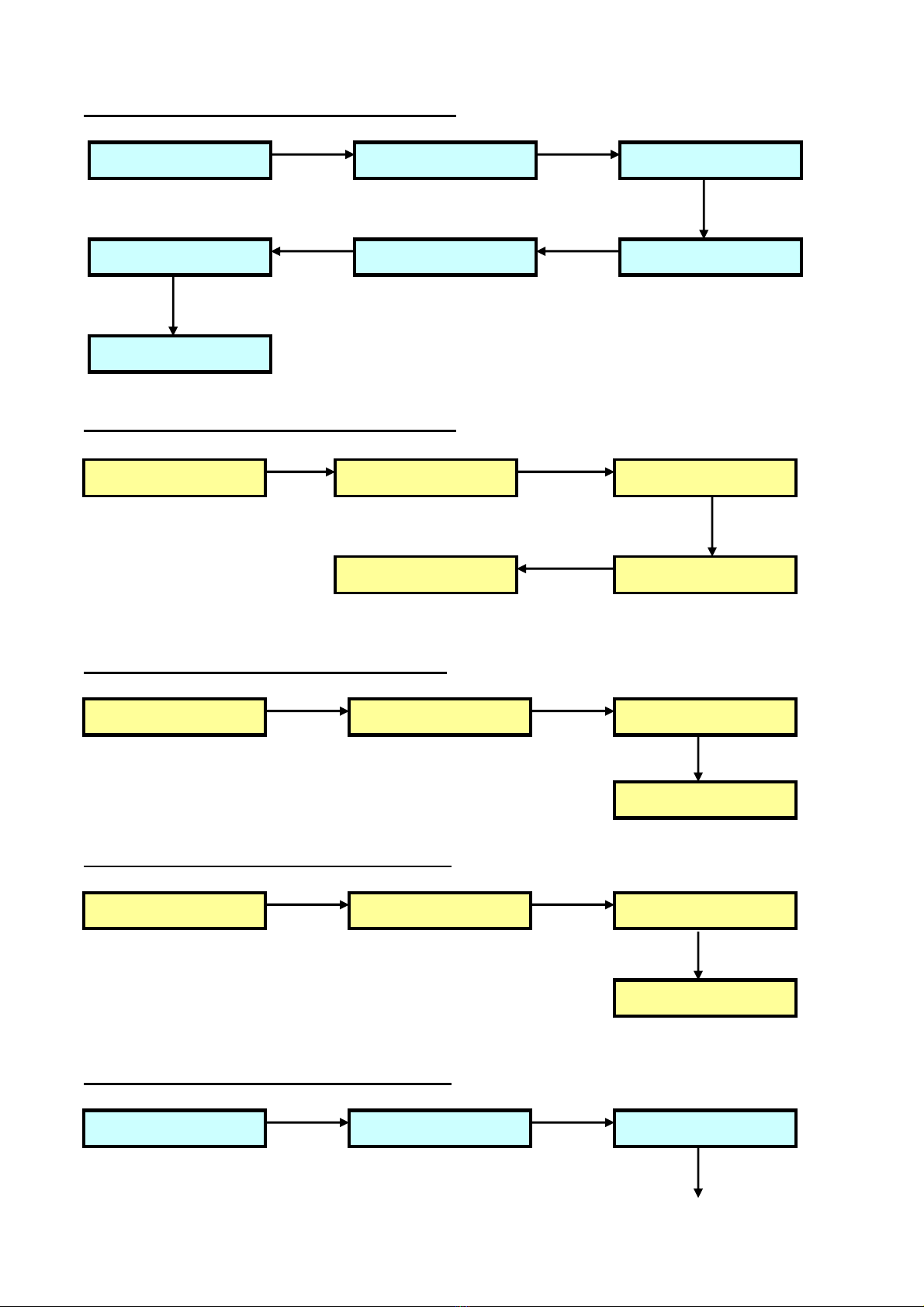
●If you switched gain switch, you must select “READ DATA” menu and read the data under the flight
mode.
●Rudder servo is in normal mode. Perform mechanical adjustment of the rudder servo horn and control
linkages to achieve approximately 8deg tail pitch.
●Confirm correct relationship of rudder stick and Turnigy® V-Bar 600 response to tail movement. Confirm
there is no mechanical binding.
●Confirm correct relationship of aileron stick and Turnigy® V-Bar 600 response to swashplate movement.
Confirm there is no mechanical binding.
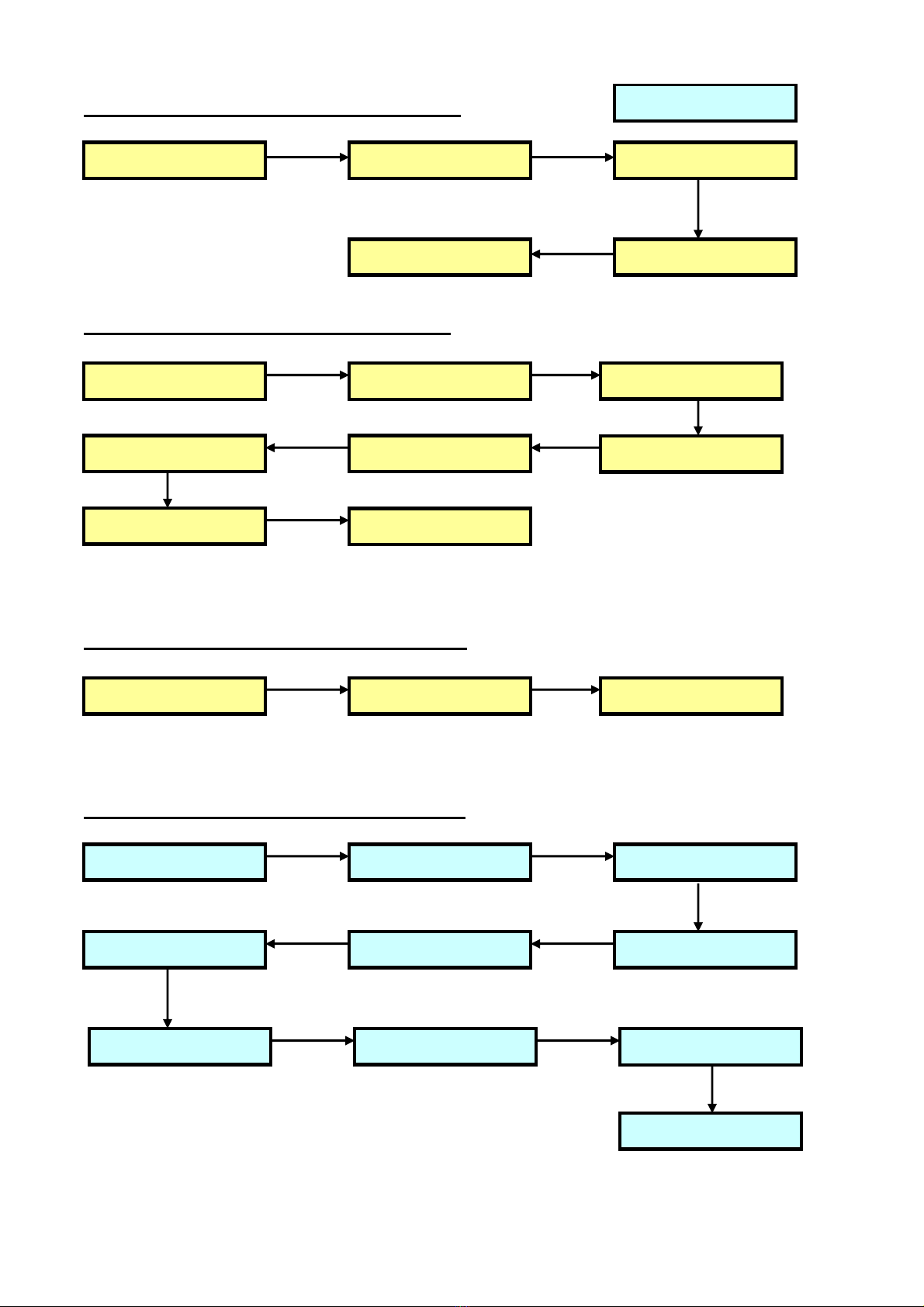
●Confirm correct relationship of elevation stick and Turnigy® V-Bar 600 response to swashplate
movement. Confirm there is no mechanical binding .
●Confirm correct relationship of pitch stick and Turnigy® V-Bar 600 response to swashplate movement.
Confirm there is no mechanical binding.
In order to determine Turnigy® V-Bar 600’s Neutral Point, please don’t move the helicopter for
3 seconds
after powering on. Bind Turnigy® V-Bar 600 tightly with Velcro, avoiding that the helicopter body is
vibrated to cause Turnigy® V-Bar 600's shake.
Power up Turnigy® V-Bar 600, and connect with LCD programmer.
Status LED:
During normal operation the LED provides simple status information for users.
On
:
AVCS and Normal mode. Rudder stick at neutral.
Off
:
Error. Gyro not receiving valid signal from the receiver or unable to calibrate
because the rudder stick is not centred.
LCD Setting: