2Operation manual geodyna 2350 - 9413 126
Contents ·Safety rules and function
Contents Page
1. Safety rules and function 2.........................
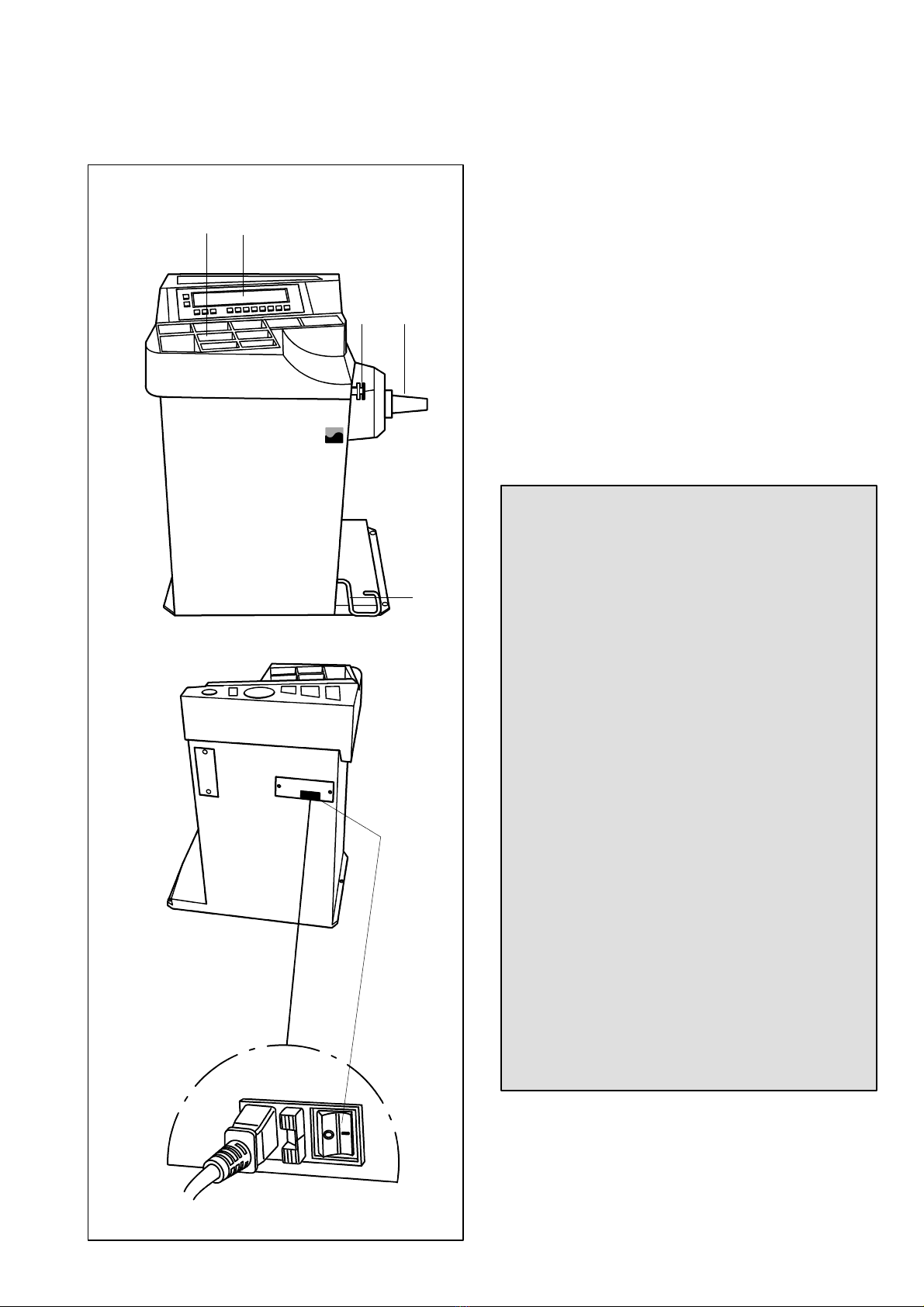
2. Installation of the machine 5........................
3. Electrical connection 7.............................
4. Controls and displays 8............................
5. Turning on the machine 14.........................
6. Clamping the wheel 16.............................
7. Entry of balancing mode and wheel size 18...........
8. Balancing the wheel 28............................
9. Hidden spoke placement 32........................
10. Changing modes of operation 35....................
11. Error codes 42....................................
12. Pro-Match/weight minimisation 48...................
13. User calibration 59................................
14. Maintenance 60...................................
15. Technical data 60.................................
16. Electrical diagram 61..............................
1. Safety rules and function
1.1 Special hints for the reader
A few special features were used in this manual to facilitate
reading and understanding of pictures and written instructions:
warns the operator of injuries and damage
and names the consequences, if the operator does
not follow the instructions.
Dsignals the operator where to act.
Safety rules are highlighted in grey.
Arrow showing where to look
Arrow showing the direction to move
1.2 Scope of application
The off-the-vehicle wheel balancer is designed for static and/or
dynamic balancing of car and light-truck wheels weighing up to
150 lbs and having an overall diameter of 44”. An optional wheel
guard is available especially for balancing wheels with a rim di-
ameter of more than 20”, but not mandatory for wheels of less
than 20” rim diameter as the balancer has a maximum speed of
98 rpm only. With optional wheel guard the maximum wheel di-
ameter is reduced to 37”.
In addition to conventional balancing operations, irregular run-
ning conditions of the wheel caused by geometric deformations
of the rims and unbalances of the tires, hence unsmooth ride,
can be identified, improved or, if possible, even eliminated. By
exact adjustment of the two wheel components relative to each
other optimum wheel running conditions or at least balance
weight minimisation can be achieved.