SD4030B-M0 8
------------------- 目 次 Table of Contents ---------------------
1. 注意事項(ご使用される前に必ずお読みください)
Precautions : Please review this manual thoroughly before using the product.
····································
1
1-1 設置について Installation
······················································································································
1
1-2 電源電圧について Supply Voltage
·······································································································
1
1-3 コネクタの接続について Connectors
···································································································
1
1-4 分割について Micro-step Resolution
·····································································································
1
1-5 モータの発熱について Motor Heating
··································································································
1
1-6 マイクロステップの電流値について Micro-step Current
····································································
1
1-7 ユニポーラタイプのモータ駆動について Operatiing Unipolar Motor
···················································
1
2. 主な仕様 Specifications
····························································································································
2
3. コネクタピンアサイン Connector pin assignment
·······················································································
3
3-1 CN1
··························································································································································
3
3- 2 CN2
··························································································································································
3
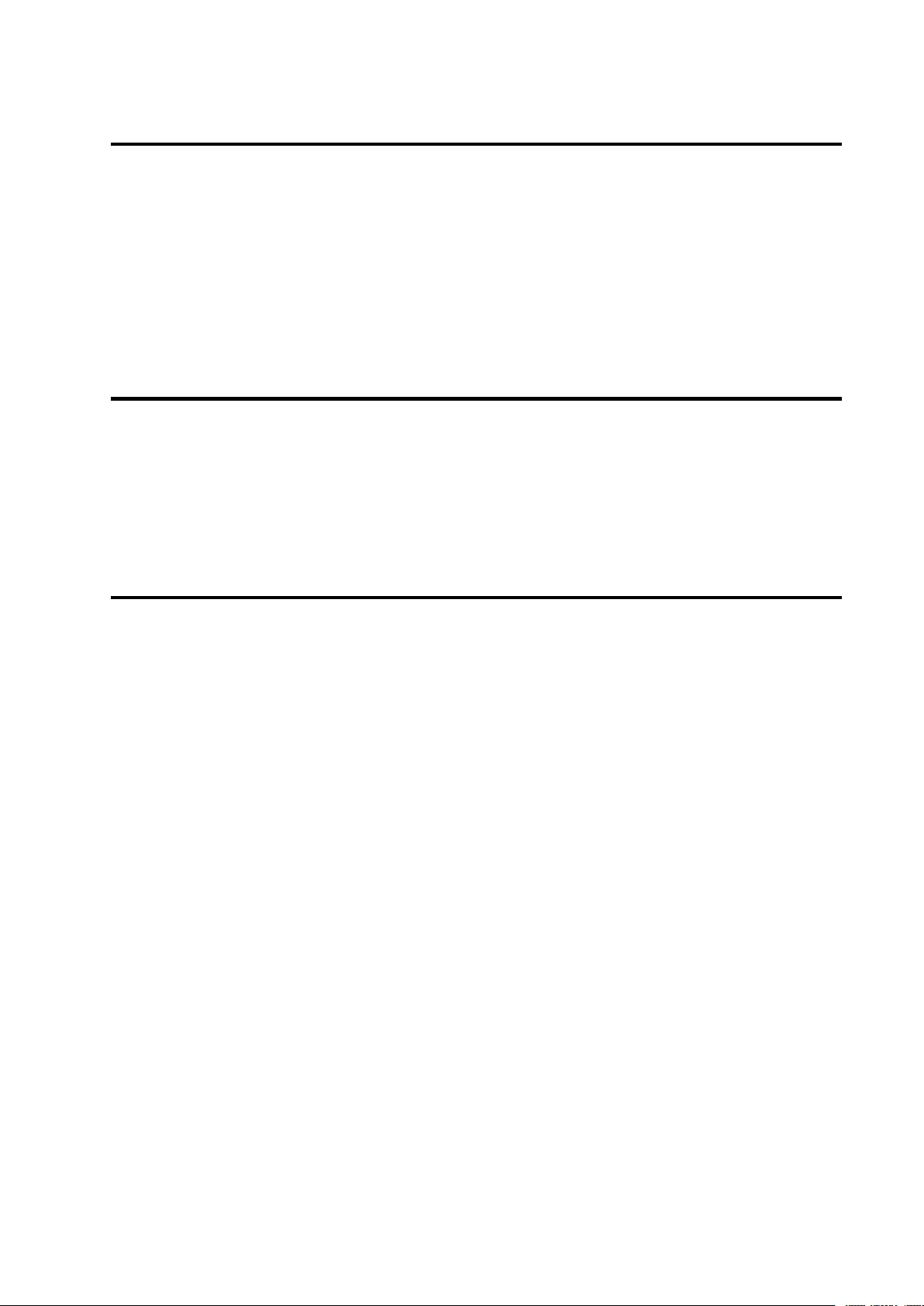
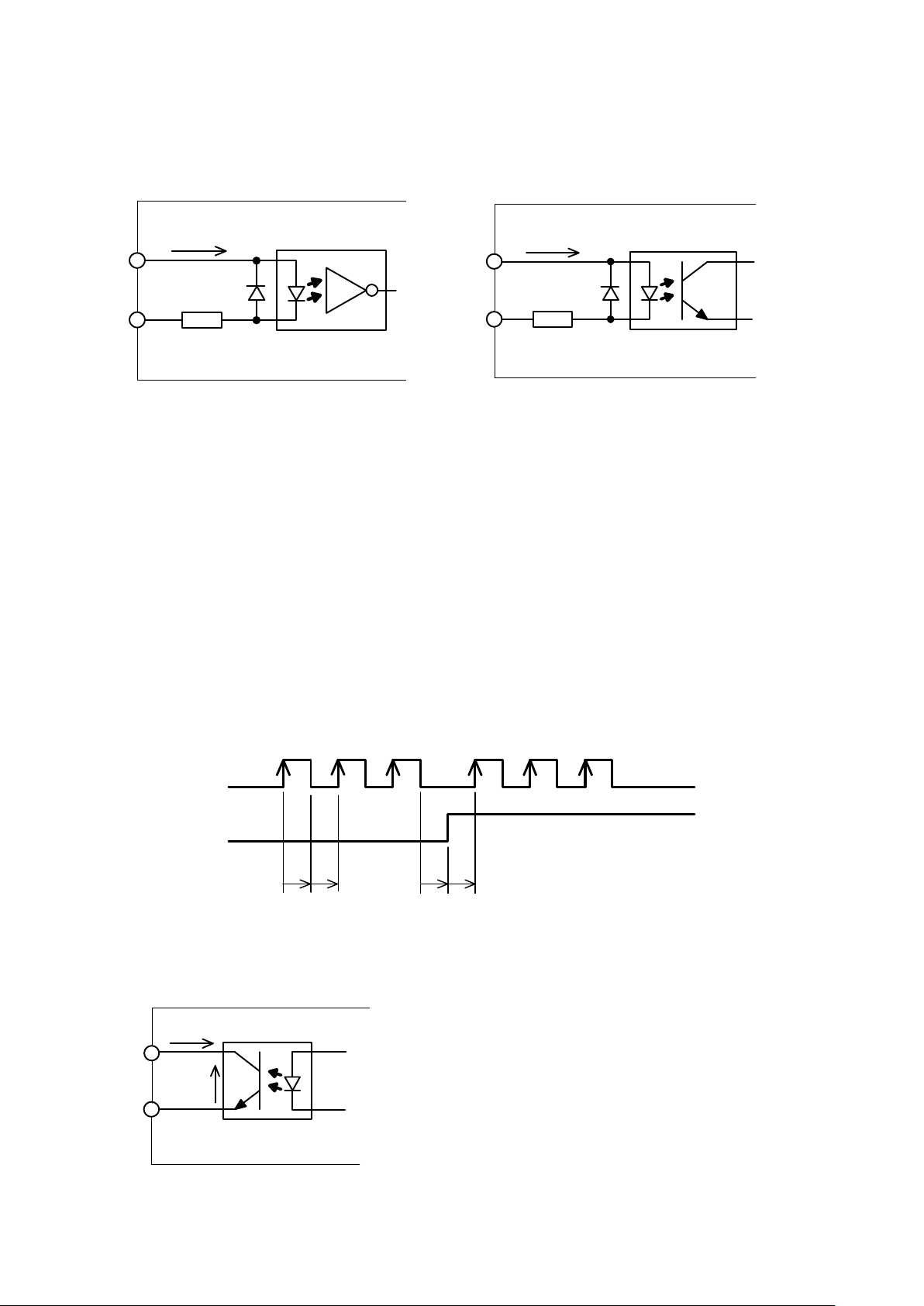
4. 入出力回路図 Input/Output schematic
····································································································
3
5. モータの接続方法 Connection Diagram to Motor
···················································································
5
5-1 バイポーラタイプのモータの場合 Bipolar Connetion
···········································································
5
5-2 ユニポーラタイプのモータの場合 Unipolar Connection
·······································································
5
6. スイッチ(SW1)の設定 Swtich Setting
·································································································
6
7. POW LED
··················································································································································
7
8. ミックスディケイについて Mix Decay Operation (Vibration Suppression)
················································
7
9. JOG動作 JOG Operation
··························································································································
7
10. ボリュームの設定 Volume Setting
·········································································································
7
10-1 RUNボリューム RUN Volume
·············································································································
7
10-2 STOP ボリューム STOP Volume
·········································································································
8
10-3 JOGボリューム JOG Bolume
···············································································································
8
11. RUNボリュームの正確な調整方法 Correct Adjustment for RUN Volume
·········································
9
12. 電源電圧による出力電流の減定格について Output current depend on Supply Voltage
·················
9
13. 部品配置図 Componets Layout
·········································································································
10
14. 外形寸法図 Dimension
·························································································································
10