Table of Contents
1. Notes (Please be sure to read before using)··············································································1
1-1 Installation·····················································································································1
1-2 Connection of Connector··································································································1
1-3 Division of Micro step·······································································································1
1-4 Heat generation of a motor ······························································································· 1
1-5 Electric current value of Micro Step ····················································································1
1-6 Unipolar type motor drive ·································································································1
1-7 Compatibility notice to the customers using SD4030B2.··························································1
2. Specifications ·····················································································································2
3. Connector pin assignment·····································································································3
3-1 CN1·····························································································································3
3-2 CN2·····························································································································3
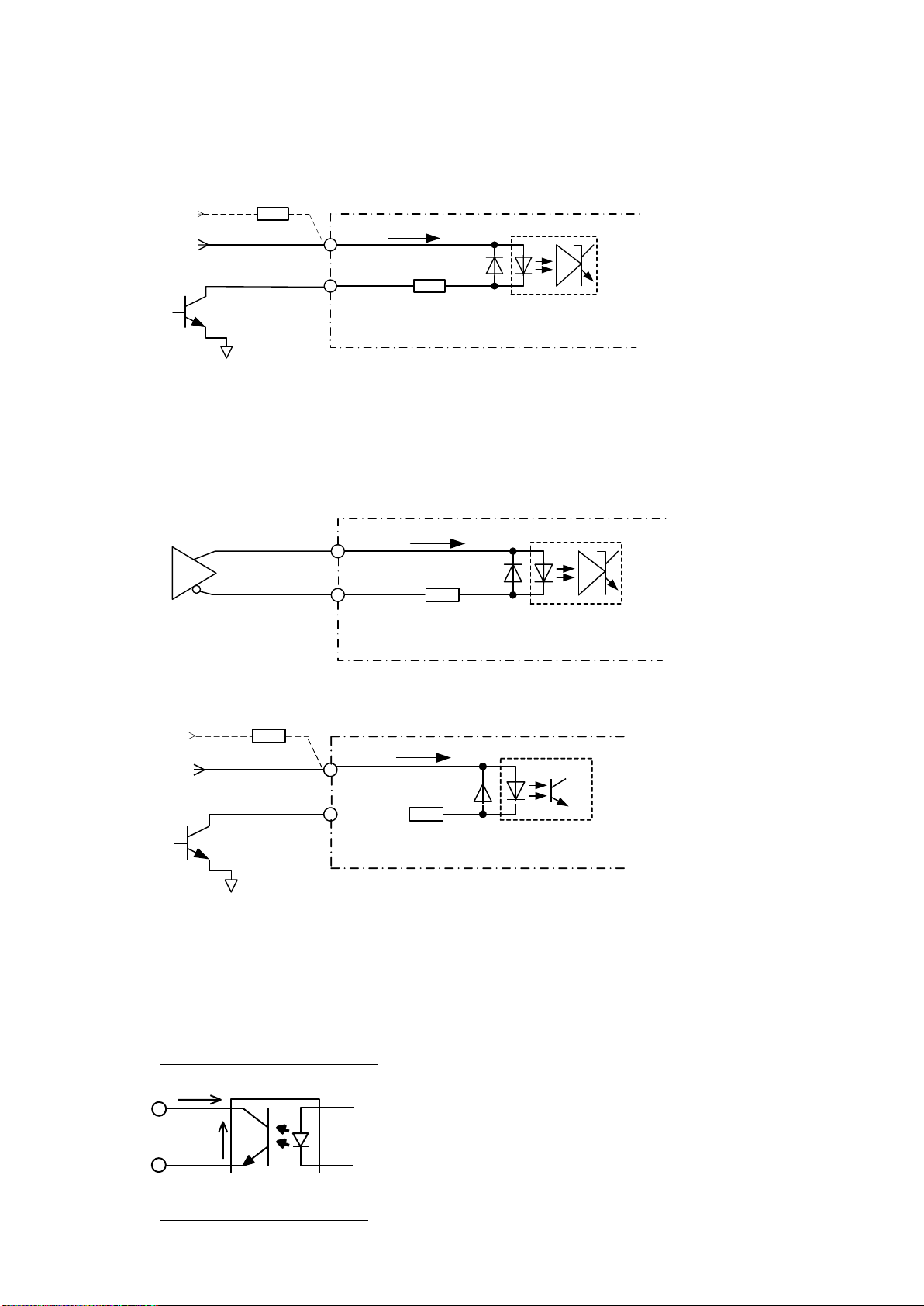
4. I/O circuit diagram················································································································4
4-1 Command pulse or CW pulse (P+, P-), Direction Command or CCW pulse (D+, D-) Input ·············4
4-2 Excitation off (OFF) input··································································································4
4-3 Alarm (ALM) Output·········································································································4
5. Logic of Command Input pulse·······························································································5
5-1 In case of 1-pulse mode···································································································5
5-2 In case of 2-pulses mode ·································································································5
6. Connection of Motor·············································································································6
6-1 In the case of Bipolar type motor························································································6
6-2 In the case of Unipolar type motor······················································································ 6
7. Setting of switch SW 1··········································································································7
8. Setting of switch SW 3(MIX) ··································································································8
9. Settings of Jumper JP1·········································································································9
10. LED“POW” ····················································································································· 10
11. JOG operation················································································································· 10
12. Setting of potentiometers··································································································· 10
12-1 RUN potentiometer······································································································ 10
12-2 STOP potentiometer·····································································································11
12-3 JOG potentiometer·······································································································11
13. How to adjust the RUN potentiometer precisely······································································ 12
14. Need of a rated output current reduction at a higher power supply voltage area···························· 12
15. Troubleshooting··············································································································· 13
16. Component layout············································································································ 14
17. Dimension······················································································································ 15
18. Difference between SD4030B2 and SD4030B3······································································ 16
18-1 Difference in how to set Mix Decay················································································· 16
18-2 Difference on the maximum frequency of Command pulse ·················································· 16
19. CE Marking····················································································································· 17
20. Caution for ESD damage··································································································· 17