III
Contents
Chapter 1 Safety Specification...............................................................................................................7
1.1 Introduction .....................................................................................................................................7
1.2 Safety Warning Signs Description ..................................................................................................7
1.3 Safety Precautions ..........................................................................................................................7
1.4 Responsibility and Risk ...................................................................................................................8
1.5 Emergency ......................................................................................................................................9
1.6 Precautions for Transportation and Handling .................................................................................9
Chapter 2 Quick Start............................................................................................................................10
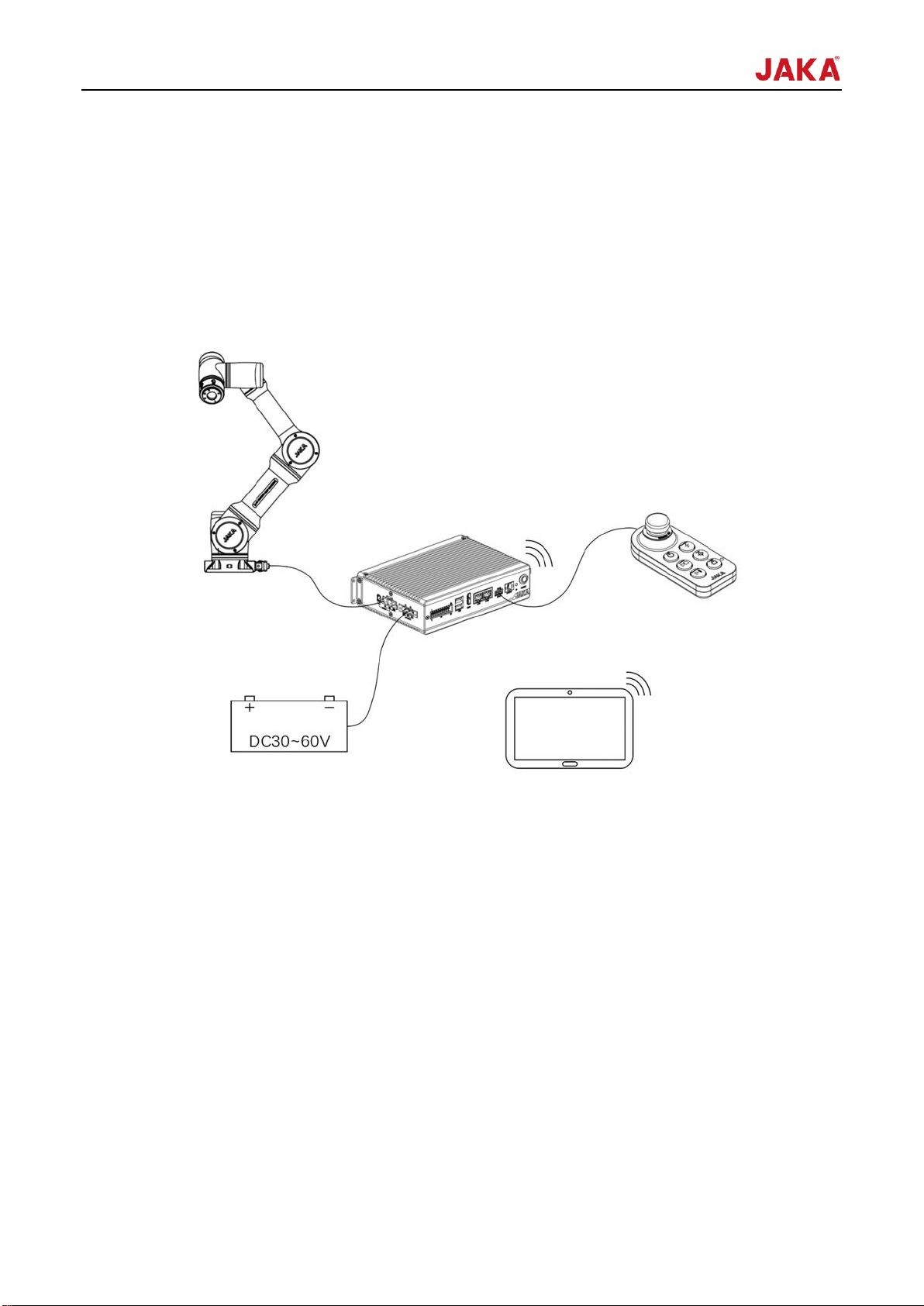
2.1 Typical Application Schematic Diagram........................................................................................10
2.2 Composite Robot Application........................................................................................................10
2.3 Operation Terminal........................................................................................................................11
2.4 Controller and Control Stick ..........................................................................................................11
Chapter 3 Mechanical Specification ....................................................................................................14
3.1 Outline Dimension.........................................................................................................................14
3.2 Specification..................................................................................................................................15
3.3 Installation .....................................................................................................................................15
3.2.1 Installation Method.................................................................................................................15
3.2.2 Installation Environment Requirements.................................................................................17
Chapter 4 Electrical Specification .......................................................................................................18
4.1 Introduction ...................................................................................................................................18
4.2 Absolute Limit Parameter..............................................................................................................18
4.3 Recommended Operating Conditions...........................................................................................18
4.4 Typical Power Consumption .........................................................................................................19
4.5 Computer Configuration................................................................................................................19
Chapter 5 Definition of Interface..........................................................................................................20
5.1 Front Panel Interface ....................................................................................................................20
5.1.1 Integrated Interface (I/O) .......................................................................................................20
5.1.2 Control stick Interface (STICK)..............................................................................................22
5.1.3 Emergency Stop Interface (E-STOP) ....................................................................................22
5.2 Side-panel Interface ......................................................................................................................23
5.2.1 Power Interface......................................................................................................................23
5.2.2 Robot Interface ......................................................................................................................24
Chapter 6 Detailed Introduction...........................................................................................................25
6.1 Overview .......................................................................................................................................25