Contents
Introduction............................................ 2
Installation.............................................. 2
Before You Start ................................. 2
Installation.......................................... 3
Connectors...................................... 3
Power.............................................. 3
CAL Switch –Grey Wire .................. 4
Data Connector............................... 4
Multiway Connector ....................... 4
In-vehicle Mounting........................ 5
Initial Toucan Configuration ............... 5
CAL switch configuration ................ 5
Doesn’t work?................................. 6
Datastream Configuration ...................... 7
Link (and Vi-PEC)................................. 7
Gauge Data Setup........................... 7
CAN DI Control Functions ............... 8
ECU Configuration –Anti-Theft ...... 8
Syvecs/Life Racing............................... 9
Toucan Receive (RX) Modes ........... 9
Toucan Transmit (TX) Modes........ 10
SCal Configuration for “Generic
Receive”, S7 using CAN2, or S8/12 10
5V Output Modes ......................... 11
Additional Features .......................... 12
Sensor Alarms............................... 12
Changing Frame/Slot Assignments
(except S7 CAN1 which is Fixed)... 12
Turning Parameters Off ................ 13
Extended Gauge Set...................... 13
Status Indicators........................... 13
Launch RPM .................................. 13
Emtron.............................................. 14
Configuring the Gauge Datastream
...................................................... 14
Haltech and ECUMaster.................... 15
Trim Switch ................................... 15
MoTeC M1 ........................................ 16
MoTeC Control Functions ............. 16
AlcaTek.............................................. 17
Simtek............................................... 17
CANbus Termination......................... 17
Menus and Operation........................... 18
Gauge Screens .................................. 18
Settings Menu................................... 19
Setup Menu ...................................... 19
Gauge Layout.................................... 20
CAL Selection Menu.......................... 20
Traction Control Selection Menu...... 20
Editing CAL Text ............................ 21
CAL Voltage Adjustment ................... 21
CAL PIN Protection............................ 22
Alarm Configuration ......................... 23
Available AlarmsError! Bookmark
not defined.
Shiftlight Configuration..................... 24
“More” Menus.................................. 25
Keypad.................................................. 26
Firmware Updates ................................ 26
Technical............................................... 27
CAN ID Ranges and Toucan Auto-detect
.............................................................. 28
Introduction
Thank you for purchasing a Toucan display. We hope it will be easy to install and configure,
and we suggest that you read this guide before installation.
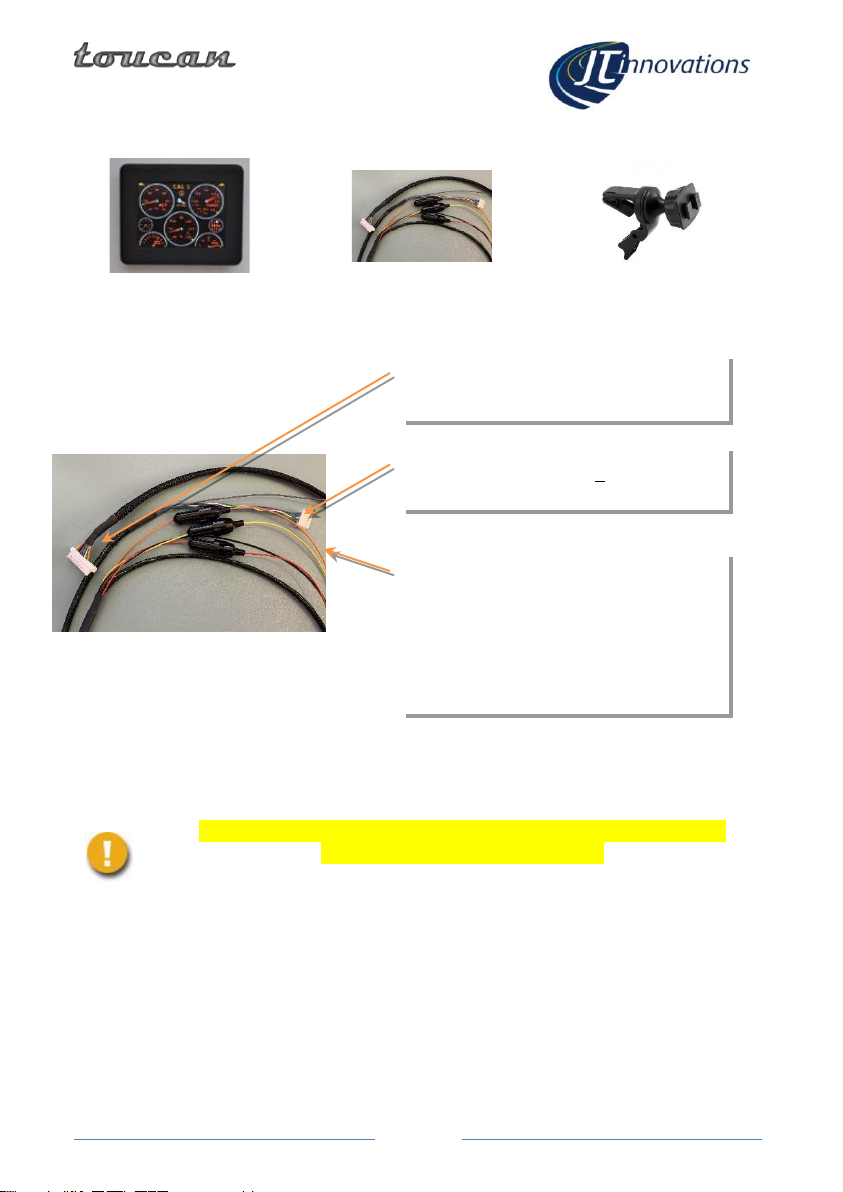
Installation
Before You Start
Please check the box contents to ensure nothing is missing. You should have: