ii. SAFETY WARNING! — PLEASE READ CAREFULLY
This product should be installed and serviced by a qualified technician, electrician
or electrical maintenance person familiar with its operation and the hazards involved.
Proper installation, which includes wiring, mounting in proper enclosure, fusing or other
overcurrent protection and grounding, can reduce the chance of electric shocks, fires or
explosion in this product or products used with this product, such as electric motors,
switches, coils, solenoids and/or relays. Eye protection must be worn and insulated
adjustment tools must be used when working with control under power. This product is
constructed of materials (plastics, metals, carbon, silicon, etc.) which may be a potential
hazard. Proper shielding, grounding and filtering of this product can reduce the emission
of radio frequency interference (RFI) which may adversely affect sensitive electronic
equipment. If information is required on this product, contact our factory. It is the
responsibility of the equipment manufacturer and individual installer to supply this safety
warning to the ultimate user of this product. (SW effective 11/92)
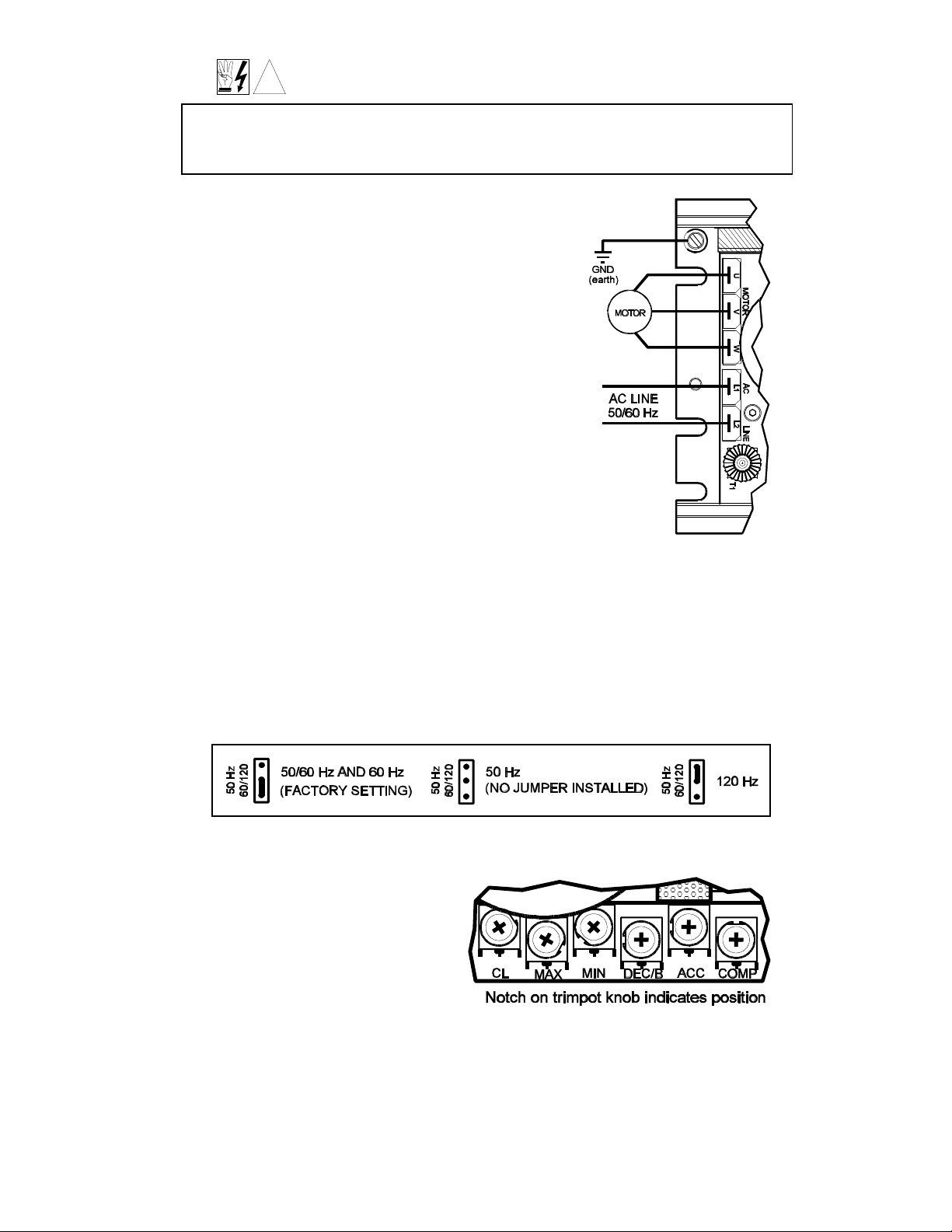
This control contains electronic Start/Stop and Enable circuits that can be used to
start and stop the control. However, these circuits are never to be used as safety
disconnects since they are not fail-safe. Use only the AC line for this purpose.
The input circuits of this control (potentiometer, start/stop, enable) are not isolated
from AC line. Be sure to follow all instructions carefully. Fire and/or electrocution
can result due to improper use of this product. After disconnecting AC power, high
voltage exists on this control until both LED’s are extinguished.
3
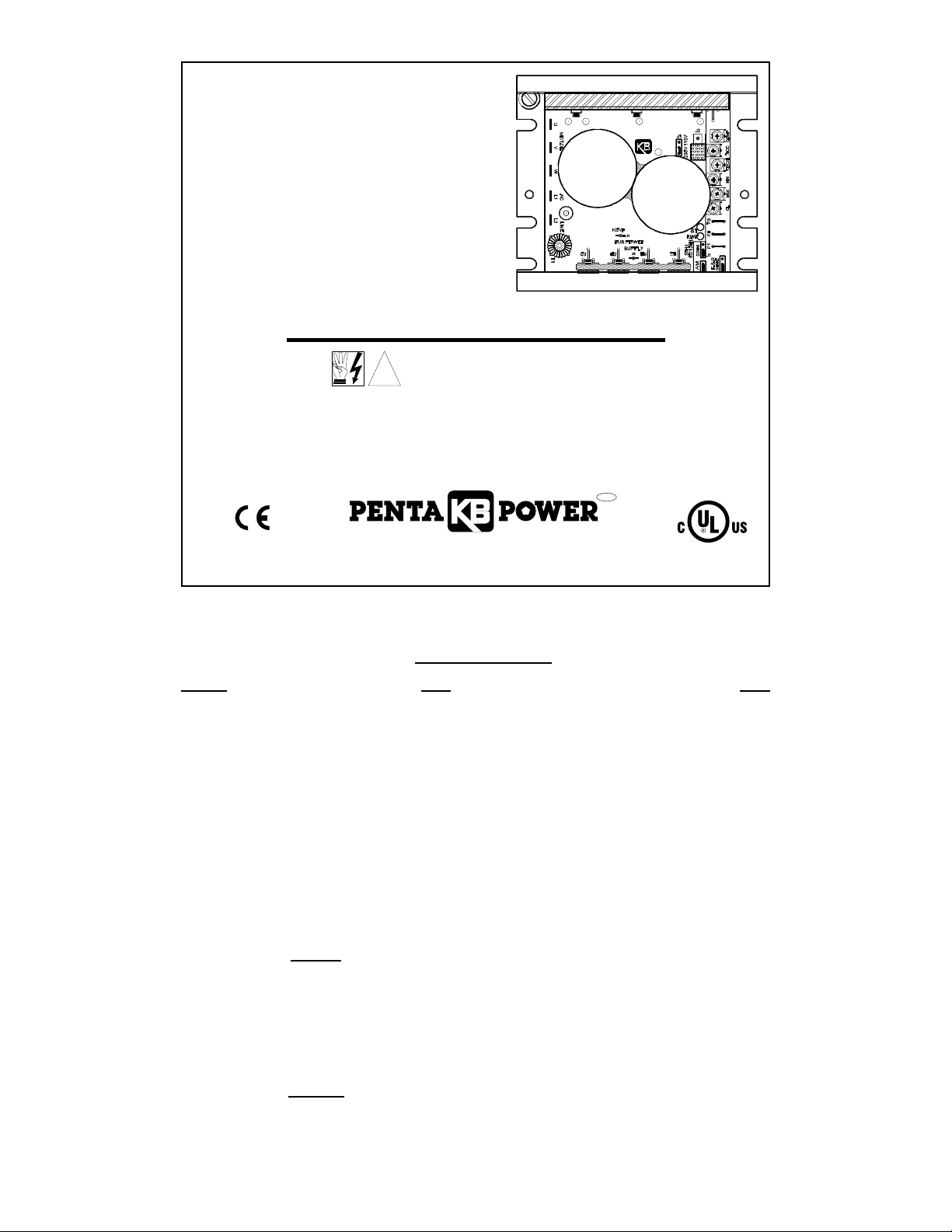
This product complies with all CE directives pertinent at the time of manufacture.
Contact factory for detailed installation instructions and Declaration of
Conformity. Installation of a CE approved RFI filter (KBRF-200A, KB P/N 9945A or
equivalent) is required. Additional shielded motor cable and/or AC line cables may be
required along with a signal isolator (SIVF, KB P/N 9474 or equivalent).
I. GENERAL INFORMATION.
The KBVF Adjustable Frequency Drive is designed to provide variable speed control of
standard three-phase AC induction motors. Adjustable linear acceleration and deceleration
are provided, making the drive suitable for soft start applications. The output voltage is
sinewave coded PWM operating at 16 kHz, which provides high motor torque, high
efficiency and low noise. The KBVF is a full featured drive, and due to its user friendly
design, it is easy to install and operate. Simple trimpot adjustments eliminate the computer-
like programming required on other drives. However, for most applications, no adjustments
are necessary.
The KBVF main features include Adjustable RMS Current Limit and I2tMotor Overload
Protection. Adjustable Slip Compensation provides excellent load regulation over a wide
speed range. Power Start™ delivers over 200% motor torque to insure startup of high
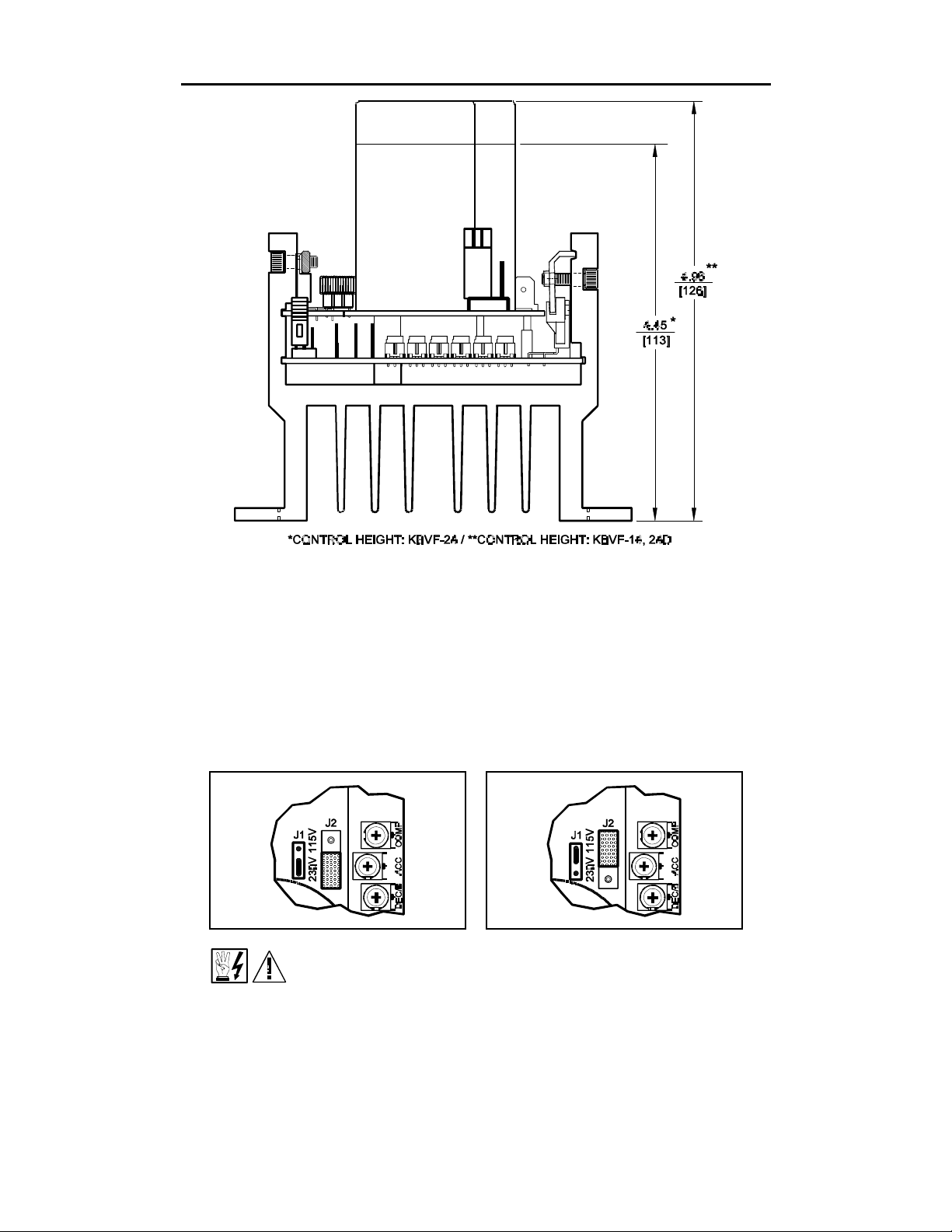
frictional loads. Several models, through 1 HP, are available to control a standard 208-
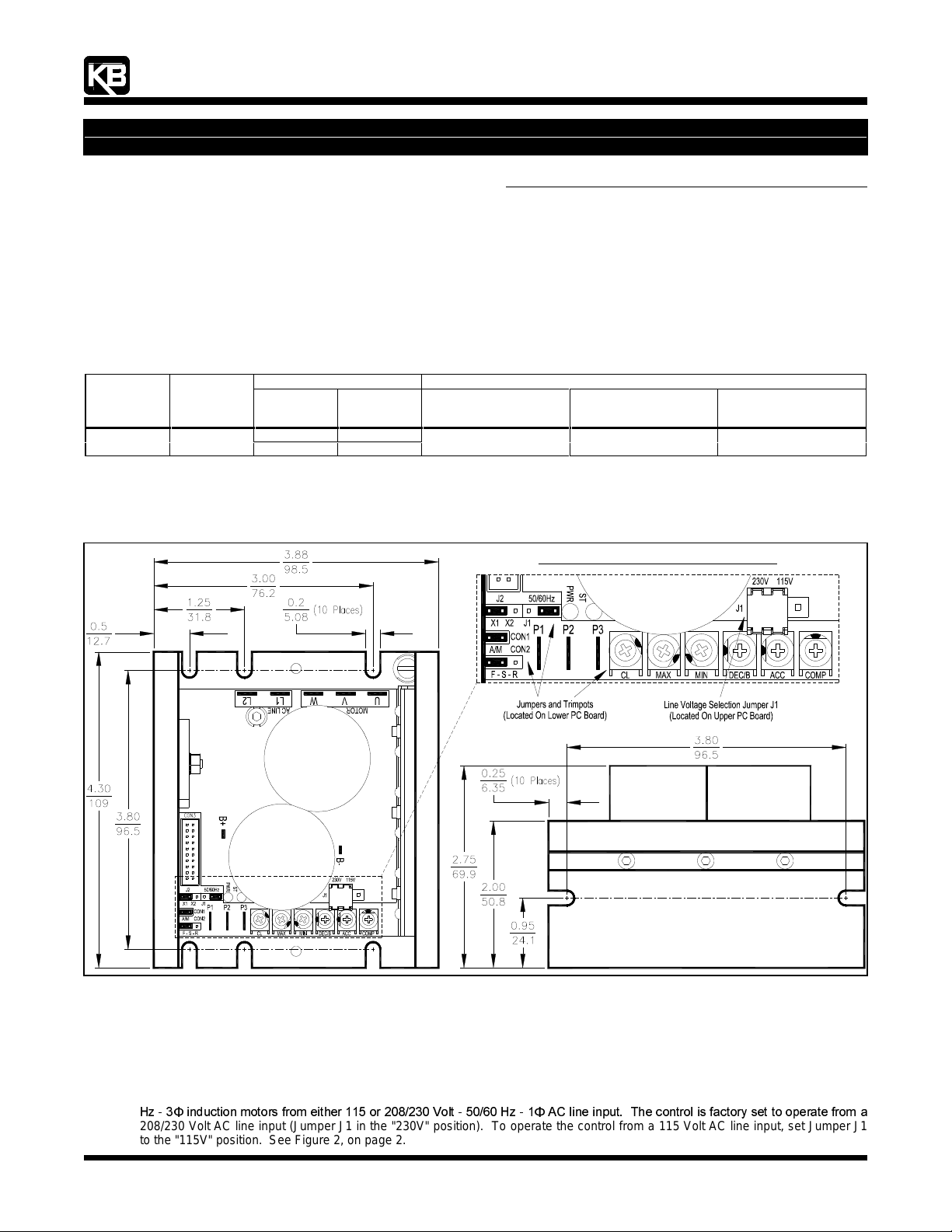
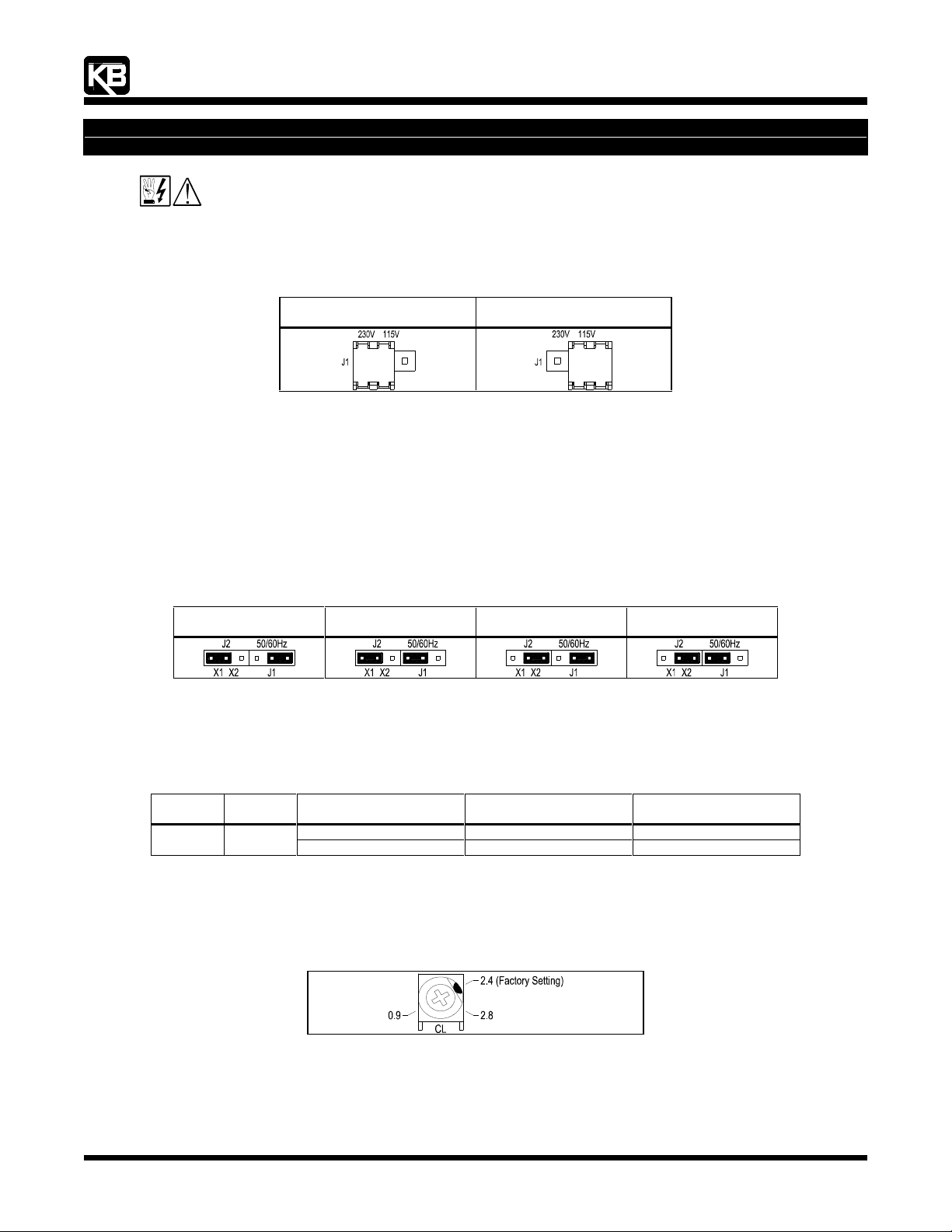
230VAC - 50, 60 and 50/60Hz motor from either a 115 or 230VAC-50/60Hz AC line. The
KBVF is easily tailored to specific requirements via selectable jumpers, such as Frequency
Range (0-60, 0-50, 0-120Hz), Manual/Auto Restart, and Forward-Stop-Reverse operation.
Other standard features include Electronic Inrush Current Limit (EICL™), which eliminates
harmful AC line inrush current, and a built-in dV/dT filter, which reduces harmful voltage
spikes to the motor. Also, two LED indicator lamps provide the user with diagnostic
information. The drive is housed in a versatile U-frame chassis, which facilitates mounting
and wiring.
4