iii
TABLE OF CONTENTS
I. GENERALINFORMATION ........................................ 1
1.1 Specifications ............................................. 2
1.2 Options .................................................. 2
II. INSTALLATION ................................................. 3
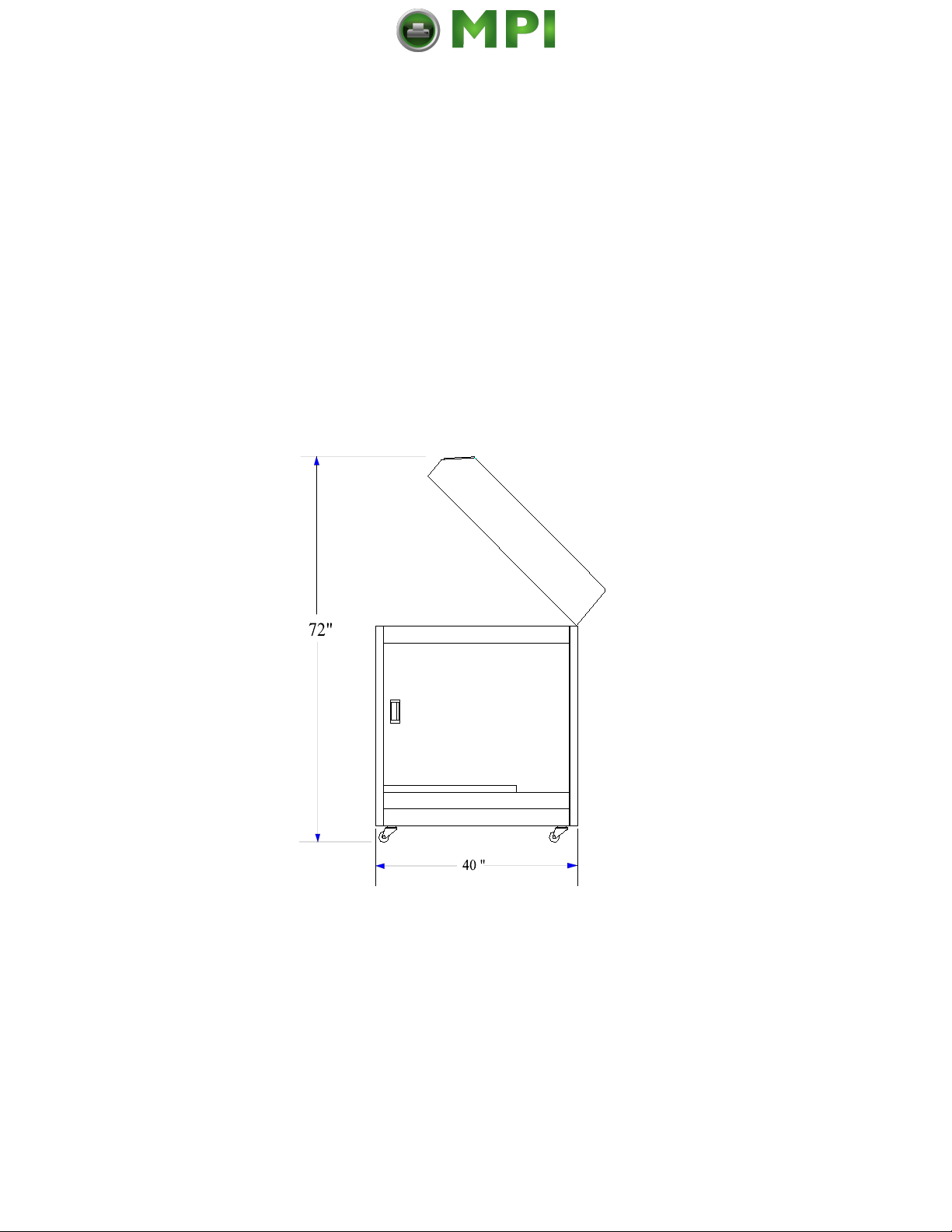
2.1 SpaceRequirements........................................ 3
2.2 Unpacking ................................................ 5
2.3 Configuration.............................................. 8
2.4 InterfaceCableRequirements ................................ 8
III. THEORYOFOPERATION ....................................... 10
3.1 SystemBlockDiagram ..................................... 10
3.2 Electronics............................................... 10
3.2.1 AC/DCPowerDistribution ................................... 10
3.2.2 DCDistributionBoard ...................................... 10
3.2.3 BusBoard ............................................... 11
3.2.4 MicroprocessorBoard ...................................... 11
3.2.4.1 MicroprocessorDesign .................................. 11
3.2.4.2 InterfaceData ......................................... 11
3.2.4.3 PaperfeedSystem ...................................... 11
3.2.4.4 Interlocks ............................................. 11
3.2.4.5 DrapeSensor.......................................... 12
3.2.4.6 RibbonDrive .......................................... 12
3.2.4.7 AnalogDesign ......................................... 12
3.2.4.8 HammerProtectionCircuit................................ 13
3.2.5 HammerDriverBoard ...................................... 13
3.2.5.1 HammerCircuitDesign .................................. 13
3.2.5.2 HammerTestRoutine ................................... 13
3.2.5.3 HammerFlightTimeRoutine .............................. 13
3.2.6 Operator'sPanel .......................................... 14
3.2.7 PaperPullerBoard ........................................ 14
3.3 Mechanics ............................................... 14
3.3.1 PaperfeedSystem......................................... 14
3.3.2 RibbonSystem ........................................... 14
3.3.3 PaperPuller ............................................. 14
3.4 CharacterandControlCodes ................................ 15
3.4.1 CharacterSetCodes....................................... 15
3.4.2 FormatControlCodes...................................... 15
IV. REPLACEMENTPROCEDURES .................................. 17
4.0 TOOLSREQUIRED ....................................... 17
4.1 HammerModule .......................................... 18
4.2 Hammerbackstopscrew.................................... 19
4.3 Drummotor .............................................. 20
4.4 PaperFeedmotor ......................................... 21
4.5 Ribbonincrementmotor .................................... 22
4.6 Ribbontakeupmotor....................................... 23
4.7 Paperpullermotor......................................... 24
4.8 DrumBelt ............................................... 25
4.9 Paperfeedbelts .......................................... 26
4.10 Ribbonincrementbelt ...................................... 27
Mantenimiento Periféricos Informáticos SL C/Canteras, 15 28860 Paracuellos de Jarama Tel: 00 34 917481604 WEB: https://mpi.com.es