.P.A.
24020 GORLE (BERGAMO) ITALI
FAX (International): +39 035 4282400
E-m
ation in the menu ..............................................................................................................................................................................................................................................................................................
.....................................................................................................................................................................................................................................................................................
of the motor ..........................................................................................................................................................................................................................................................................
3.1 2-wires control from the flexible I/O terminal block ...........................................................................................................................................................................................................................................
3.2 From keypad .......................................................................................................................................................................................................................................................................................................
................................................................................................................................................................................................................................................................................................
4.1 From keypad .......................................................................................................................................................................................................................................................................................................
4.2 From external potentiometer .............................................................................................................................................................................................................................................................................. 5
4.3 From analog input signal type 0-10V ................................................................................................................................................................................................................................................................. 5
4.4 From analog input signal t
pe 4-20mA ..............................................................................................................................................................................................................................................................
4.5 With preset frequency setpoints .........................................................................................................................................................................................................................................................................
4.6 From motor potentiometer
...................................................................................................................................................................................................................................................................... 7
4.7 PID
etpoint adjusted with keypad and feedback signal type 0-10V ...................................................................................................................................................................................................7
4.8 PID Control - Setpoint adjusted with keypad and feedback signal type 4-20mA ...............................................................................................................................................................................................
.......................................................................................................................................................................................................................................................................................................
...................................................................................................................................................................................................................................................................................................
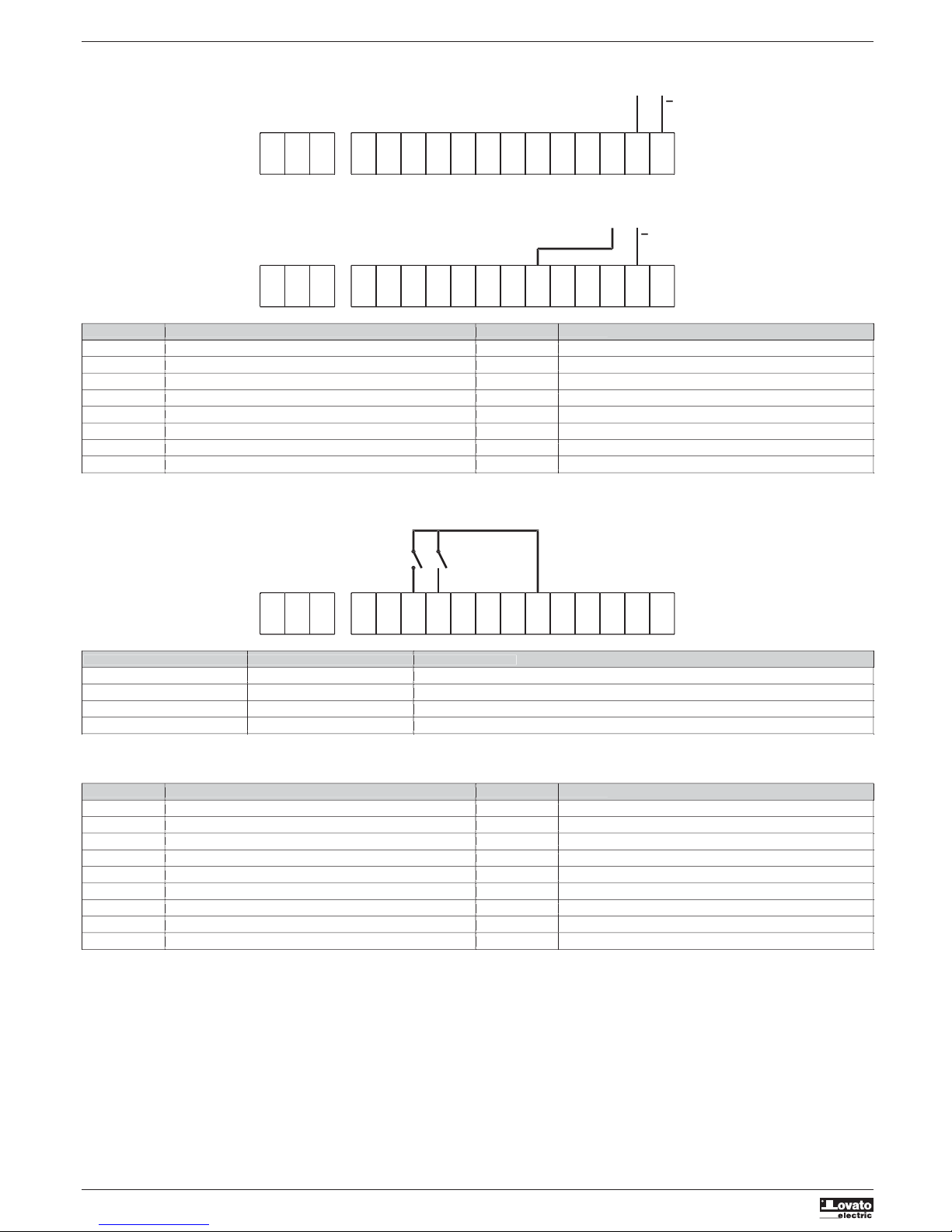
6.1 Configuration of the rela
output function .......................................................................................................................................................................................................................................................... 9
6.2 Configuration of the DO1 digital output function ................................................................................................................................................................................................................................................ 9
6.3 Configuration of the AO1 analog output function ............................................................................................................................................................................................................................................... 10
6.4 Enable of the start at power-up function (auto-restart) ...................................................................................................................................................................................................................................... 10
6.5 Command of digital inputs from PLC ................................................................................................................................................................................................................................................................. 1
onfiguration of the automatic (PID) / manual (frequency regulation) mode .................................................................................................................................................................................................... 1
ommon error codes ......................................................................................................................................................................................................................................................................................... 1
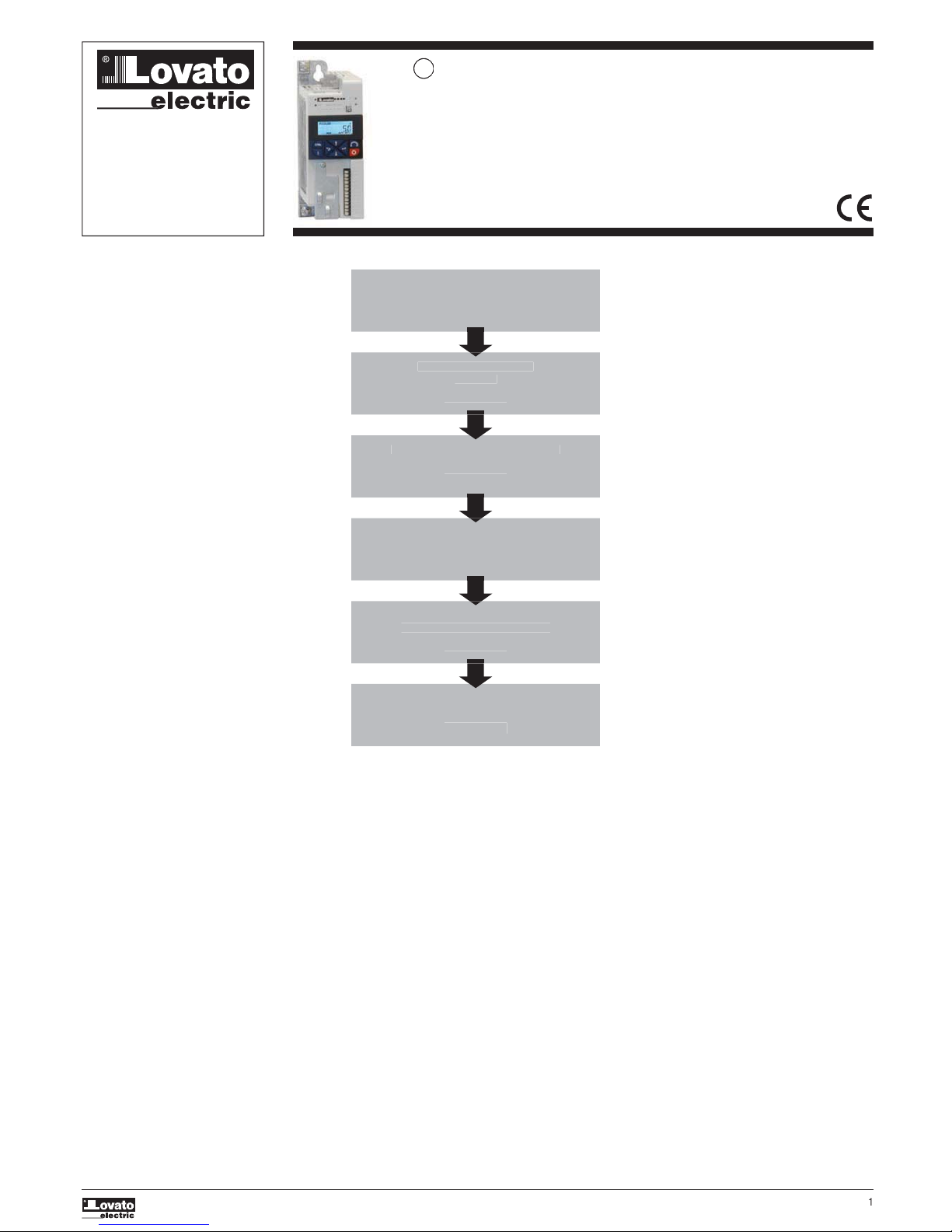
HE RUN AND STOP OF THE MOTOR?
ter 5
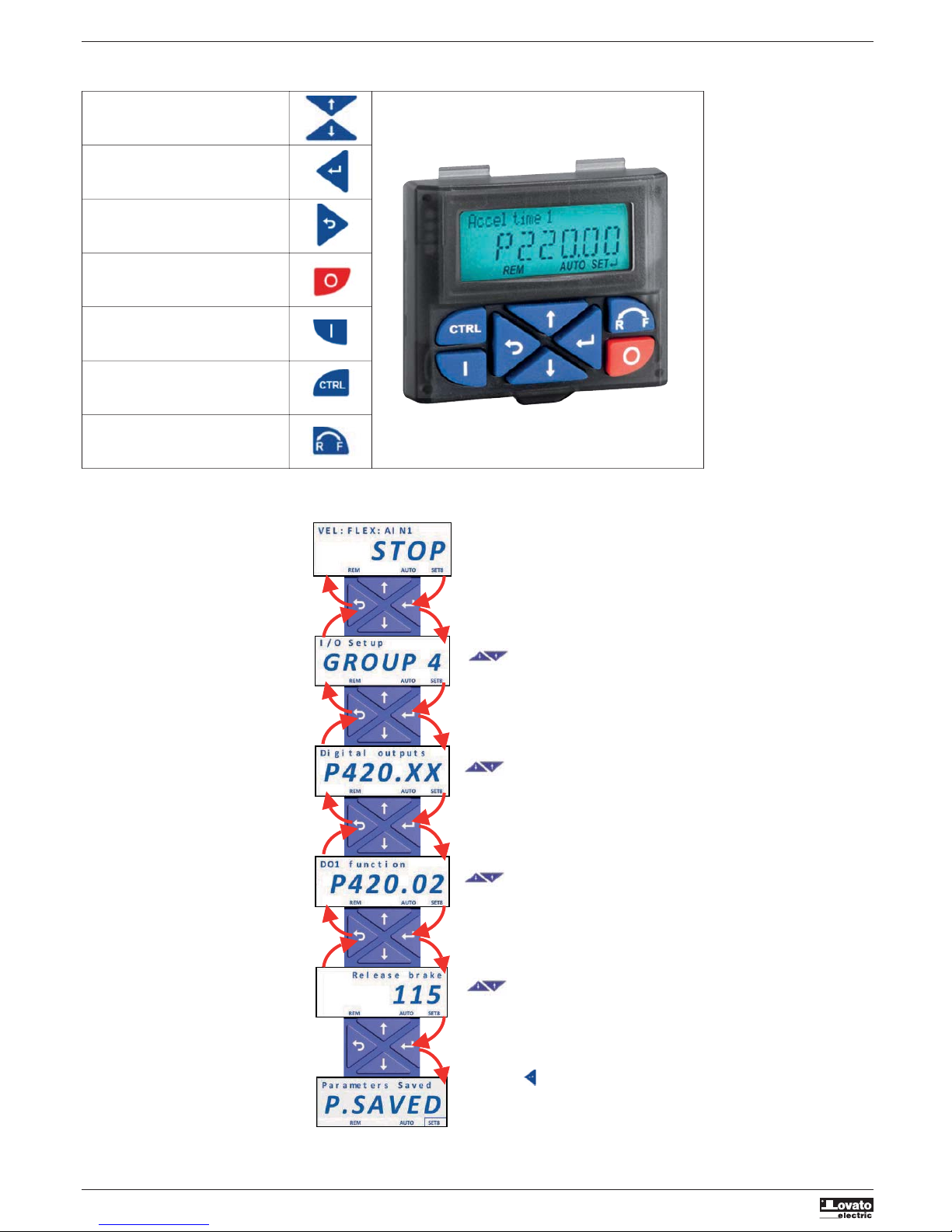
LEARN HOW TO NAVIGATE THE MEN
ee chapter 1
RESET PARAMETERS TO
ter 6
Steps to follow for the confi
uration of the variable speed drive: