TABLE OF CONTENTS
TABLE OF CONTENTS.................................................................................................................................................1
LASER SAFETY ..........................................................................................................................................................3
INTRODUCTION..........................................................................................................................................................4
Overview..............................................................................................................................................................4
System Configuration..........................................................................................................................................4
LP-4210F™ Data Acquisition Instrument ...........................................................................................................5
Delivery System....................................................................................................................................................7
LaserViewer™ 2010 Software .............................................................................................................................7
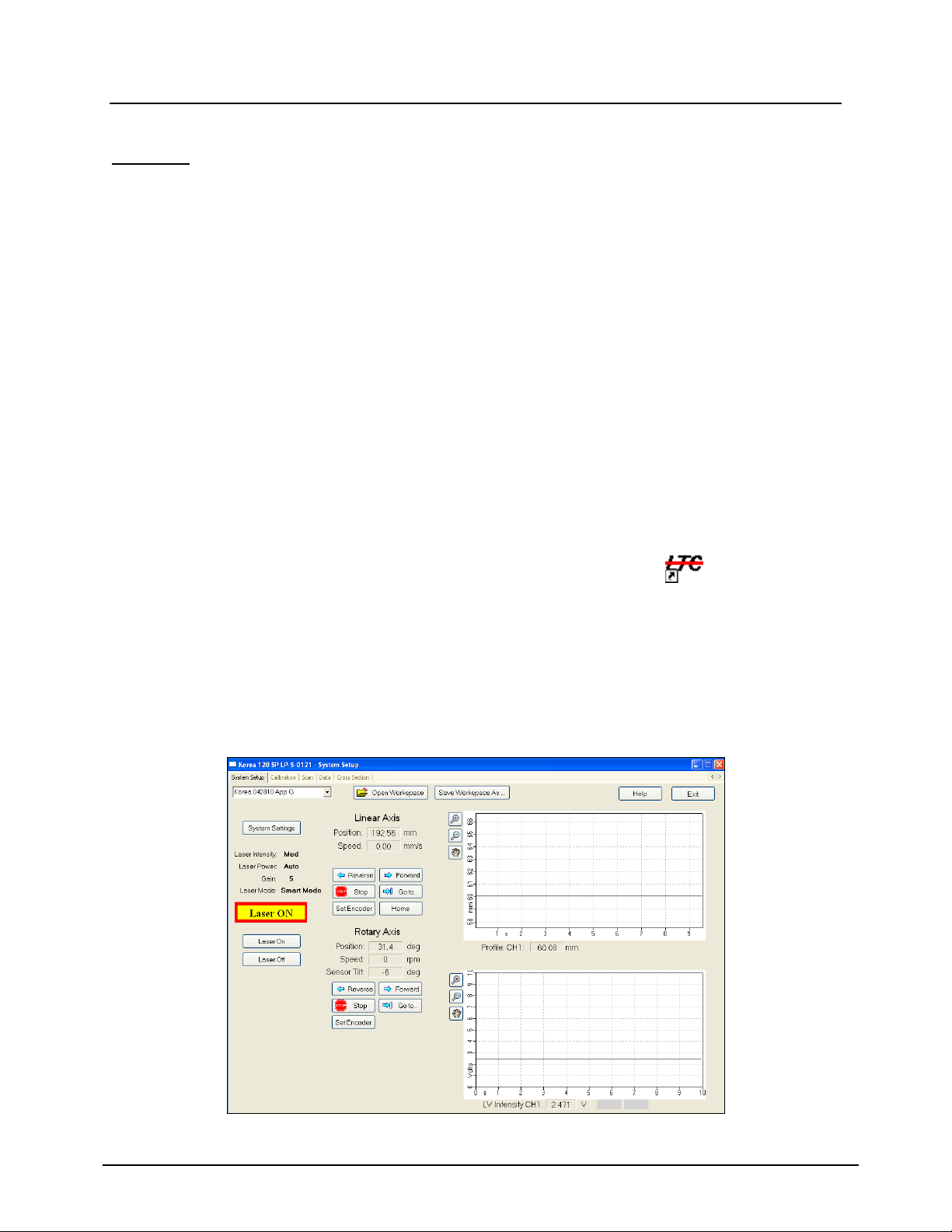
SYSTEM SETUP ..........................................................................................................................................................8
SYSTEM SETTINGS.....................................................................................................................................................9
Laser Power.........................................................................................................................................................9
Automatic.............................................................................................................................................................9
Fixed ....................................................................................................................................................................9
Laser Intensity.....................................................................................................................................................9
Gain .....................................................................................................................................................................9
Null......................................................................................................................................................................9
OPENING AND SAVING WORKSPACES......................................................................................................................10
Opening a Different Workspace .......................................................................................................................10
Saving a Workspace..........................................................................................................................................10
MOTOR AND AXIS CONTROL ...................................................................................................................................11
Driving Motors..................................................................................................................................................11
Moving to a Specified Location ........................................................................................................................11
Stopping Motors ................................................................................................................................................11
Setting Encoder Values.....................................................................................................................................11
SYSTEM CALIBRATION ............................................................................................................................................12
Initializing a Calibration Scan .........................................................................................................................12
If the Calibration Verification Process Passes.................................................................................................12
If the Calibration Process Fails........................................................................................................................13
Calibration Troubleshooting.............................................................................................................................14
SCANNING OPERATION............................................................................................................................................15
Setting the Scan Parameters.............................................................................................................................15
Advanced Scan Parameters................................................................................................................................15
Initializing a Scan .............................................................................................................................................16
VIEWING AND ANALYZING DATA............................................................................................................................17
Viewing Profile Data.........................................................................................................................................17
Opening Data Files............................................................................................................................................17
Data File Header ...............................................................................................................................................17
Color Plot Display .............................................................................................................................................18
Color Palette......................................................................................................................................................19
Changing the Magnification ..............................................................................................................................19
Viewing in 1:1 Aspect Ratio...............................................................................................................................20
Displaying Cross-Sectional Auxiliary Windows ................................................................................................20
Displaying Annotations......................................................................................................................................20
Viewing LaserVideo™ (LVI) Data ...................................................................................................................21
Data Analysis.....................................................................................................................................................22
Applying Processors to a Scan Data File ..........................................................................................................22
Processors..........................................................................................................................................................23
Reading Data Values .........................................................................................................................................25
Making point-to-point measurements.................................................................................................................25
Calculating Area/Diameter Statistics.................................................................................................................25
Viewing Cross Sectional Data...........................................................................................................................26
Selecting the Viewing Position...........................................................................................................................26
Selecting the Reference Radius ..........................................................................................................................27
Measuring the Radius/Diameter ........................................................................................................................27
Measuring Pit Depth..........................................................................................................................................27
Printing and Saving Data .................................................................................................................................28