
-6-
Obstacle avoidance function (need to be purchased separately)
Use and effect of obstacle avoidance function
5M
10M
15M
20M
5M
10M
15M
20M
When the drone flies on the left side, as
shown in Figure 7, 20 meters from the
left side of the drone is the effective
scanning range of the obstacle avoider,
and the scanning path is about 90°
between the two arms on the left side.
The same applies to the scanning range
of the shock absorber flying backwards
or right.
When the drone is flying, as shown in
Figure 6, 20 meters in front of the drone
is the effective scanning range of the
obstacle avoider, and the scanning
path is about 90° between the two
arms in the flying direction.
The position where the UAV stops
flying is determined by the flight
speed, when the UAV is flying at full
speed in low gear. After the drone
scans the obstacle at 20 meters, it
starts to calculate and issue a stop
flight instruction. The stop position
of the drone is determined by the
flight speed (the faster the flight
speed, the closer the distance
between the drone and the obstacle,
and the opposite flight The slower
the speed, the farther the distance
between the drone and the obstacle)
When the UAV encounters obstacles
and hover in the scanning range of 20
meters in the flying direction, the UAV
cannot continue to fly in that direction,
and can continue to fly after avoiding
the obstacles or to other obstacles
within 20 meters. In the direction of
flight.
When the UAV takes off, there is an obstacle within 20 meters of the forward direction. The UAV cannot fly in this direction. It can continue
to fly after avoiding the obstacle or fly in the direction of other obstacles within 20 meters.
6. If the UAV encounters an obstacle during GPS intelligent return, the obstacle avoidance device will rise to a safe height again after
scanning the obstacle before returning.
Precautions for the installation and use of obstacle avoidance equipment:
Obstacle avoidance function and working principle
Use note:Obstacle avoidance equipment must be installed before turning on the power of the drone, otherwise it will damage the obstacle
avoidance equipment and affect normal use.
1. Take out the cover for the
installation position of the
obstacle avoidance equipment
2. Insert the obstacle avoidance
equipment as shown in the
picture
The obstacle avoidance equipment will rotate left and right when it is
running. Do not manually interfere with it to prevent it from rotating
when it is rotating, otherwise the equipment may be damaged.
FIG. 6
FIG. 8 FIG. 9
FIG. 7
FIG. 5
Special suggestion:
it is suggested that when the LED light in front of the body flashes slowly during Drone flight, the remote control makes
a "Di" sound,it indicates that the Drone has insufficient power. When the Drone power is insufficient or loses the signal
during flight, the aircraft will automatically enter the return mode and fly back according to the original route.
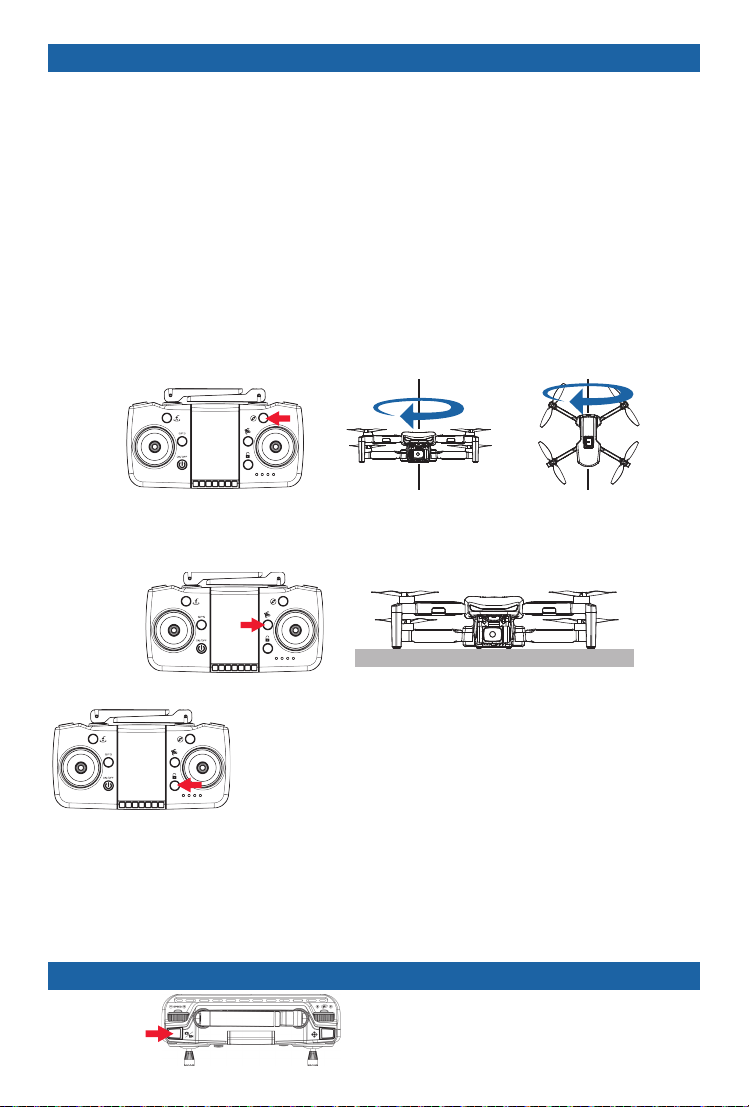
5.One-press for return
When the drone is flying in the air, press
this function button on the remote control
(Figure 5), it will automatically rise or fall
to a height of 50 meters, return straight
and land to the take-off location.
One-press for return
Starting point
End point
When turning on this product, do not touch the obstacle avoidance equipment, because the obstacle avoidance equipment is in the power-on
working state, unauthorized touching will cause the obstacle avoidance equipment to not work normally, and it will most likely damage the
obstacle avoidance equipment function.
When removing the obstacle avoidance equipment, the power of the drone must be turned off before dismantling, otherwise it will damage
the obstacle avoidance equipment and affect normal use.
The product is turned on by default in low-speed mode (50%). The drone has 360° obstacle avoidance function, such as switching to high-
speed mode (100%). Because the aircraft is flying fast, the system has not received the instruction to stop the flight. The aircraft may have
hit an obstacle, and the UAV's obstacle avoidance function automatically fails.
20M
20M
No obstacle
avoidance
No obstacle
avoidance
No obstacle
avoidance
No obstacle
avoidance
No obstacle
avoidance
No obstacle
avoidance
obstacle obstacle
Can go back
Unable to move forward
Can fly left Can fly right
(Please fly in outdoor GPS mode, the indoor space is too small to affect the flight status.)













 user manual")









