Technical manual
SMCI33 V2.0
Overview
Issue: V 2.0 - 2009-07-01 5
SMCI33 functions
The stepper driver SMCI33 contains the following functions:
•Microstep 1/1 – 1/64 Final output stage (0.014° step resolution)
•Closed-Loop current control (sinusoidal commutation via the encoder)
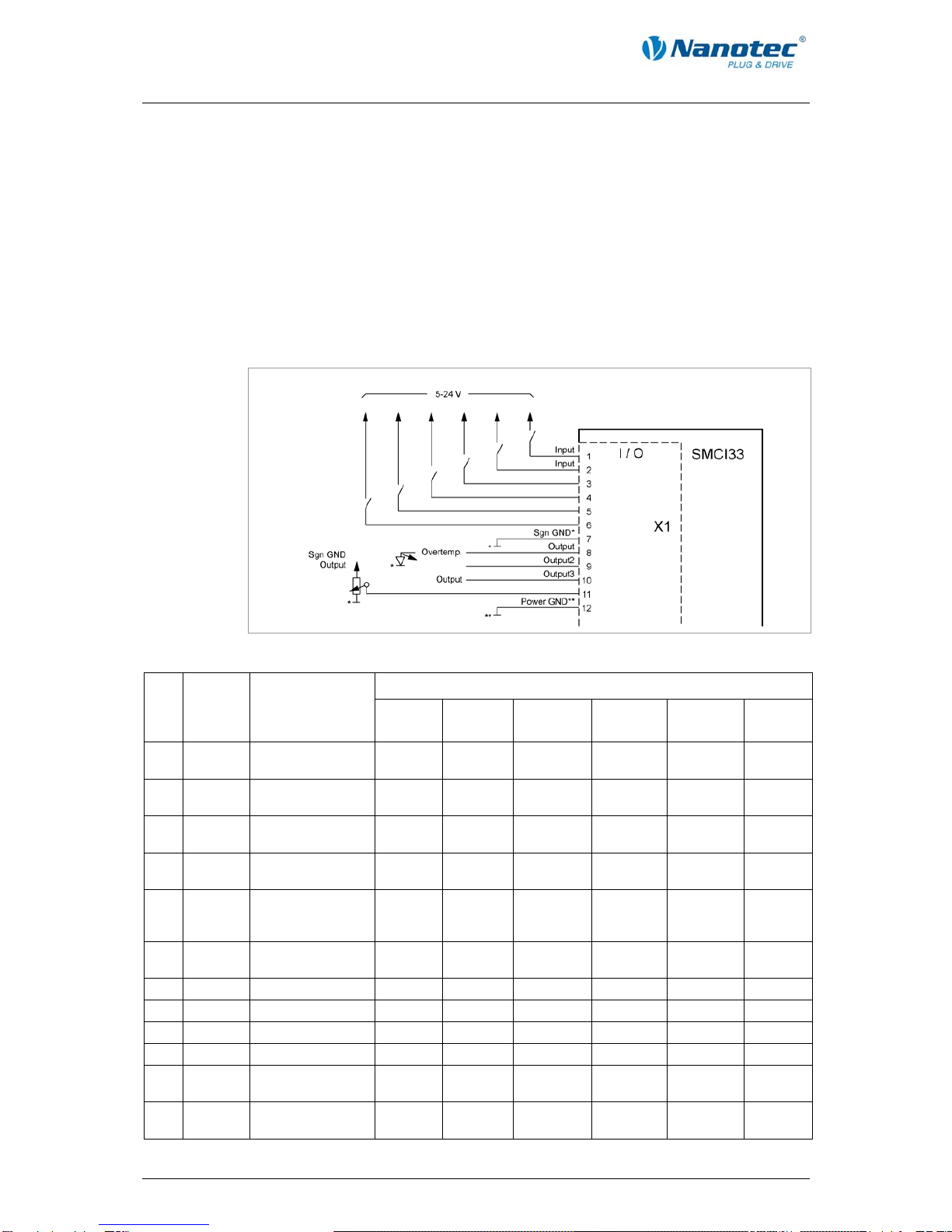
•Powerful DSP microprocessor for flexible I/O
•Rotation monitoring for optional encoder
•RS485 or USB interface for parameterisation and control
•Network capability of up to 32 motors
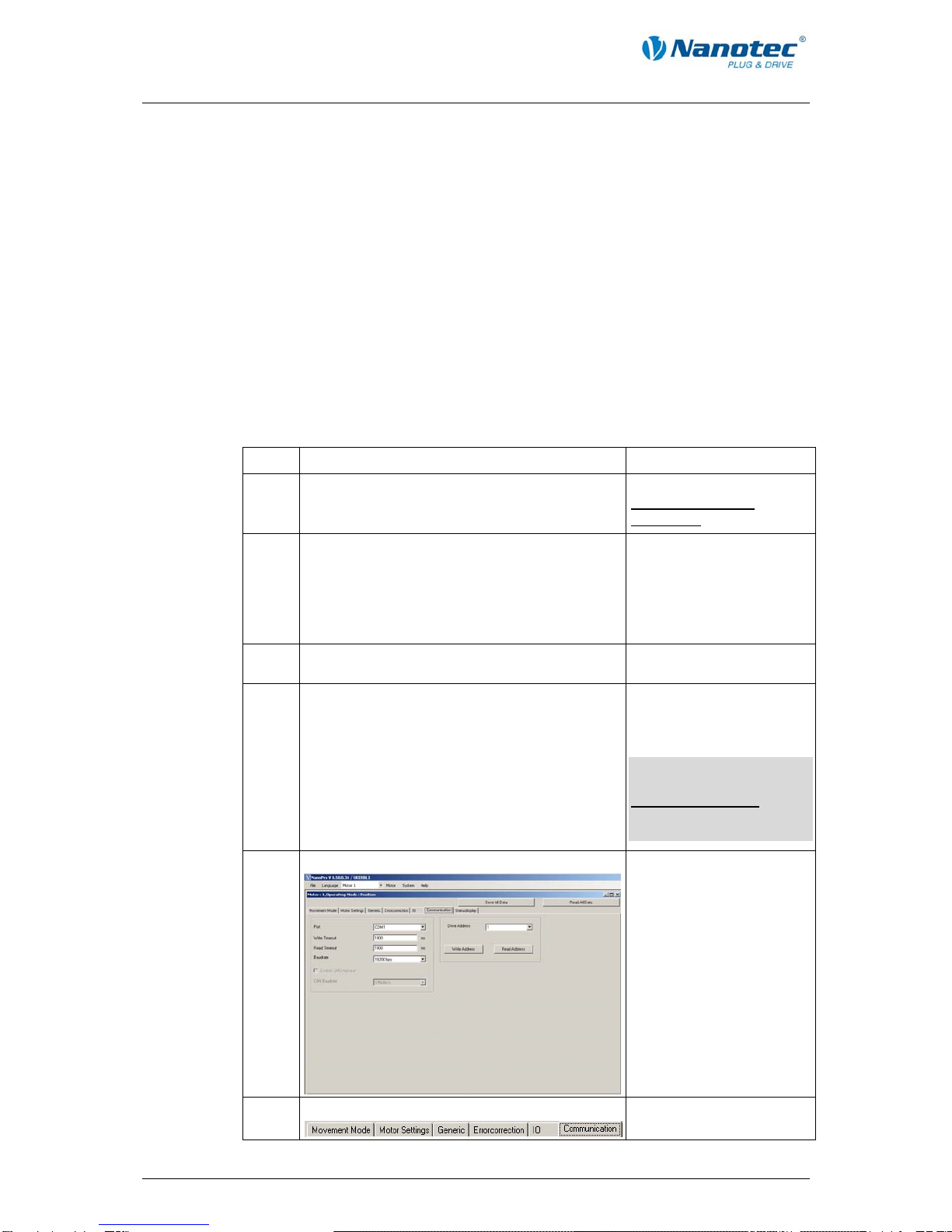
•Easy programming with the Windows software NANOPRO
Operating modes
The following operating modes can be selected:
•Positioning
•Speed
•Flag positioning
•Clock direction
•Analogue or joystick operation (±10 V)
•Analogue positioning mode
•Torque mode
Function overview
The operating behaviour of the motor can be set and optimised according to individual
requirements by setting the motor-related parameters such as phase current
(selectable in 1% increments), step resolution (from 1.8° - 0.014°), as well as the
adaptive microstep (automatic adaption of step width). Machine-related parameters
can be set using the NANOPRO software and significantly reduce commissioning
time:
•Distance in steps, degrees or mm
•Speed in Hertz, rpm or mm/s
•Feed constant in mm/revolution
•Gear reduction with reverse clearance
Three adjustable reference modes (external and internal) enable automatic machine
settings, whereby external reference switches may be inapplicable if there is a shift <
360° possibly due to the index signal of the internal encoder.
Even if stepper motors do not lose steps during normal operation, the integrated
speed control provides additional security in all operating modes, e.g. against motor
stalling or other external sources of error. The monitoring function detects a stalled
motor or step loss after half a step at the most (for 1.8° stepper motors).
Automatic error correction is possible after the drive profile is ended or during the
drive.