Contents
1 Introduction.....................................................................................................3
1.1 Version information.....................................................................................................................................3
1.2 Copyright, marking and contact..................................................................................................................3
1.3 Intended use...............................................................................................................................................3
1.4 Warranty and disclaimer.............................................................................................................................3
1.5 Target group and qualification....................................................................................................................4
1.6 EU directives for product safety.................................................................................................................4
1.7 Numerical values........................................................................................................................................ 4
2 Technical details and pin assignment.........................................................5
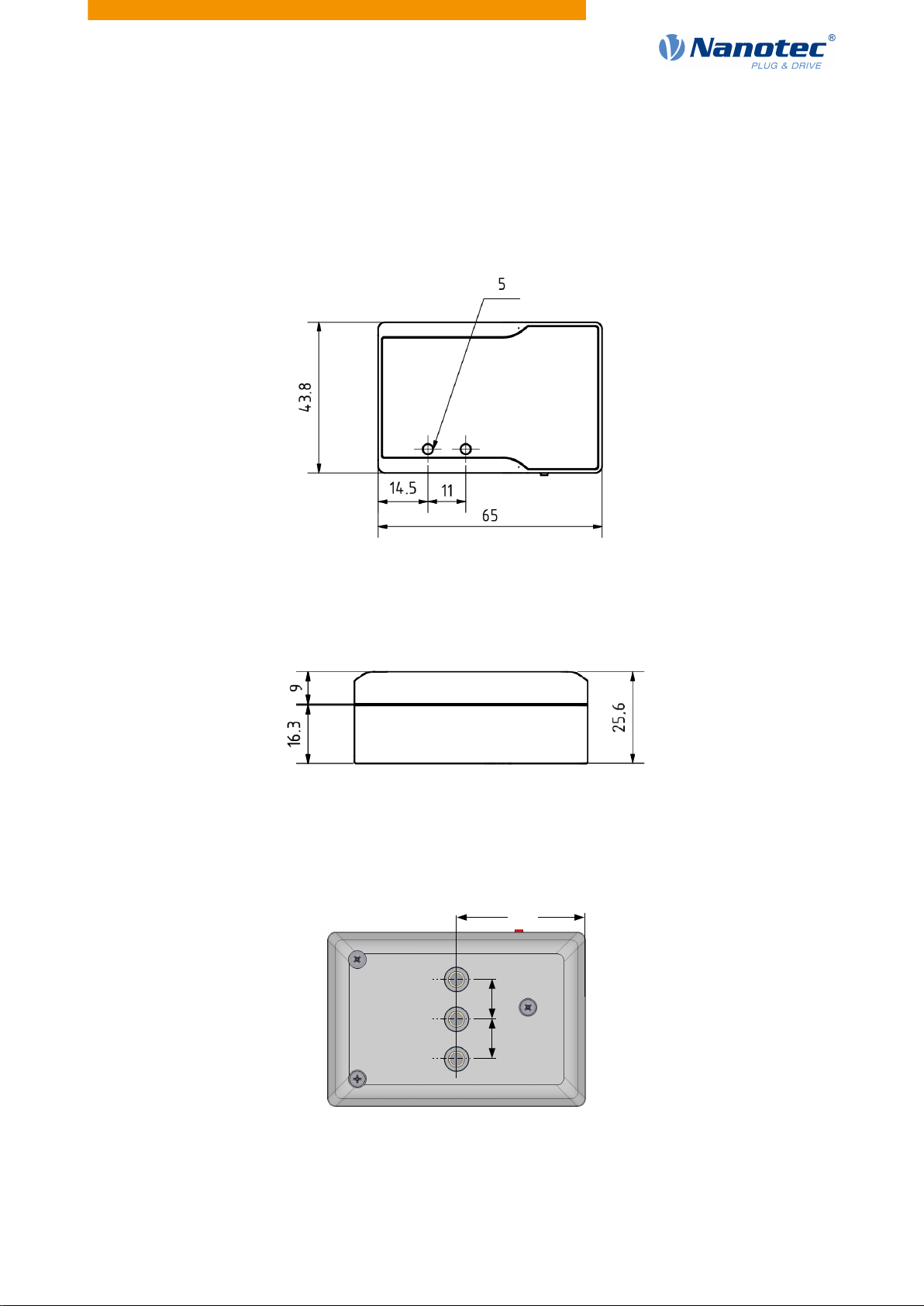
2.1 Dimensioned drawings and installation options..........................................................................................5
2.2 Environmental conditions............................................................................................................................6
2.3 Electrical properties and technical data......................................................................................................6
2.4 LED signaling..............................................................................................................................................6
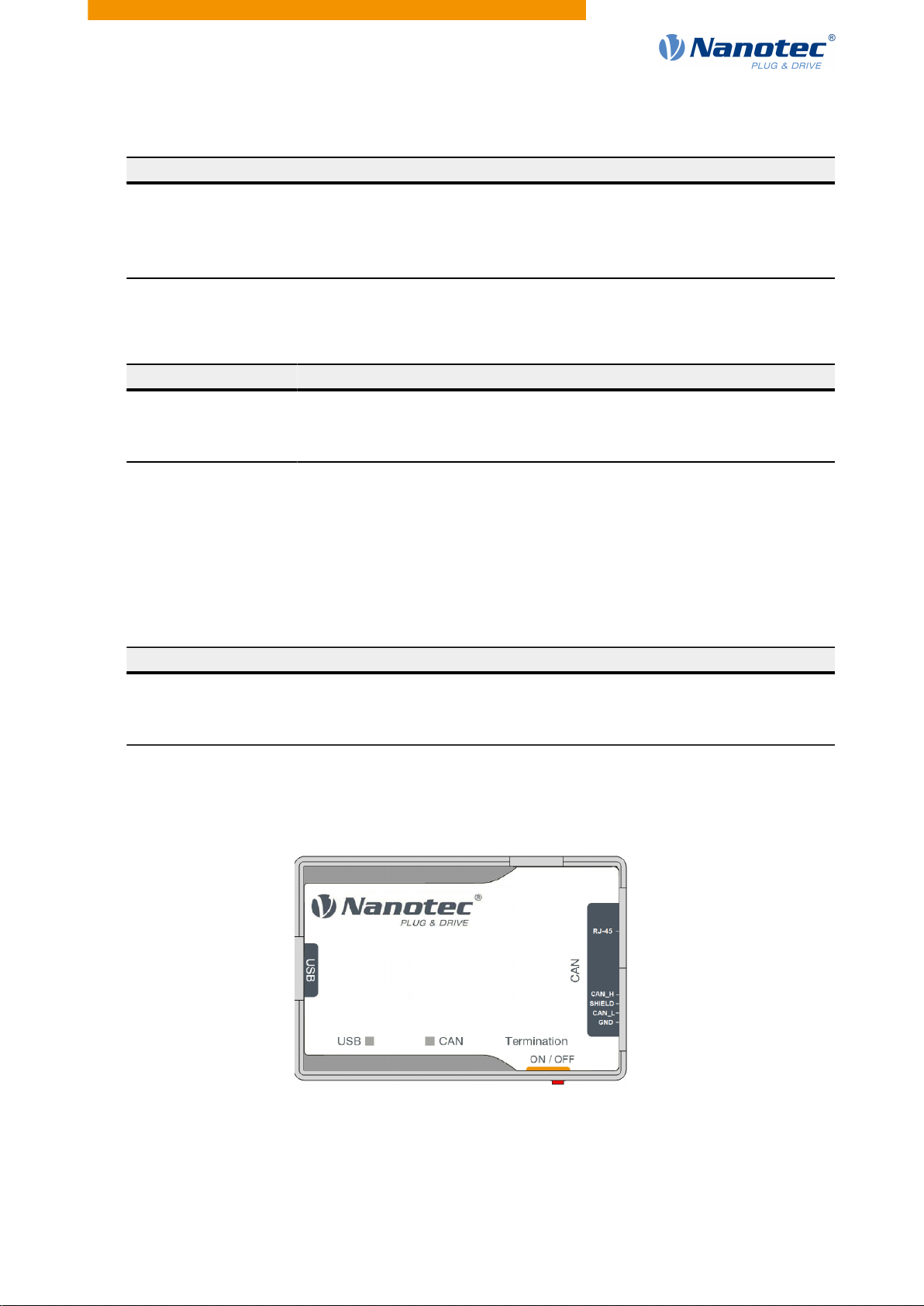
2.5 Pin assignment........................................................................................................................................... 6
3 Installing driver and adapter.........................................................................9
4 Protocol description.................................................................................... 10
4.1 Configuration and initialization..................................................................................................................10
4.2 Commands for reading and writing..........................................................................................................18
5 Error messages............................................................................................21