2
Index
1. MIDA Introduction ............................................................................................................................................................ 3
2. Safety Instructions............................................................................................................................................................. 3
3. Technical Characteristics ................................................................................................................................................... 4
3.1 Performance ............................................................................................................................................................................ 4
3.1 Weight and dimensions .......................................................................................................................................................... 4
3.2 Cable entries ............................................................................................................................................................................ 4
4. MIDA installation .............................................................................................................................................................. 5
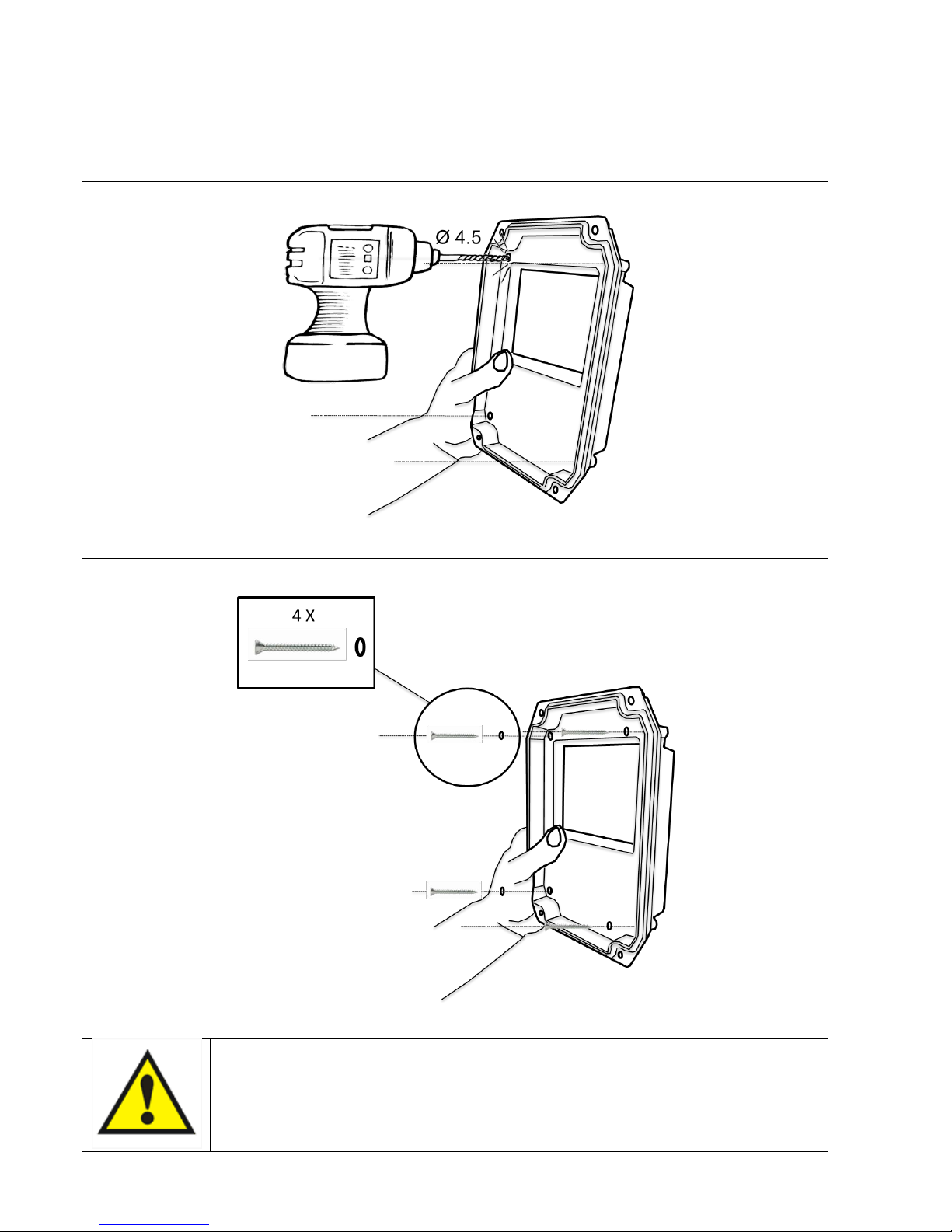
4.1 Mechanical installation ............................................................................................................................................................ 5
4.2 MIDA Installation for constant pressure control ..................................................................................................................... 7
4.2.1 Pressure tank ................................................................................................................................................................ 7
4.2.2 Pressure sensor............................................................................................................................................................. 7
4.3 MIDA installation for differential constant pressure applications ........................................................................................... 8
4.3.1 Sensors wiring ............................................................................................................................................................... 8
4.3.2 Programming................................................................................................................................................................. 8
5. Electric wiring.................................................................................................................................................................... 9
5.1 Protections............................................................................................................................................................................. 13
5.2 Electromagnetic compliance.................................................................................................................................................. 13
5.3 Installation with long motor cables ....................................................................................................................................... 13
6. MIDA use and programming.............................................................................................................................................14
6.1 Monitoring and programming............................................................................................................................................... 15
6.1.1 Monitoring ................................................................................................................................................................. 15
6.1.2 Programming.............................................................................................................................................................. 16
6.2 COMBO operation.................................................................................................................................................................. 23
7. Protections and alarms.....................................................................................................................................................25