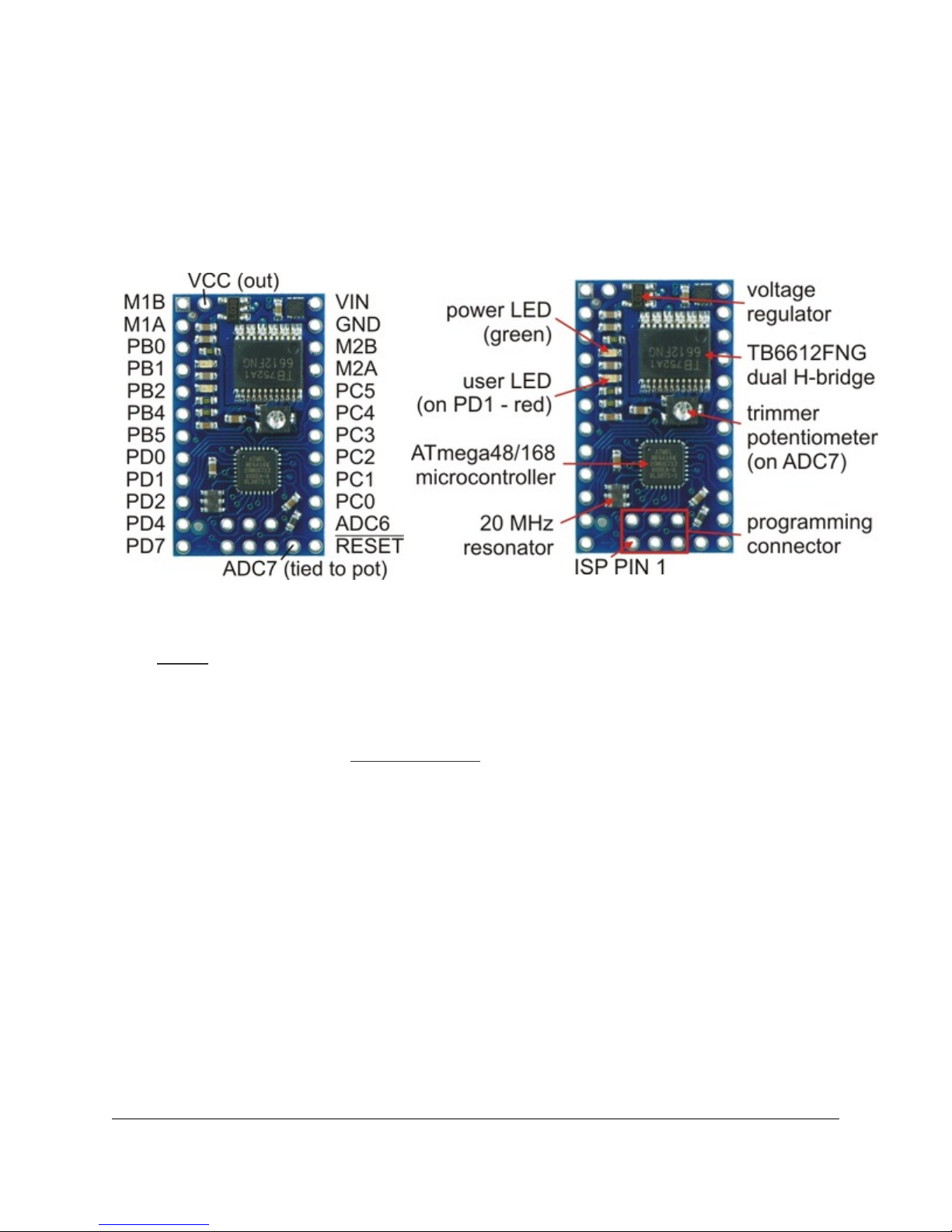
4. Module Pinout and Component Identification
The Baby Orangutan contains a programmable ATmega48, ATmega168, or ATmega328P AVR microcontroller, a
TB6612FNG dual H-bridge for direct control of two DC motors, a 10k user trimmer potentiometer (connected to ADC7),
a green power LED, a red user LED (connected to PD1), a 20 MHz resonator, and a reverse-battery-protection MOSFET,
all containted in a tiny 1.2" x 0.7" 24-pin DIP package. Power pins, one of the motor outputs, and several I/O lines are all
accessible from one side to enable use of the Baby Orangutan as a single in-line pin (SIP) package for applications that
do not require all of the I/O lines.
•VIN should be from 5 to 13.5 V, with an absolute maximum of 15 V.
•RESET can be brought low to reset the controller, but it can otherwise be left disconnected (it is internally pulled
high). This pin is labeled as PC6 in the ATmega48/168/328 datasheet (and on the Baby Orangutan silkscreen).
•Vcc can be used to tap into the Baby Orangutan’s regulated 5V line. This line can supply a total of around 100 mA
at 5 V, but thermal dissipation limits the total Vcc current to around 50 mA at 13.5 V. Note that attempting to pull
too much current from Vcc could permanently damage the Baby Orangutan’s voltage regulator.
•M1A & M1B are the outputs used to drive motor 1. These outputs can supply around 1 A continuous (3 peak).
•M2A & M2B are the outputs used to drive motor 2. These outputs can supply around 1 A continuous (3 peak).
•PC0 – PC5 can be used as both analog inputs and digital I/O lines
•ADC6 & ADC7 are dedicated analog inputs. Note that ADC7 is internally connected to the 10k user trimmer
potentiometer.
•PB0, PB3, PB4, PB5, PD0, PD1, PD2, PD3, PD4, & PD7 are digital I/O lines with alternate functions
determined by the AVR hardware peripherals to which they connect. For example, PD0 and PD1 connect to the
ATmega48/168’s UART and can be configured to function as RX and TX, respectively. Note that PD1 is internally
connected to the red user LED, which may limit its ability to be used as an input (if the source cannot drive the PD1
hard enough, the voltage will be pulled below the AVR’s high threshold by the LED-resistor circuit ).
Pololu Baby Orangutan B User's Guide © 2001–2012 Pololu Corporation
4. Module Pinout and Component Identification Page 5 of 11