IXARC Absolute ROTARY ENCODER WITH
ETHERNET/IP Interface________________1
1. Introduction________________________ 5
1.1 Control and Information Protocol (CIP)____ 5
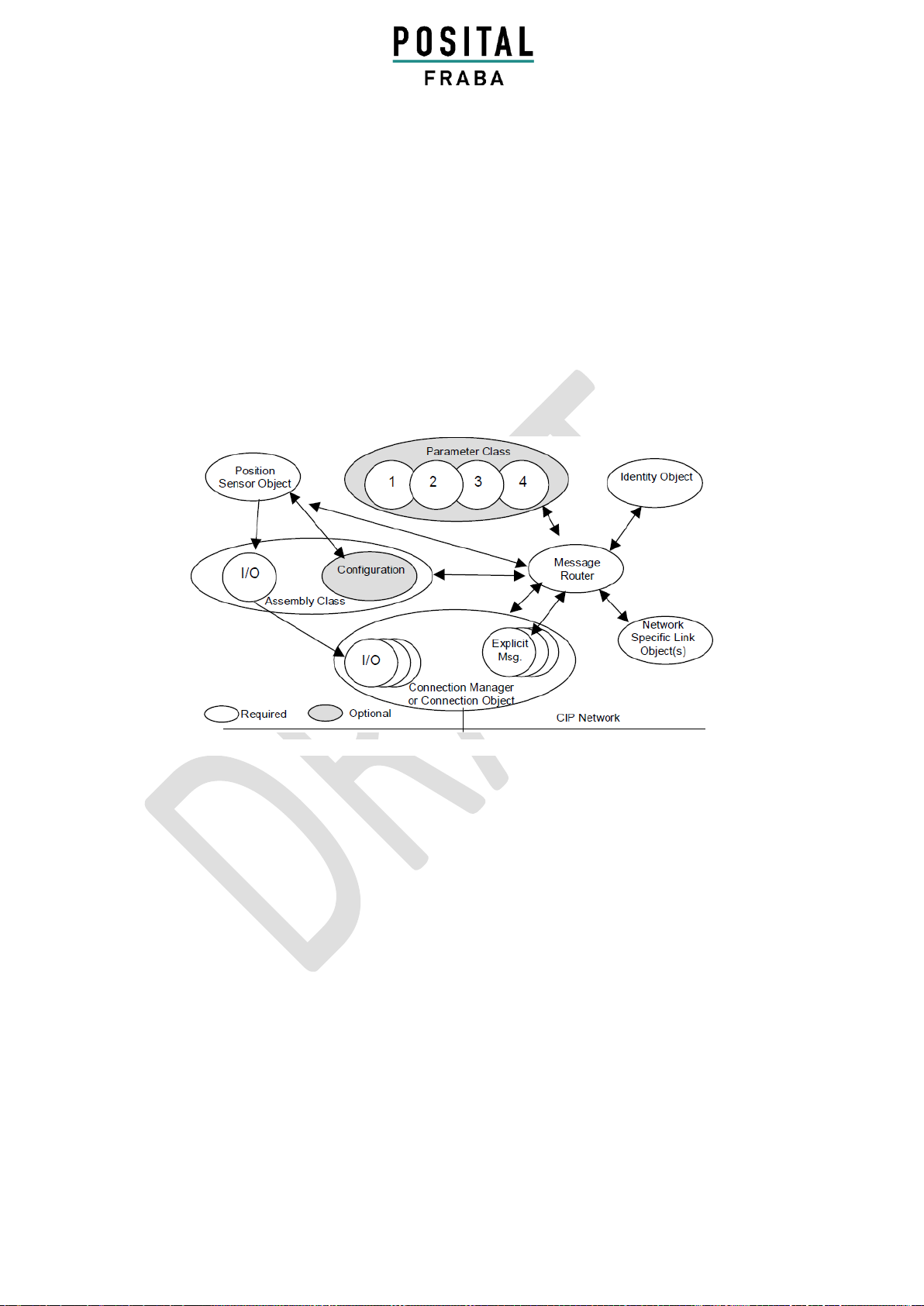
1.2 Object model ________________________ 6
2. Data Transmission ___________________ 6
2.1 Implicit Messaging I/O Connection_____ 7
2.1.1 I/O Assembly Instances_______________ 8
2.1.1.1 Data Attribute Format ______________ 8
2.1.2 Data Mapping ______________________ 9
2.1.3 Data Mapping (Parameter) ___________ 10
2.1.3.1 Data Offset ______________________ 10
2.1.4 Connection Path ___________________ 11
2.2 Explicit Messaging _________________ 12
2.2.1 CIP Common Services for Position Sensor
Objects (Class 0x23hex) __________________ 12
2.2.2 Position Sensor Objects _____________ 13
2.3 TCP/IP Interface Object_____________ 14
2.3.1 Status Instance Attribute (01hex)_______ 15
2.3.2 Configuration Instance Attribute (02hex) 16
2.3.3 Configuration Control Inst. Attribute (04hex)
_____________________________________ 16
2.3.4 Physical Link Object (05hex) ___________ 17
2.3.5 Interface Configuration (06hex) ________ 17
2.3.6 Host Name________________________ 17
2.4 Ethernet Link Object _______________ 18
2.4.0 Instance Attributes _________________ 19
Control Bits ____________________________ 22
Example ______________________________ 22
Use on Transmit data size double (4 bytes)
00000064 for Auto-negotiation = disable on 100
MBaud _______________________________ 22
2.4.1 Interface Flags _____________________ 23
2.4.2 Common Services __________________ 23
2.4.3 Link Object Instances _______________ 24
2.5 Setting parameters with scanners ____ 24
2.5.1 Read out position value _____________ 25
2.5.2 Set preset value____________________ 25
2.5.3 Get preset value ___________________ 26
3 Diagnostics________________________ 27
4 Programmable Parameters___________ 29
4.1 Direction Counting ___________________ 29
4.2 Scaling Function Control_______________ 29
4.3 Resolution per Revolution _____________ 29
4.4 Total Resolution _____________________ 30
4.5 Preset Value ________________________ 30
4.6 Velocity Format _____________________ 31
4.7 Velocity Filter _______________________ 31
4.8 Endless Shaft________________________ 31
4.9 Parameter Control Priority _____________ 32
4.10 Available Alarms and Warnings ________ 32
4.11 Device Level Ring ___________________ 33
5. Installation _______________________ 34
5.1 Electrical connection _________________ 34
5.2 Ethernet cables ______________________ 34
6 Power On_________________________ 35
7 Installation________________________ 35
7.1 Rockwell configuration tools ________ 35
7.1.1 Setting IP-Address (BOOTP/DHCP) _____ 35
7.1.2 Configuration RSLinx Classic™_________ 38
7.1.3 RSNetWorx™ ______________________ 40
7.1.4 Configuration RSLogix 5000 __________ 43
7.2 VLAN Configuration over a Layer 3 Switch
__________________________________ 51
8 FAQ _____________________________ 52
9 Glossary __________________________ 53
10 Revision index ____________________ 55