Revision: 24/03/2011 Page 10of17
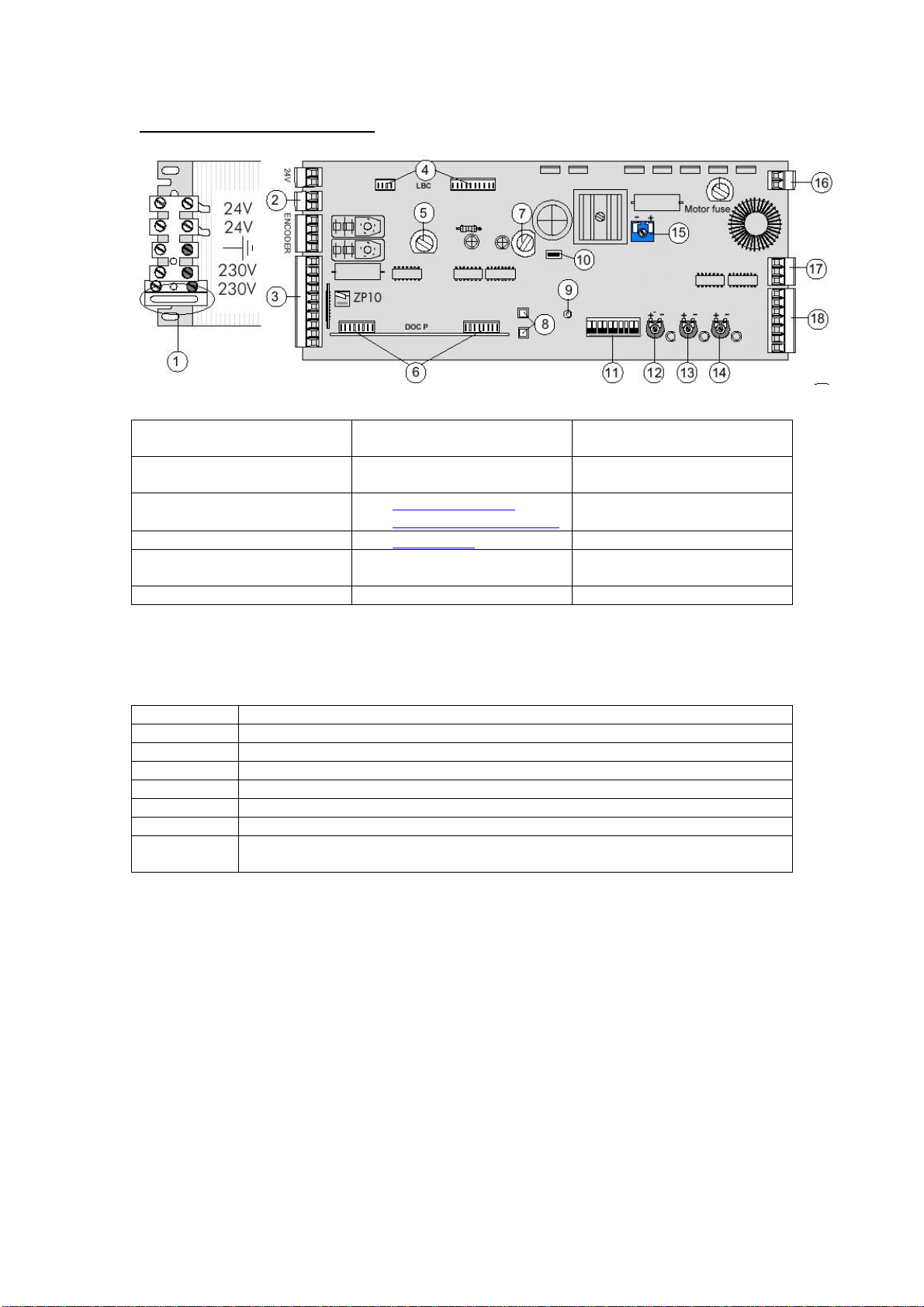
ZP 10 Motherboard Layout
Keytodrawing
1. Fuse -240VAC supply 2. 24 VDC Backup battery
connection 3. 10 wayconnector
4. LBP7 connection for
7032board 5. Fuse 6. DOC PConnector
7. Fuse 8. Chiursura (close)
Apertura (Open)buttons 9. LED
10.Reset Switch 11. Dipswitches 12.VEL – Doorspeed
13.RAL– Slowdown speed 14.TCA– Time at open
position 2-16 seconds 15.Forza– MotorTorque
16.Motorconnections 17.To slave unit(ifused) 18.7wayconnector
Please note: slight variationsoccur, more recent ZP10 boardshavea motorfuse and trimmersare
in slightlydifferent locationsin that items12 13 &14 are adjacent to eachother.
10 wayconnector pinouts(see item3):
Pins Description
10 &11 24 VACaccessorypower-15Wmaximum(600 mAapprox)
1 &2 Shorted out assupplied – use withswitch foremergencyorkeySto disable
2 &R1 Normallyopen contactsforpush button and/orPIR motion detector
2 &R2 Normallyopen contactsforsafetysensoropeningside (set Dipswitch 9 to on)
2 &R3 Not used
2 &M Normallyopen contacts-can be used with manualpush button
2 &C1 Normallyclosed contactsofsafetysensoron closing side – re-open on
closingcycle when contactsopen (set Dipswitch8 to off)
Switching contacts are all voltfree, normallyopenswitches
Amanualpush button orotherPIRwith normallyopen contactsisconnected across pins2 &R1
Safetysensor–opening side setdipswitch9toON, connectsensornormallyopencontact
connectedacross pins2&R2. The operatorwillhalton the opening cycleandcontinue oncethe
objectorperson hasmoved. Acamswitchtoinhibitthe safetysensors at the closed position will
prevent unnecessaryactivation
Safetysensor–closing side set dipswitch8to OFF &safetysensornormallyclosed contact
connectedacross pins2&C1. The operatorwillstop&re-open,remaining intheopenposition–
the redLEDonZP10 boardwill illuminatewhilstthe circuitbetween 2&C1 isopen &theoperator
willnot close.
Providingtheloaddoesnotexceed15Watts(approx600mA)the sensors maybe powered from
the 24VACaccessoryconnection – caution, overload willcausedamage.