Table of Contents
1. Foreword.................................................................................................................................................... 1
2. Before You Begin....................................................................................................................................... 1
3. Safety Precautions..................................................................................................................................... 2
4. Warranty and Scope of Warranty ............................................................................................................... 3
5. Application Environment ............................................................................................................................ 4
6. Functions and Specifications of Data Input Pendant.................................................................................. 5
6-1 Specifications...................................................................................................................................... 5
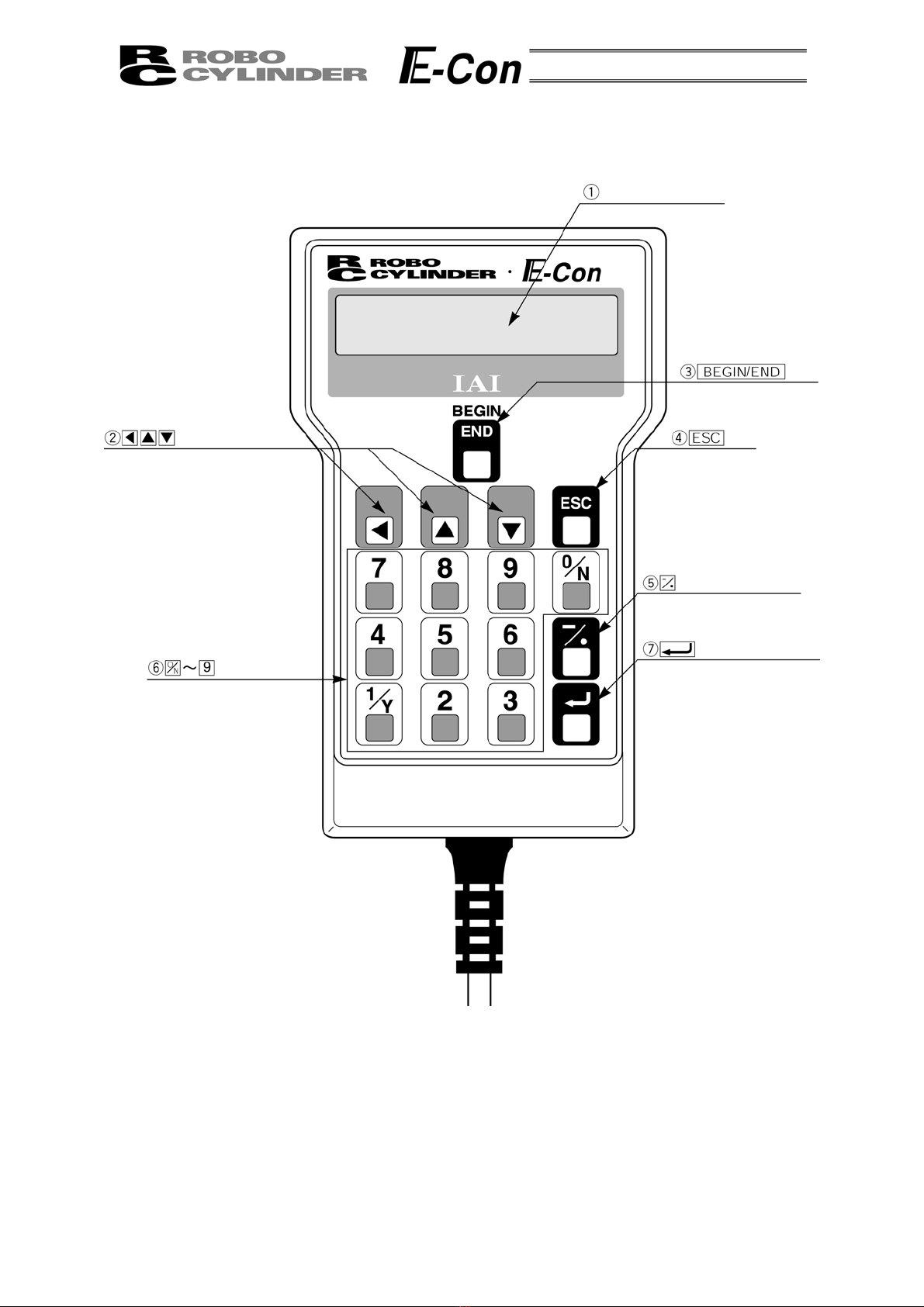
6-2 External View ...................................................................................................................................... 6
6-3 Description of Each Part ..................................................................................................................... 7
7. Connection With the Controller .................................................................................................................. 9
7-1 Connection with the Data Input Pendant............................................................................................. 9
7-2 How to Disengage the Data Input Pendant......................................................................................... 9
8. Operation ................................................................................................................................................. 10
8-1 Initial Screen During Power - UP ...................................................................................................... 12
8-2 Controller Selection (when using multiple units) ............................................................................... 13
8-3 Operation Mode Selection ................................................................................................................ 14
8-4 Edit/Teaching.................................................................................................................................... 15
8-4-1 Edit/Teach Screen ..................................................................................................................... 15
8-4-2 Position Data Table ................................................................................................................... 16
8-4-3 Data Input .................................................................................................................................. 19
8-4-5 Add • Delete............................................................................................................................... 24
8-4-5 Data Modification ....................................................................................................................... 29
8-5 Monitor.............................................................................................................................................. 30
8-6 Error List ........................................................................................................................................... 31
8-7 User Parameter................................................................................................................................. 32
8-8 User Adjustment ............................................................................................................................... 34
8-9 End ................................................................................................................................................... 35
9. Message Area.......................................................................................................................................... 36
9-1 Warning Label Error (Code No. 000h – 07Fh) .................................................................................. 36
9-2 Data Input Pendant Message Level Error ......................................................................................... 37
9-3 Controller Error ................................................................................................................................. 37