Navsight Solution – Hardware Manual NAVSIGHTHM 1 5
2 Solution overview
Navsight is a comprehensive inertial navigation solution,
specifically designed for the survey markets Leveraging
on existing SBGSystems inertial sensors, advanced
algorithms and high performance GNSS technology, it
also adds an incredibly easy to use setup
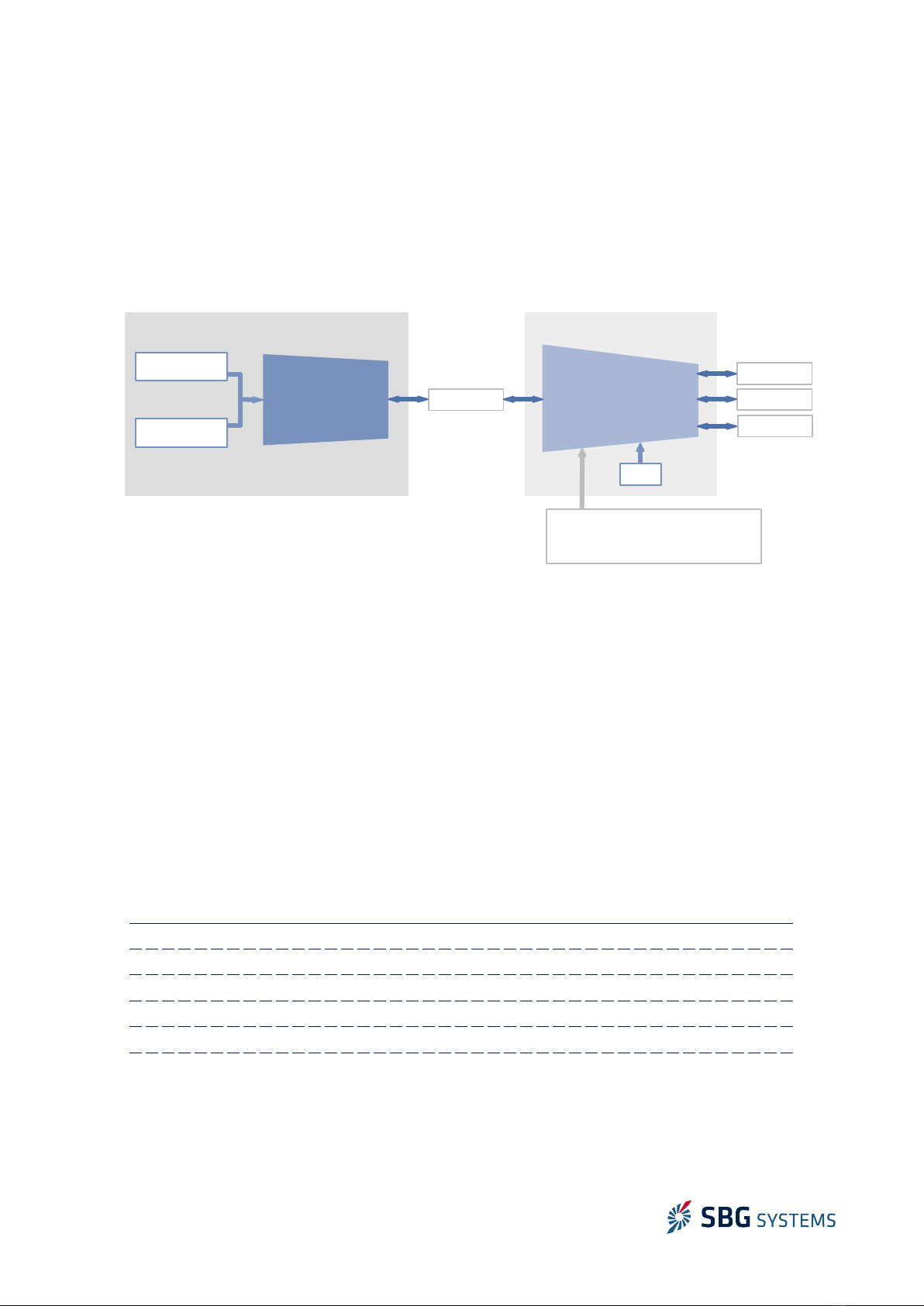
Navsight solution is composed of various components
that can be adjusted or configured according to your
specific application needs:
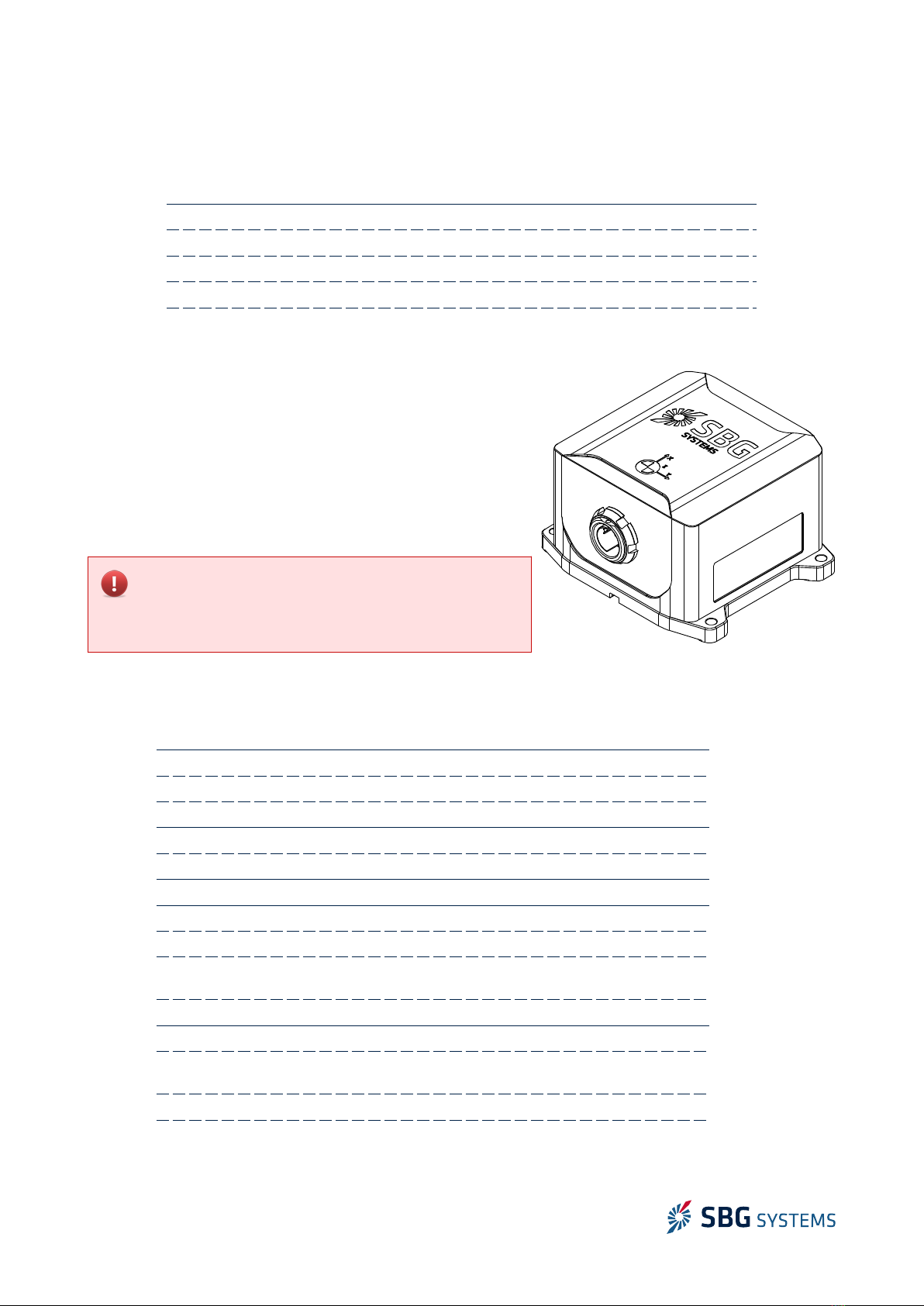
The IMU is the main sensing element and the most important performance driving factor In case of good
GNSS conditions and shallow water or entry level land/air survey, the Ekinox IMU can be selected In case of
more challenging conditions, such as dicult GNSS environments, or high altitude / high depth survey, the
Apogee grade is the sensor of choice to maintain the best accuracy In case of airborne survey with single
antenna setup, or more generally, for ultimate accuracy, the Horizon IMU should be selected All IMUs are
delivered in a rugged IP-68 package, and Ekinox / Apogee IMUs have optional salt water proof titanium
enclosures
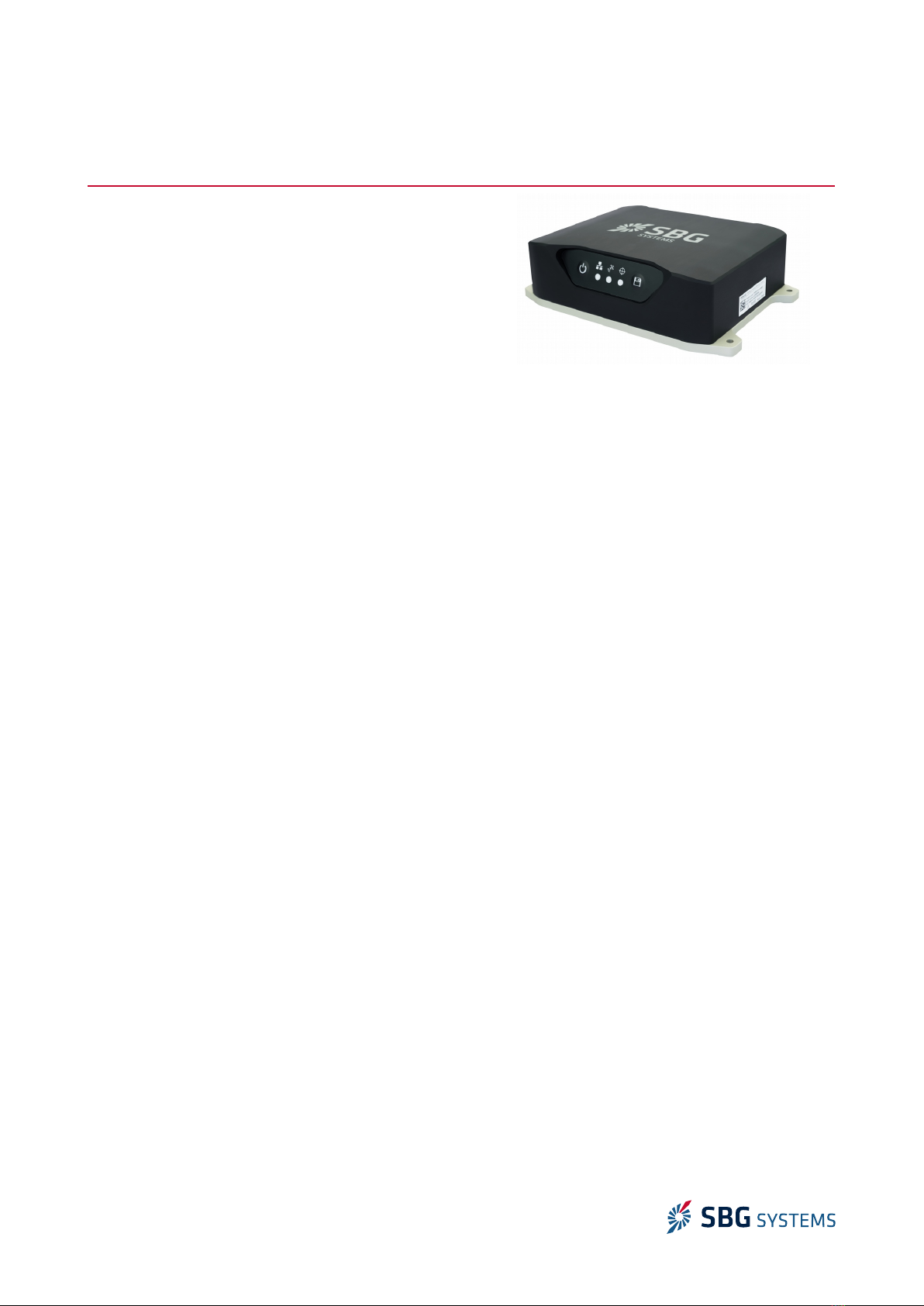
The other main component is the processing unit Available in a rugged IP-67 form factor or easy to
integrate rack enclosure, it embeds all the navigation algorithms processing, a dual antenna, triple
frequency GNSS receiver (optional), capable of PPP and centimetre precision using RTK, and all inputs and
outputs interfaces In addition to the standard Inertial Navigation System outputs (precise position, velocity
and attitude), the marine variant of Navsight Processing unit also delivers precise heave and delayed heave
For some cost sensitive applications, it is also possible to select a simple MRU setup, with only roll, pitch,
yaw and heave outputs
For easier installation, the Navsight processing unit and IMU can be installed at dierent locations: IMU
close to the location we want to track (eg multibeam sonar), and processing unit, close to user
SBGSystems tested successfully installations with more than 50m distance between processing unit and
IMU
The Navsight processing unit can be connected to a wide range of aiding sensors such as GNSS, DVL,
Odometer
To achieve the best performance in every project, specific error models have been implemented to meet
applications requirements and to adapt the solution to your vehicle Sensor configuration is made easy
through the modern embedded web interface
Finally, the 8 GB embedded data-logger enables seamless post processing work-flow with Qinertia
software This makes Navsight solution suitable for the most demanding applications
Navsight solution is fully compatible with integrated Ekinox and Apogee series in terms of protocols,
firmware and features
8/73