Senix Ultrasonic Sensor User manual
Jameco Part number 151482
Ultrasonic Sensor
with RS-232 Output
User's Guide
Jameco Part Number 151482
Senix Corporation, 52 Maple St., Bristol, VT 05443
© 1998 by Senix Corporation

Jameco Part number 151482
Product
Overview
The 151482 product is an ultrasonic sensor designed to
measure the distance between its transducer and a user
target. The distance is measured without contacting the
target object, and is accomplished by sending an
ultrasonic "pulse" and measuring the time for the pulse
"echo" to return from the target object. The measured
time is related to the speed of sound of the pulse. After
the distance (time) is measured, the sensor transmits the
distance as binary data on the RS-232 output. Each count
of the binary data represents a distance of .013536 inches
at nominal speed of sound. The sensor provides data up
to a maximum range of 10 feet.
The 151482 consists of a circuit board, ultrasonic
transducer, transducer connecting cable, 3.5" DOS
compatible floppy diskette, computer connecting cable
and this user manual.
Revision History
Initial product release April 1, 1998
Warranty
Senix, Inc. will repair or replace, at our option, any part
found by us to be defective in material or workmanship if
the product is received by Senix, freight prepaid, within
one year from the date of original shipment to buyer.
Disclaimer and Release. The warranties, obligations and
liabilities of Senix and the remedies of buyer set forth
above are exclusive and in substitution for, and buyer
hereby waives, releases and renounces all other
warranties, obligations and liabilities of Senix and all
other rights, claim, and remedies of buyer against Senix,
expressed or implied, arising by law or otherwise,
including but not limited to: (A) Any implied warranty or
merchantability or fitness; (B) Any implied warranty
arising from course of
performance, course of dealing or usage of trade; (C)
Any obligation, liability, right, claim or remedy in tort,
whether or not arising from the negligence of Senix
(whether active, passive or imputed); and (D) Any
obligation, liability, right, claim or remedy for loss or
damage to any product.
Exclusion of Consequential and Other Damages. Senix
shall have no obligation or liability, whether arising in
contract (including warranty), tort (including active,
passive or imputed negligence) or otherwise, for loss of
use, revenue or profit with respect to any non
conformance or defect in any product delivered under
this agreement, or for any other direct, incidental or
consequential damages.
Governing Law. The terms and conditions of this
agreement shall be governed by the domestic law of the
State of Vermont, U.S.A.
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 2

Jameco Part number 151482
TABLE OF CONTENTS
PRODUCT OVERVIEW...................................................................................................... 2
Revision History................................................................................................................................................... 2
Warranty............................................................................................................................................................... 2
ULTRASONICS OVERVIEW............................................................................................. 4
Introduction........................................................................................................................................................... 4
Advantages............................................................................................................................................................ 4
Typical Applications............................................................................................................................................. 4
GETTING STARTED........................................................................................................... 5
Unpacking............................................................................................................................................................. 5
Specifications........................................................................................................................................................ 5
Mounting............................................................................................................................................................... 5
Beam Pattern......................................................................................................................................................... 6
Orientation............................................................................................................................................................ 6
Connections .......................................................................................................................................................... 6
OPERATION.......................................................................................................................... 7
Starting the sensor................................................................................................................................................. 7
Distance Calculation............................................................................................................................................. 7
Software................................................................................................................................................................ 7
Performance.......................................................................................................................................................... 8
Precautions............................................................................................................................................................ 8
Adjustments.......................................................................................................................................................... 8
IN CASE OF DIFFICULTY................................................................................................. 9
Basic Checkout..................................................................................................................................................... 9
Common Problems ............................................................................................................................................... 9
Repairs and Returns.............................................................................................................................................. 9
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 3

Jameco Part number 151482
151482 - Ultrasonic Sensor User's Guide
Ultrasonics
Overview
Introduction
Ultrasonic sensors measure the distance or presence of a
target object by sensing a sound wave, above the range of
hearing, at the object and then measuring the time for the
sound echo to return. Knowing the speed of sound, the
sensor can determine the distance of the object from the
transducer element.
(1) Ultrasonic pulse transmitted from sensor
(2) Ultrasonic echo returns from target
Advantages
Non-contact
Measures through the air without touching the
target object, at relatively large distances.
Object Ranging
Object distance is measured rather than just the
presence or proximity.
Distance Proportional Output
The sensor's outputs are proportional or related to
the measured target range.
High Resolution
Precise discrimination of target position.
Unaffected by Target's Optical Characteristics
The sensor's operation is not sensitive to ambient
light levels, the target color, or target's optical
transparency or reflectivity.
Sensitive
Detects large and small objects.
Typical Applications
and many more...
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 4
Jameco Part number 151482
151482 - Ultrasonic Sensor User's Guide
Getting
Started
Unpacking
Check that you received the following items:
•Circuit board
•Ultrasonic transducer with connecting cable
•RS-232 Computer Cable
•3.5" DOS compatible floppy diskette
•This manual
Specifications
Circuit Board
Power Input 8-24 VDC @ 40 ma.
Range 6 inches to 10 feet
Output RS-232, Transmit only
Output Format 9600 baud, 8 data bits, 1 stop
bit, no parity
Output Protocol 3 character burst:
#1:55H (sync character)
#2: LSB count data
#3: MSB count data
Resolution 0.013536 inches/count at
room temperature
Temperature 0 to +70 C (32 to 160 F)
Humidity 5-95%, non-condensing
Measurement Period 50 mSec (20 Hz update)
Interface connections Terminal Block
Transducer connection 2-pin Molex
Weight 1.6 oz.
Size 2.85L x 1.85W x 1.25H
Transducer
Type Electrostatic Ultrasonic
Frequency 50 kHz
Beam Shape Conical
Beam Angle 15 degrees total @ 3db down
Temperature -30 to +70 C (-20 to +160 F)
Board Connection Blade terminals
Size 1.69" diameter x 0.5" deep
Weight 0.3 oz.
Mounting
Ultrasonic transducer
The transducer mounts in a 1.54" diameter circular hole
cut into any sheet material. The transducer can be glued
using a resilient compound such as GE Silicone Sealant.
Grounding
If the sheet material is metal, surface contact to
the transducer will connect the surface to the
sensor's ground (PWR-). This is allowable as
long as it doesn't conflict with other wiring.
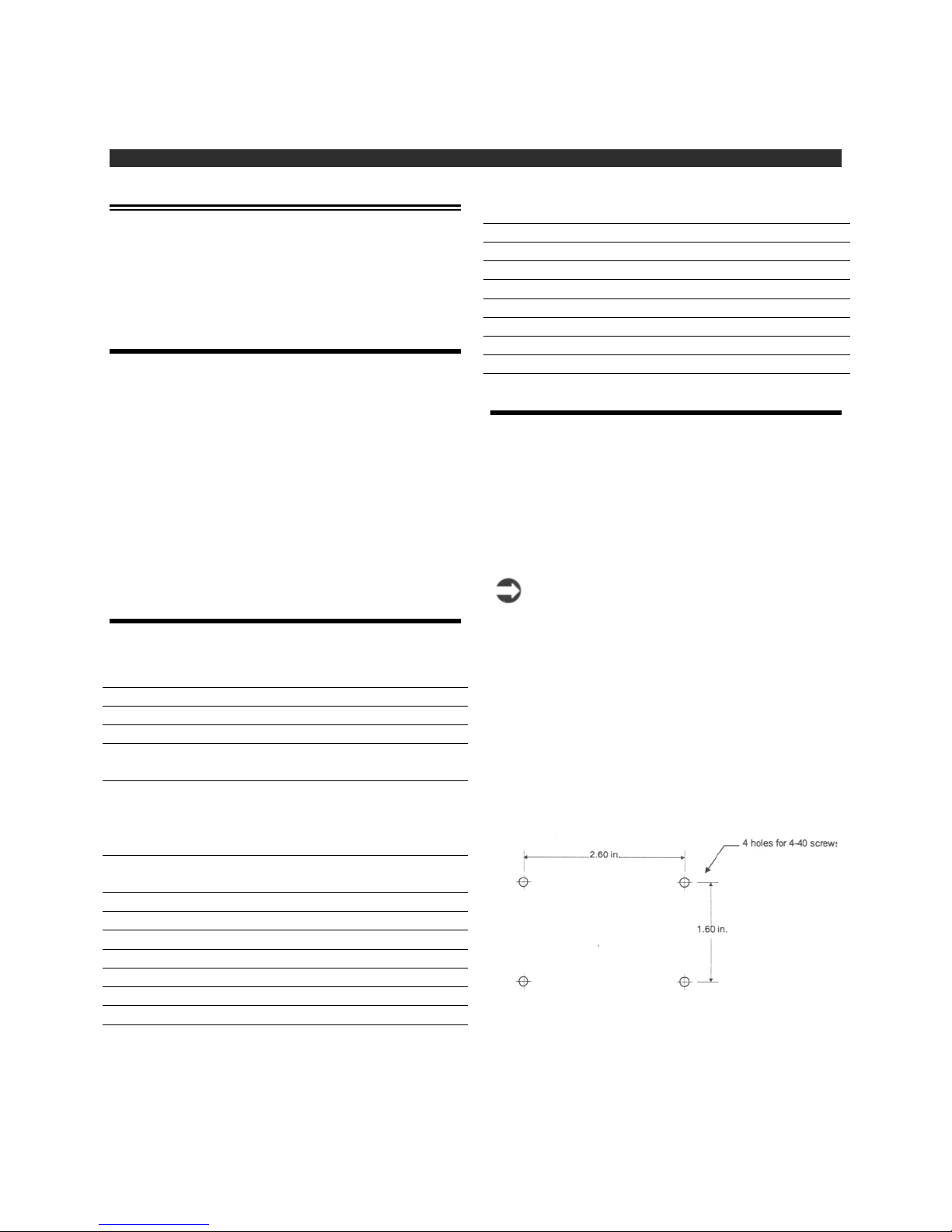
Circuit board
The circuit board mounts on 4 standoffs using 4-40
screws in the following hole pattern:
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 5

Jameco Part number 151482
151482 - Ultrasonic Sensor User's Guide
Beam Pattern
The beam pattern is conical with a total angle of about 15
degrees. The cone starts at the face of the sensor at about
1.5 inches in diameter and grows from there as shown in
the diagram below. The beam pattern is approximate and
represents the boundary where the return echoes are 3db
down.
Orientation
The transducer orientation should be perpendicular to the
target object for best results. The sensor will loose the
target if the ultrasound energy is reflected away from the
transducer rather than back to it. Curved or spherical
objects make good targets. Make sure other unintended
targets are not visible to the sensor.
Connections
Ultrasonic transducer
The ultrasonic transducer is provided with a cable
attached. Connect the transducer cable (2-pin brown
female Molex connector) into the mating Transducer
Connector on the circuit board.
The two BLADE terminals press onto mating terminals
on the transducer. The shield end (ground) should be
attached to the terminal of the transducer's outer shell,
placing the outer shell at ground potential.
Power Input
Connect a +8 to 24 volts DC power supply via the DC +
and GND terminals of the Terminal block Connecting the
power backward will not damage the board. As soon as
you apply power, the Power
Indicator will light and the transducer will begin clicking
repetitively.
RS-232 Data Output
The system provides an RS-232 serial data output on the
TX terminal of the terminal block as shown in the above
drawing. There is no serial data input. The output is
connected as follows to an RS-232 device input:
Sensor Terminal Input Device RS-232 Cable
TX RS-232 In RED
Gnd Ground GREEN
The RS-232 cable included with the sensor connects the
sensor to a standard personal computer serial port
(COM1 or COM2). One end of the cable is a 9-pin
female (DB9F) connector that mates with a standard PC
9-pin COM port connector. The other cable end has 2
tinned wires that connect to the sensor terminal block
listed above in the Sensor Terminal column.
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 6

Jameco Part number 151482
151482 - Ultrasonic Sensor User's Guide
Operation
Starting the sensor
Following installation and connection according to the
preceding sections, the sensor starts running as soon as
the DC power is applied.
When the sensor is running the Power Indicator should
be ON and a repetitive clicking heard from the
transducer.
Distance Calculation
The sensor's measured distance is represented by the data
transmitted on the TX terminal of the terminal block. The
data is contained in 3-characters burst with the following
definition:
#1:55H (sync character)
#2:LSByte of count data
#3:MSByte of count data
Bytes 2 and 3 combined are combined into a single
16-bit word representing a distance proportional value as
shown below:
The distance can be calculated from the 16-bit data value
as follows: Inches = Value * 0.013536
The maximum count value is about 8865, representing a
distance of 10 feet (120 inches). Targets closer than 6
inches will generally return values down to about 5.2
inches. If the sensor does not detect a target within 10
feet, the sensor transmits a zero value.
Software
A QuickBasic example program is provided on the
included floppy disk that will read the sensor data output
and display the measured distance on a personal
computer screen. The following files are provided on the
diskette:
JAMECO1.EXE -- DOS executable program
JAMECO1.BAS -- QuickBasic source code for
JAMECO1.EXE showing how the programming and
display of sensor data are accomplished.
Run the program as follows:
1. Insert the floppy disk into the computer. The
program can be run from floppy, or the 2 files listed
above can be copied to a subdirectory on the
computer's hard drive and run from there.
2. Connect and power the sensor as described
previously in Getting Started.
3. Run the program by typing JAMECO1 at the DOS
prompt. This runs the executable file. The program
can also be run as a DOS task under Windows 3.1
or Windows 95.
4. The program will first display "Which COM port is
the sensor connected to (1/2)?" Type the number 1
or 2 depending upon which port you are using, then
press the <Enter> key.
5. The program now displays distance. A zero value is
displayed if no target is detected within 10 feet. The
data is updated every 50 mSec. To exit the
program, hit any key.
Refer to the source code file JAMECO1.BAS to
understand how to read sensor data and calculate the
distance.
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 7

Jameco Part number 151482
151482 - Ultrasonic Sensor User's Guide
Performance
Update Rate
The sensor measures distance repetitively at an interval
of approximately 50 milliseconds. This is the interval
between the "clicks" heard from the transducer. After
each measurement, the 3 characters of data are
transmitted on the RS-232 output.
Target Considerations
The target must reflect the ultrasound energy back to the
sensor. Sensor performance will be affected by the
strength of the "echo". Flat surfaces are best when
perpendicular to the beam direction. Curved surfaces are
generally good targets because a portion of the energy is
generally reflected directly back to the sensor.
Low-density materials including some foams, cloth and
powders may exhibit reduced detection range, or can
absorb or be transparent to ultrasound. In many cases
these materials are easily detected, so testing a material
sample is recommended. Increasing the sensor's gain
using the sensitivity adjustment may be required.
Temperature Effects
The most significant factor that affects measurement
accuracy is temperature. At room temperature, a change
of 10 degrees will result in approximately 1% change in
the speed of sound and therefore the same change in the
distance output. This model sensor does not compensate
for temperature affects.
Precautions
•Keep unintended targets from transducer's field
of view. Keep the beam pattern in mind.
•Keep transducer away from ultrasonic noise
sources, such as pressurized air nozzles
Adjustments
Sensitivity
This adjusts the electronic sensitivity to the strength of
the ultrasonic echo being returned from the target object.
Very small or sound absorbing targets may not send a
very strong echo and therefore may require increased
sensitivity for stable detection. The sensitivity
potentiometer is located next to the terminal block on the
solder side of the circuit board. The unit is shipped at
mid range and in general it does not require adjustment.
Sensitivity can be increased by rotating the potentiometer
clockwise and decreased by counterclockwise rotation.
Full rotation of the pot is 180 degrees.
Ultrasonic Tuning Adjustments
The ultrasonic tuning adjustments consist of a
transformer T1 (silver case) and inductor L1. These
generally do not require adjustment unless the cable
length to the transducer is lengthened.
To adjust these components:
1. Put an oscilloscope probe on test point TP1 and
set the scope to trigger on the transmitted pulse.
This test point is a hole in the PCB that is
labeled on the component side of the board.
2. Using delayed sweep, monitor a target echo
signal and adjust T1 for maximum amplitude.
3. Using the same signal as in step 2, adjust L1 for
maximum amplitude.
Transducer Cable Length
As the cable length is increased, sensitivity will
decrease. A practical cable maximum length is
20 feet, and longer cables should be shielded in
electrically noisy areas.
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 8
Jameco Part number 151482
151482 - Ultrasonic Sensor User's Guide
In Case of
Difficulty
Basic Checkout
With DC power applied to the sensor the Power Indicator
should be ON and a clicking sound should be heard from
the ultrasonic transducer.
If the Power Indicator is not ON check the power
connections. The board will not be damaged by a reverse
polarity connection.
If the Power Indicator is ON but the sensor is not
clicking, check the cable connections between the circuit
board and ultrasonic transducer. Look for broken or
shorted wires or loose connectors.
Common Problems
Output stuck at short distance value
1. An object is near the front of the sensor that is
being detected, possibly associated with the
mounting arrangement.
2. The sensor is "self-detecting" its own transmit
signal. Reduce the sensitivity by turning the
Sensitivity adjustment counterclockwise.
3. No target is being detected. Place a target in
front of the transducer at a known distance and
test for a reasonable voltage value.
Repairs and Returns
If you need to discuss a problem or return a unit please
call the following number for technical support:
Jameco Electronics
(415)592-8097 (voice)
(415)592-2503
Senix Corporation, 52 Maple St., Bristol, VT 05443
Page 9
Table of contents
Other Senix Accessories manuals


















