STEAM Train STEAMbot V1.0 User manual
STEAMbot V1.0 User Guide
STEAMbot V1.0 User Guide
Introduction
Welcome to the world of STEAMbot robots! We at The STEAM Train want to thank you for
getting a STEAMbot robot kit. We believe that any child that wants a robot should be able to
afford one. This kit will help you learn more about Science, Technology, Engineering, Art and
Math (STEAM). We hope you will have lots of fun putting your robot together and learning how
to program it. Your efforts will be rewarded and give you opportunities for a better future."
This guide has the following chapters:"
1. Assembly of Your STEAMbot – covers how to assemble your STEAMbot robot."
2. STEAMbot Controller – provides a description of the STEAMbot Controller, the heart of you
robot."
3. Software Installation – tells you how to install the required software so you can program
your STEAMbot robot."
Warning
Although the STEAMbot has been carefully designed and manufactured, the STEAMbot has
fragile components. Dropping it or pushing on the Ultrasonic Sensor Bracket may cause it to
crack or break. In addition, the header pins of the STEAMbot Controller can pierce your skin if
you are not careful. The pins are also easy to bend. So please handle your STEAMbot with
care."
Assembly of Your STEAMbot
Parts
Figure 1 shows you all the parts that should be in your kit. If any part is missing, please email
2017 © Copyright The STEAM Train
1

STEAMbot V1.0 User Guide
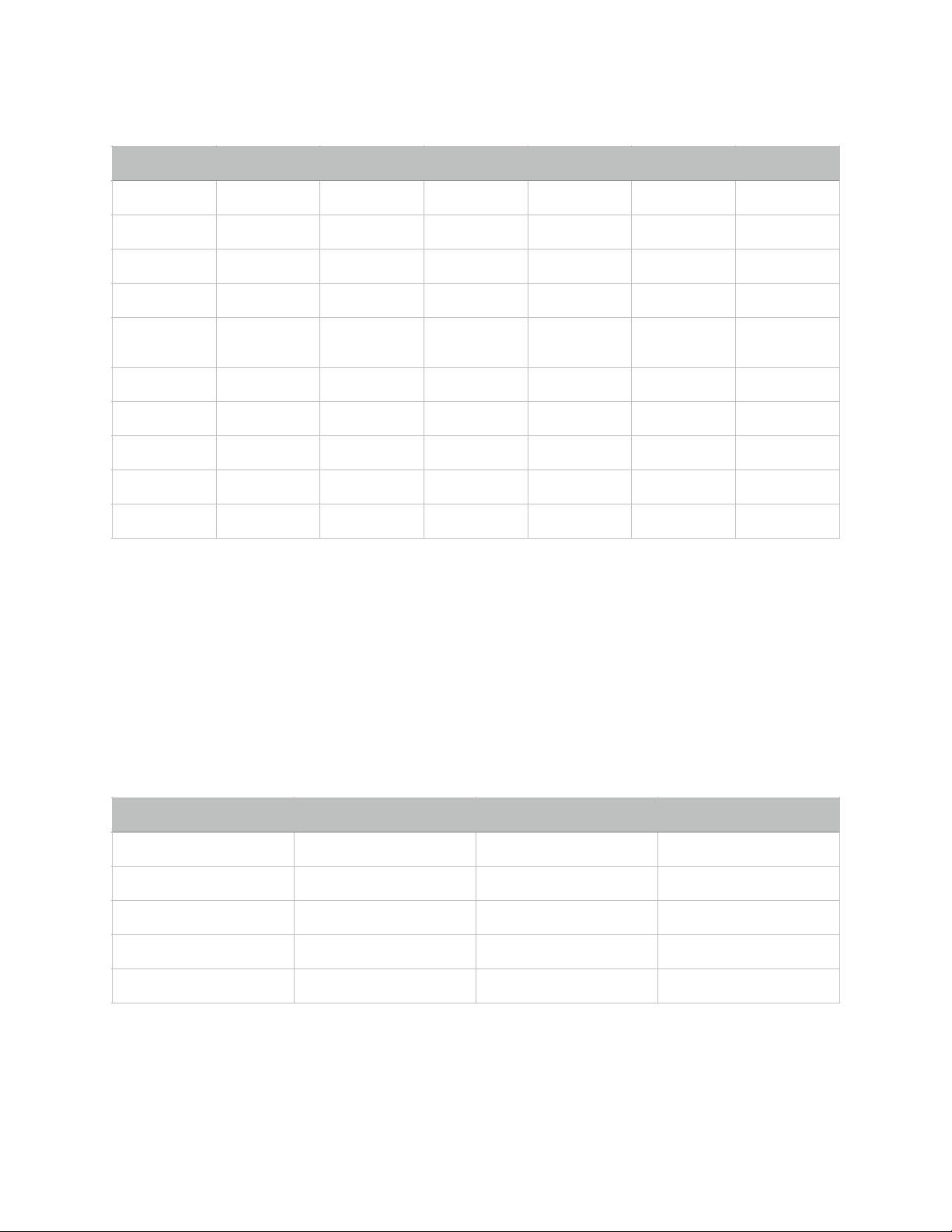
The following table has the parts and quantities."
Table 1, List of Parts
Part
Quantity
STEAMbot Chassis
1
STEAMbot Controller
1
Controller Mount
1
DC Motor and Wheel
2
Battery Holder
1
Foam Tape
1
Ball Caster
1
Phillips Screwdriver
1
#4 1 inch screw
2
#4 3/8 inch screw
8
2017 © Copyright The STEAM Train
2
Figure 1: STEAMbot Kit Parts

STEAMbot V1.0 User Guide
Parts Not Included
The following parts are needed but not supplied in the kit:"
•Four AA batteries – see the section on batteries on page 11."
•A smart phone with Bluetooth LE support."
•A small flat screwdriver."
•A Windows or MacOS computer. Needed only if you want to program the STEAMbot."
Assembly Steps
Please do not add the batteries to the battery
holder until after you have assembled the
STEAMbot. To assemble your STEAMbot,
perform the following steps:"
1. Place the chassis flat on a table, with the
motor mounts farthest to you and the ball
caster mount closest to you, see Figure 2."
2. Remove the wheel from one of the DC
motors. Keep track of which wheel belongs
to which motor."
3. Take one 1" screw and attach the DC motor
to the left motor mount on the Chassis.
Ensure that the wires point to the left. Make
sure you tighten the screw so the motor
does not wiggle left and right1."
4. Remove the wheel from the remaining DC
motor, remembering to keep track of the
wheel."
5. Take the remaining 1" screw and attach the
DC motor to the right motor mount on the
Chassis. Ensure that the wires point to the
right. Make sure you tighten the screw so
the motor does not wiggle."
6. Take one 3/8" screw and attach one side of
the ball caster to the ball caster mount of
the Chassis."
Ultrasonic Sensor and Wire
1
Ultrasonic Sensor Bracket
1
USB Cable
1
Part
Quantity
2017 © Copyright The STEAM Train
3
Figure 2, STEAMbot Chassis

STEAMbot V1.0 User Guide
7. Take one 3/8" screw and attach the other
side of the ball caster to the mount. Make
sure you tighten both screws so the ball
caster does not wiggle."
8. At this point, your robot should look similar
to Figure 3."
9. Take the left wheel and push it onto the
axle of the left motor. If you look closely,
you'll see that the wheel has an oblong
shape that aligns with the shape of the
axle."
10. Take the right wheel and push it onto the
axle of the right motor."
11. Push the wires from both motors through
the opening in the Chassis."
12. Flip the Chassis over and it should be fairly
level on the two wheels and the ball caster."
13. Take the controller mount and align it over
the four holes on the backside of the
Chassis. It should similar to Figure 4."
14. Place the STEAMbot Controller over the
controller mount and make sure all the
holes align."
15. Take four 3/8" screws and screw down the
STEAMbot Controller to the Chassis."
16. Push the wire from the left motor onto the
JST connector labeled “MTRA”."
17. Push the wire from the right motor onto the
JST connector labeled “MTRB”."
18. Your robot should look similar to Figure 5."
19. Using the two remaining 3/8" screws,
attach the ultrasonic sensor bracket to the
front of the chassis as shown in Figure 6."
20. Using a small flat screwdriver, loosen both
screws on the Battery Terminal Block
(labeled BATT)."
21. Take the battery holder and attach the
black wire to the screw labeled with a "-" of
the BATT terminal block."
22. Attach the red wire of the battery holder to
the screw labeled "+" of the BATT terminal
block."
23. Peel offthe backing of one side of the
foam tape. Place the foam tape in the
center of the battery holder."
24. Peel the reminder backing of the foam tape
and carefully place the battery holder on
the front of the Chassis (over the motors),
with the wires facing the STEAMbot
Controller and centered as best possible. Your robot should look similar to Figure 7."
25. Make sure the power switch is in the OFF position (towards the ball caster)."
26. Insert four AA batteries1 in the battery holder, ensuring the correct polarity."
2017 © Copyright The STEAM Train
4
Figure 3, Chassis, Motors and Ball Castor
Figure 4, Top Chassis with Controller Mount

STEAMbot V1.0 User Guide
27. Take the ultrasonic sensor (with the
attached four conductor wire), align it
with the holes on the ultrasonic sensor
bracket and press fit the sensor into the
bracket. The wire goes to the top."
28. Take the other end of the wire from the
ultrasonic sensor and plug each
conductor into the pins labeled “P5”.
Note that the colors of the four
conductor wire differ between kits. The
important thing to remember is to keep
them in the same order on the sensor as
on the pins of P5. Your robot should look
similar to Figure 8."
29. Push the power switch to the ON
position (towards the wheels). A red LED
near the speaker on the STEAMbot
controller will turn red. The LED near the
RESET button will will blink green for
about 1 second. You will hear a beep,
the LED will turn several colors and then
stay blue."
30. Push the RUN button and you should
hear a beep."
31. Congratulations, your STEAMbot is
ready to be controlled via a smart
phone (iPhone or Android) or to be
programmed by you! If you don’t have a
smart phone, see below for the different
modes. Now go have some fun with
your STEAMbot robot!"
2017 © Copyright The STEAM Train
5
Figure 5, Chassis with Controller
Figure 6, Ultrasonic Sensor Bracket

STEAMbot V1.0 User Guide
Where Is The Front Of The STEAMbot?
If you correctly followed the assembly steps above, the front of your STEAMbot is where the
wheels are and the rear is where the ball caster is. However, if you wish to flip this configuration
so that the ball caster is the front and the wheels are the rear, just swap to which motor
terminal blocks the wires from the motors are connected. If you write your own programs you
will have to adjust what forward means."
2017 © Copyright The STEAM Train
6
Figure 7, Battery Holder
Figure 8, Completed STEAMbot

STEAMbot V1.0 User Guide
Batteries
The STEAMbot robot has been tested with alkaline batteries and with Ni-Zn rechargeable
batteries. The STEAMbot does NOT support Ni-Cd or Ni-MH rechargeable batteries. These
batteries only provide 1.2 volts each as compared to the 1.5 volts produced by alkaline
batteries or the 1.6 volts provided by Ni-Zn batteries. Four Ni-Cd or Ni-MH provide only 4.8
volts which is not enough to reliably power the STEAMbot."
Modes
The default program that comes with the STEAMbot robot provides the following two modes:"
1. Bluetooth mode – in this mode, the STEAMbot is controlled by a smartphone using the
builtin Bluetooth LE module. When first powered on or after a reset, this is the mode the
STEAMbot is in."
2. Cat mode – in this mode, the STEAMbot acts similar to a cat. Put an object in front of the
STEAMbot (your hand, your shoe, a broom or something similar). At a certain distance, the
STEAMbot will follow the object. However, if the STEAMbot gets too close to the object, it
will back away from the object."
To change modes, push the STOP button. You will hear a single beep when transitioning from
Cat mode to Bluetooth mode. You will hear a beep and then a higher pitched beep when
transitioning from Bluetooth mode to Cat mode."
STEAMbot Controller
The STEAMbot is controlled by a controller board that provides all the required functions to
control the robot but also allows you to expand your robot by adding additional sensor and/or
actuators. It can easily be programmed by the Arduino IDE (see the next chapter). It has a 32-
bit STM32F103CBT6 ARM microcontroller with 128 KB FLASH memory (to store your
programs), 20 KB of RAM (used while running your program to store data that changes) and 17
general purpose inputs and outputs (GPIOs). There are two GPIO that are assigned to the
Ultrasonic Sensor that comes with the kit."
The following functionality is built into the controller:"
•An RGB LED that supports 8 different colors."
•A speaker that can produce a variety of different notes and beeps."
•Two H-bridge controllers for controlling 2 DC motors."
•A Bluetooth LE module for communications with external devices such as smart phones."
•Two pushbuttons that can be used by programs you write."
General Purpose Input and Outputs
All the GPIOs are available on male pin headers, grouped in different connectors. Each
connector has power and ground to make it easy to connect sensors and actuators. The
following table lists the header and pins."
2017 © Copyright The STEAM Train
7
STEAMbot V1.0 User Guide
* The default STEAMbot program expects the Ultrasonic Sensor to be connected on P5. If you
write your own program and will not need the Ultrasonic Sensor, you can use the GPIO pins on
P5."
** Default PWR is 5V but can be changed to 3.3V by cutting trace of JP1 to 5V and soldering
wire to 3.3V (labeled “3V” on the board)."
JTAG
The Controller board also has a JTAG connector (P4) that is useful for low level debugging.
Very few persons will need to use this connector. The following table provides the pinouts."
This table is provided for completeness and can generally be ignored."
Table 2, Pin Headers
Header
Pin 1
Pin 2
Pin 3
Pin 4
Pin 5
Pin 6
P5*
+5V
PA14
PA13
GND
-
-
P6
PB6 (SRV2)
+5V
GND
-
-
-
P7
PB7 (SRV1)
+5V
GND
-
-
-
P8
+5V
PB7
PB6
GND
-
-
P9
PWR**
PB15/
MOSI2
PB14/
MISO2
PB13/SCK2
PB12/SS2
GND
P10
PWR**
PA10/RX1
PA9/TX1
GND
-
-
P11
PA8
PWR**
GND
-
-
-
P12
PB5
3.3V
GND
-
-
-
P13
3.3V
PA11/RX3
PB10/TX3
GND
-
-
P14
PB2
3.3V
GND
-
-
-
Table 3, JTAG
Pin
Signal
Pin
Signal
1
3.3V
2
PA13/JTMS
3
GND
4
PA14/JTCK
5
PB4/NJTRST
6
PB3/JTD0
7
GND
8
PA15/JTDI
9
GND
10
NRST
2017 © Copyright The STEAM Train
8
STEAMbot V1.0 User Guide
Software Installation
You can program your STEAMbot with the Arduino Integrated Development Environment (IDE)
and some additional software and libraries. You must know C/C++ in order to program your
STEAMbot. In the near future, you will be able to program your STEAMbot with a drag-and-
drop programming environment such as Scratch or other similar environment."
Please follow the following steps to install all the required software:"
1. On Windows, install the software from the Microsoft Store. On a Mac, download the
Arduino IDE from https://www.arduino.cc/en/Main/Software. Refer to the https://
www.arduino.cc/en/Guide/HomePage for the instructions on how to install the software."
2. Start the Arduino IDE. Open up the Preferences dialog. On Windows it’s under File →
Preferences."
3. In the text field for Additional Boards Manager URLs enter “http://dan.drown.org/
stm32duino/package_STM32duino_index.json”. Click the OK button."
4. Click on Tools →Board →Boards Manager. When the Board Manager dialog box appears,
enter “maple” into the “Filter your search...” text box."
5. Select the “STM32Fxx/GD32F1xx boards by stm32duino” option and click “Install”."
6. The installation process may take several minutes. When completed, click “Close”."
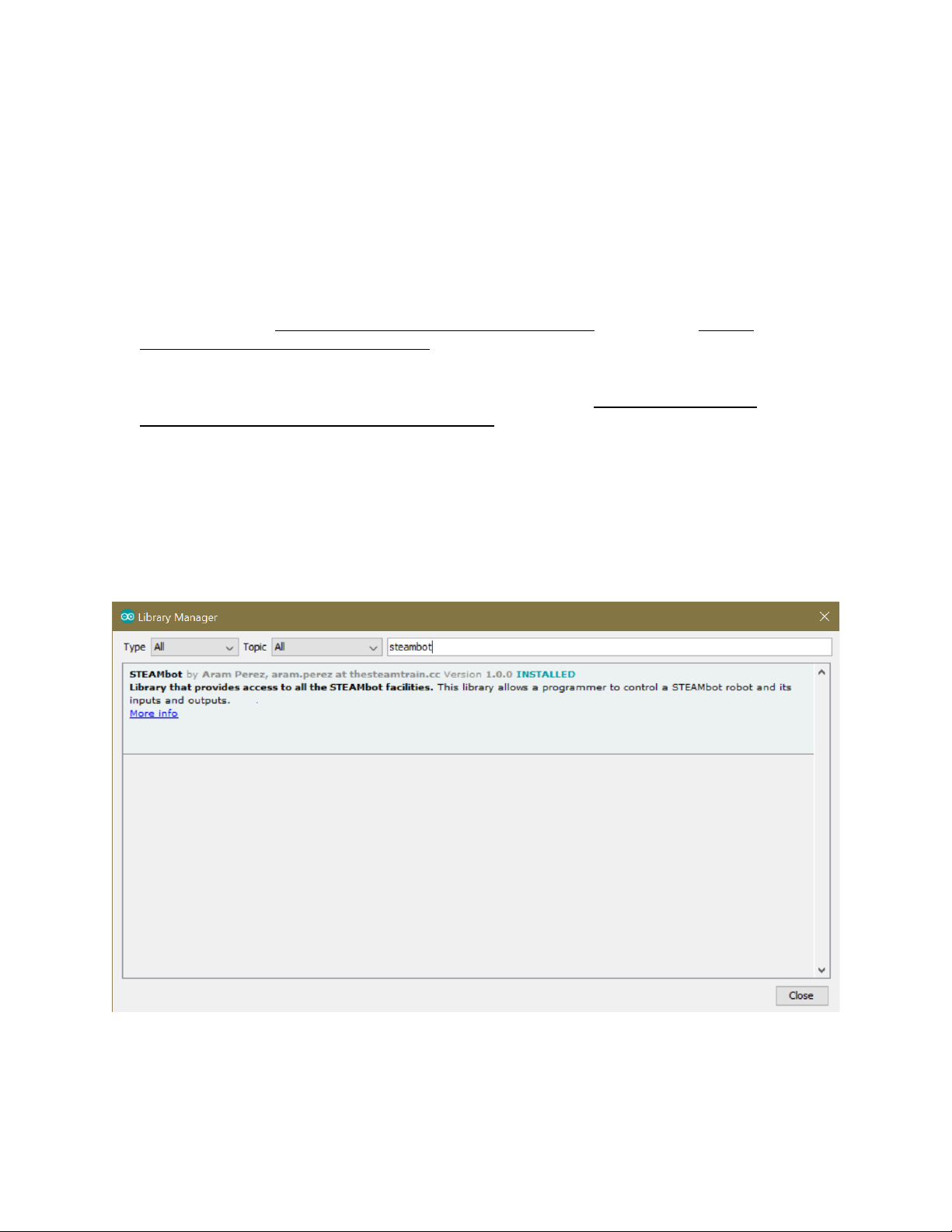
7. Click on Sketch →Include Library →Manage Libraries..."
8. When the Library Manager dialog appears, enter "steambot" into the "Filter your search..."
text field. Select the STEAMbot library and click install. It will take a few seconds to install
the library and you should see the following."
9. Click the Close button."
10. Click on Tools →Board: and select "Maple Mini"."
11. Click on Tools →Bootloader Version and select "Bootloader 2.0 (20k RAM, 120k Flash)"."
2017 © Copyright The STEAM Train
9

STEAMbot V1.0 User Guide
12. On Windows, click on Tools →Port and select the COM port which has "(Maple Mini)" after
it."
13. You can now look at the different examples we provide by selecting File →Examples →
STEAMbot, including the DefaultSTEAMbot example which is the default program running
when you first get your STEAMbot and power it up."
14. You are now ready to create your very own programs your STEAMbot to do other things!
And please share them on our web site."
2017 © Copyright The STEAM Train
10
Table of contents
Other STEAM Train Toy manuals











 Assembly manual")







