3
Please read this manual carefully before setting up and using your unit. The electronic version of this document is the controlled copy. Therefore,
all printed versions of this document are uncontrolled.
1. SubC equipment is designed to work at various depth ratings on unmanned vehicles. Designs are tested to their full pressure rating.
Production units are pressure-tested to a nominal rating to ensure no leaks. If using our equipment on vehicles containing people, you
do so at your own discretion as SubC does not certify equipment for direct human contact underwater. Manned submersibles require
equipment to have additional pressure-testing to ensure safety.
2. The equipment has been designed for subsea usage. Observe the operating temperature specifications before prolonged usage in air
(do not operate for >10 minutes in air). Run equipment in water.
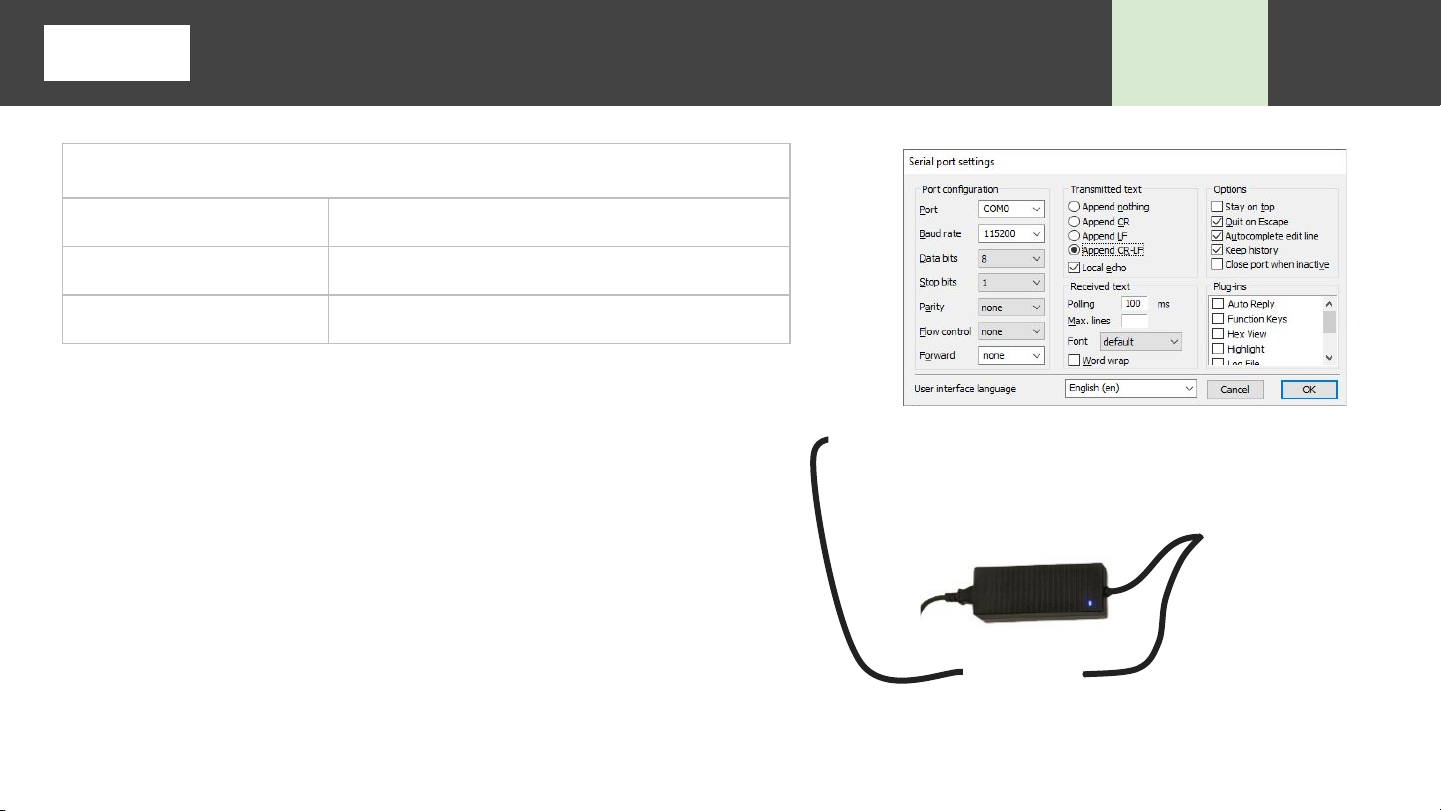
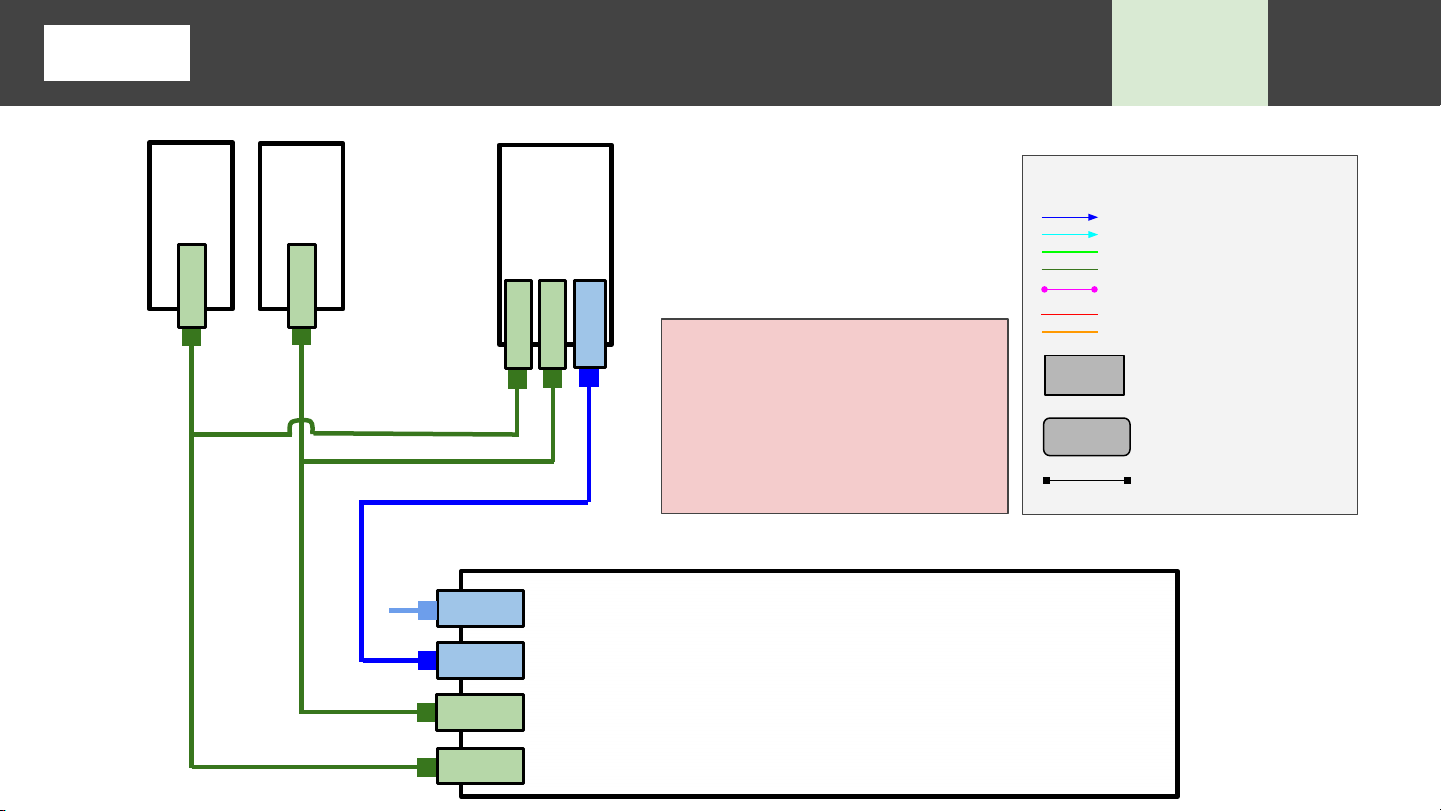
3. The power supply is polarized. Ensure the correct polarity is used before plugging into the unit. There are many built-in protections on
the bulkhead pins, however, incorrect electrical connections may still damage the internal electronics. See your equipment datasheet
for correct wiring. Some equipment has a custom pinout selected at point of sale. Check your documentation before powering.
4. Water should not come in contact with the pins on the bulkheads. When not in use, use dummy plugs. If water touches the pins, use
contact cleaner and compressed air to remove the water.
5. Before attaching the connector to the equipment, be certain that the pins are aligned, clean and lightly lubricated with appropriate
silicone o-ring grease (Ultimate o-ring lubricant for example http://www.ablesealanddesign.com).
6. All fasteners on the equipment are metric. They should be hand tightened during regular maintenance.
7. Do not stare into the beam. Staring directly into the beam or the reflected beam can cause permanent
eye damage. Ensure you are always wearing the supplied laser safety glasses.
8. Please refer to the regulations according to EN 60825-1 and BGV B2. For laser sources classified in
Laser Classes 3 and 4, please refer to the additional regulations according to EN 207/208 (Laser Safety).
*LED flashing may cause seizures in people who are susceptible
**The customer is responsible for ensuring that the device conforms to Laser Safety Standards. SubC recommends laser safety training.
Precautions and Maintenance