EN
Table of Contents
1USER INFORMATION ......................................................................................................................4
1.1 SYMBOLS USED .............................................................................................................................. 4
1.2 SCOPE OF SUPPLY .......................................................................................................................... 4
1.3 IMPORTANT INFORMATION........................................................................................................... 4
1.4 INTENDED USE ............................................................................................................................... 4
2INTERFACE SETTINGS .....................................................................................................................5
3UART ZDC COMMANDS..................................................................................................................5
4GENERAL INFORMATION................................................................................................................5
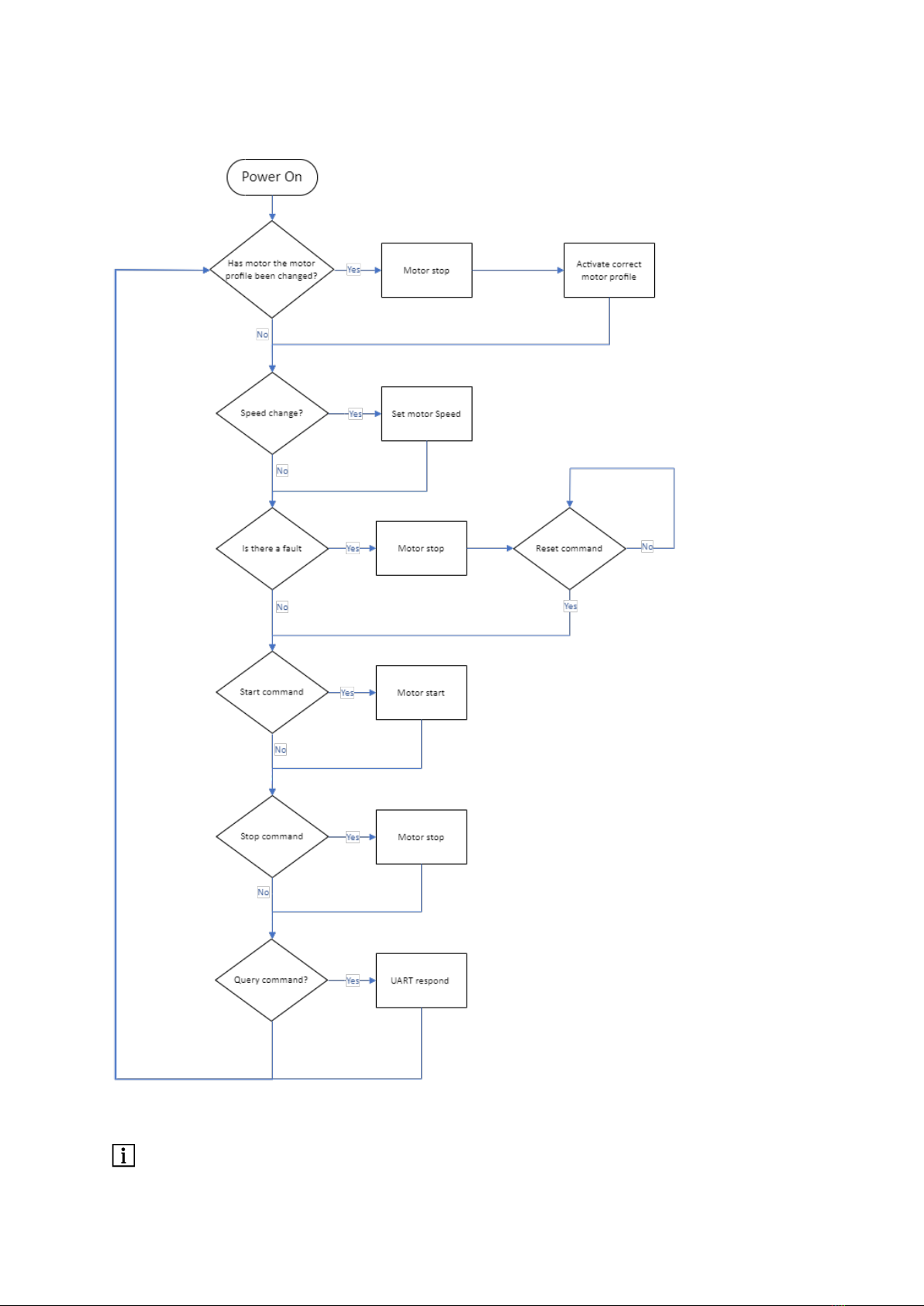
5STATE MACHINE.............................................................................................................................6
6QUERY FIRMWARE/HARDWARE VERSION .....................................................................................7
7QUERY HARDWARE IDENTIFIER......................................................................................................8
8START MOTOR ...............................................................................................................................8
9STOP MOTOR .................................................................................................................................9
10 SET SPEED ......................................................................................................................................9
11 CHANGE MOTOR PROFILE ............................................................................................................10
12 RESET INVERTER...........................................................................................................................10
13 QUERY SPEED...............................................................................................................................11
14 QUERY STATUS.............................................................................................................................12
15 QUERY INTERNAL STATUS............................................................................................................13
16 QUERY POWER.............................................................................................................................14
17 QUERY BUS VOLTAGE...................................................................................................................15
18 QUERY CURRENT..........................................................................................................................16
19 QUERY MOTOR TEMPERATURE....................................................................................................17
20 QUERY INVERTER TEMPERATURE.................................................................................................18
21 QUERY NAME...............................................................................................................................19
WARRANTY CONDITIONS.....................................................................................................................20