- 5 - 6/07 A1
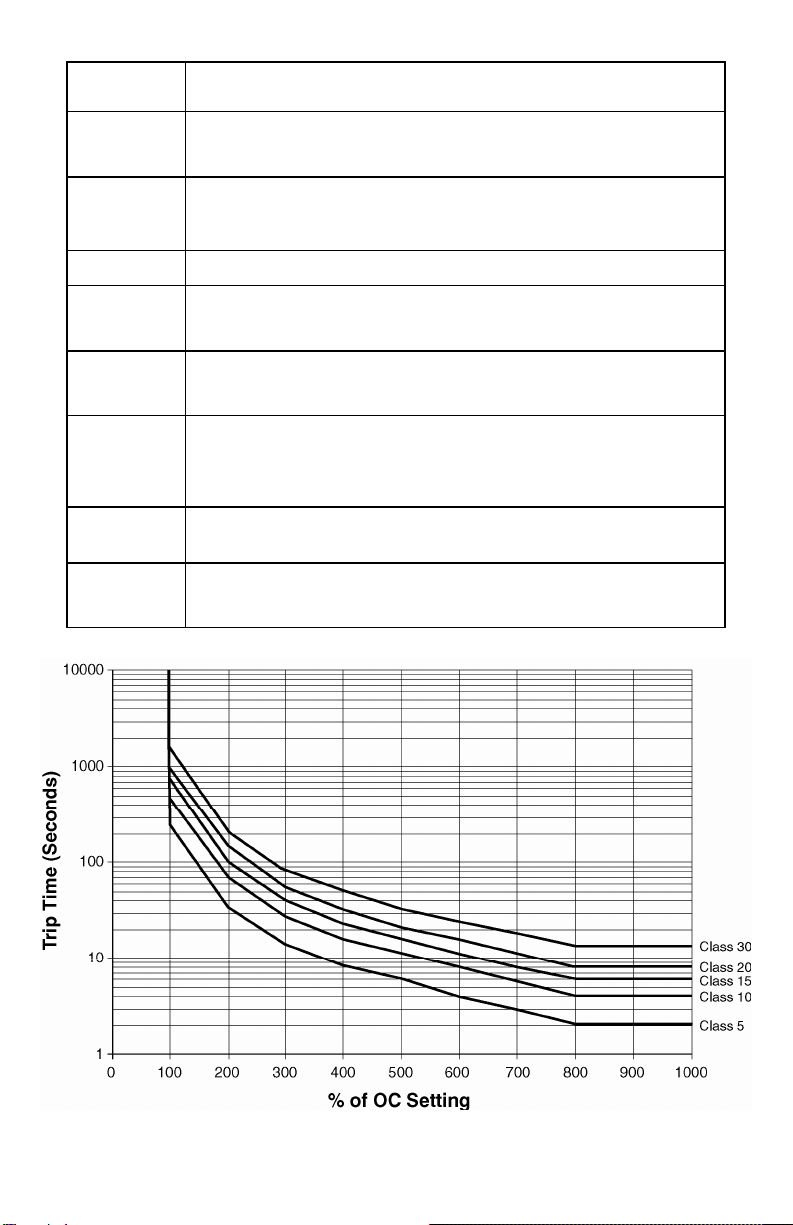
P will trip on overcurrent. While the standard trip classes are 5, 10, 15, 20, and 30, TC can
be set from 2–30, with or without jam protection. These additional “non-standard” trip
classes allow the unit to follow a trip curve in-between the “standard” trip class curves
shown in Figure 4.
Trip classes 2–30 can be set from approximately the 7 o’clock to 11 o’clock position on the
DISPLAY/PROGRAM dial. Trip classes J02–J30, which include jam protection, can be set
from the 11 o’clock to 2 o’clock position (this additional jam protection feature, when
enabled is initiated 1 minute after the motor starts and provides a 2-second trip delay for
motors exceeding 400% of the OC setting).
The linear overcurrent trip delay can be set after the 2 o’clock position from 0–60 seconds
(L00–L60) or to “oFF.” If TC is set to L00, the 777-P will trip off within 1 second when an
overcurrent condition is detected.
If both trip class and linear trip delay settings are programmed, the 777-P will follow the
faster trip time. E.g., let’s say TC is set to J15 and L20, and the amperage is 200% of the
OC setting. Following the trip class 15 curve, the 777-P will trip off in approximately 100
seconds. Thus the 777-P will follow the linear trip delay setting, because it is faster, and will
trip off in 20 seconds.
The motor manufacturer should be contacted for an exact TC setting. Table 3 describes the
trip classes, and Figure 4 shows the trip class curves.
RD1 - RD1 (restart delay one) is the rapid-cycle timer in seconds. This timer is initiated when
power is first applied to the unit. If voltages are within the programmed limits and no SP
(single-phase) or RP (reverse-phase) condition exists when power is applied to the device,
the output relay will energize (the NO will close and the NC will open) as soon as RD1
expires. Typically, this is set to 20-30 seconds. This will provide adequate protection for
successive power outages or short cycling caused by other motor controls. This timer is
also initiated when another control shuts the motor off (current goes to zero). If the user
does not want the unit’s relay to de-energize when another control shuts the motor off, then
RD1 should be set to zero. This will also ensure that when an alarm circuit is used, an alarm
will sound only when there is a fault or power is lost.
RD2 - RD2 (restart delay two) is the restart timer, in minutes (standard), used when the unit has
shut off due to a current unbalance, current single phasing, or an overload condition. This
timer is known as a motor cool-down timer. A setting of 5-10 minutes will give most motors
adequate time to cool down after an overload condition. The motor manufacturer should be
contacted for an exact value.
RD3- (restart delay three) is the restart timer, in minutes (standard), used after an undercurrent
trip. It is also known as a dry-well recovery timer in pumping applications. This would be the
time it takes a well to recharge after pumping dry. This setting varies widely from application
to application and there is no typical setting. RD3 can be set from 2-500 minutes or to A to
enable the automatic Dry-Well Recovery Calculator.
The Automatic Dry-Well Recovery Calculator allows the 777-P to automatically select a
restart delay based on the run time of the last run cycle. Table 2 shows the next restart
delay vs. run time. In general, a longer run time produces a shorter restart delay. This
feature allows the 777-P to optimize running and rest times automatically.