Table of Contents
1. Related Manuals ........................................................................................ 1
2. Terms and Definitions ............................................................................... 2
3. Remarks ..................................................................................................... 3
4. Overview .................................................................................................... 5
5. Applicable Devices and Support Software.............................................. 6
5.1. Applicable Devices............................................................................. 6
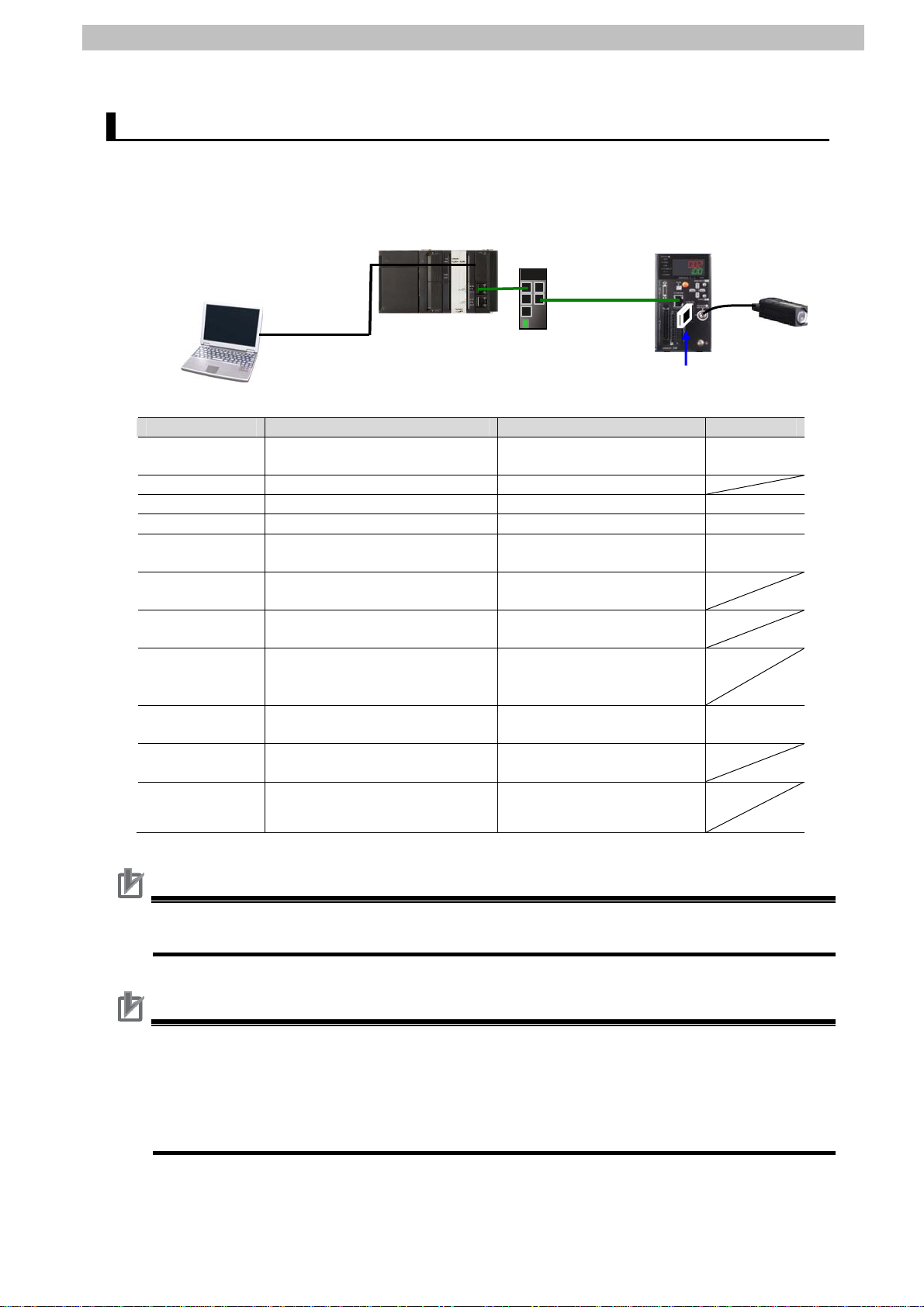
5.2. Device Configuration.......................................................................... 7
6. Ethernet Communications Settings......................................................... 9
6.1. Ethernet Communications Settings.................................................... 9
6.2. Example of Checking Connection .................................................... 10
7. Connection Procedure .............................................................................11
7.1. Work Flow .........................................................................................11
7.2. Setting Up the Displacement Sensor ............................................... 12
7.3. Setting Up the Controller.................................................................. 19
7.4. Checking the Ethernet Communications .......................................... 27
8. Initialization Method................................................................................ 30
8.1. Initializing the Controller................................................................... 30
8.2. Initializing the Displacement Sensor ................................................ 30
9. Program.................................................................................................... 31
9.1. Overview .......................................................................................... 31
9.2. Destination Device Command.......................................................... 35
9.3. Error Detection Processing .............................................................. 39
9.4. Variables .......................................................................................... 42
9.5. ST Program...................................................................................... 47
9.6. Timing Charts................................................................................... 64
9.7. Error Process ................................................................................... 70
10. Revision History .................................................................................. 74