Telma TRCM2 TL133013 User manual

21mar19jh
e.com
so
TL133013
TELMA TRCM2
DYNOMOMETER
USER GUIDE

TL133013 TRCM2 iRCS Dyno User Guide
Page 2 of 6________________________________________________________________________21mar19jh
1.1 TRCM2 PWM control for Dynamometer or other industrial applications
The Telma Retarder Control Module (TRCM2) is the control module used for Telma systems. It can be used in a
dynamometer or other industrial application along with our iRCS power module using a simple variable voltage input
to proportionally control power to the Telma using pulse width modulation.
1.2 Kits
iRCS CONTROL KIT INDUSTRIAL 12V TIK14300
DESCRIPTION TELMA P/N QTY
iRCS 12V JE1002122 1
TRCM2 TIG31069 1
TRCM DTM PLUG
(
GRY
)
TIG31070 1
TRCM DTM PLUG
(
BLK
)
TIG31071 1
TRCM DTM 12WAY WEDGLOCK TIG31072 2
TRCM DTM TERMINALS TIG31067 10
iRCS CONTROL KIT INDUSTRIAL 24V TIK24300
DESCRIPTION TELMA P/N QTY
iRCS 24V JE1002344 1
TRCM2 TIG31069 1
TRCM DTM PLUG
(
GRY
)
TIG31070 1
TRCM DTM PLUG
(
BLK
)
TIG31071 1
TRCM DTM 12WAY WEDGLOCK TIG31072 2
TRCM DTM TERMINALS TIG31067 10

TL133013 TRCM2 iRCS Dyno User Guide
Page 3 of 6________________________________________________________________________21mar19jh
1.3 iRCS
Parts included with iRCS

TL133013 TRCM2 iRCS Dyno User Guide
Page 4 of 6________________________________________________________________________21mar19jh
1.4 Wiring Diagram
TL133013 TRCM2 iRCS Dyno User Guide
Page 5 of 6________________________________________________________________________21mar19jh
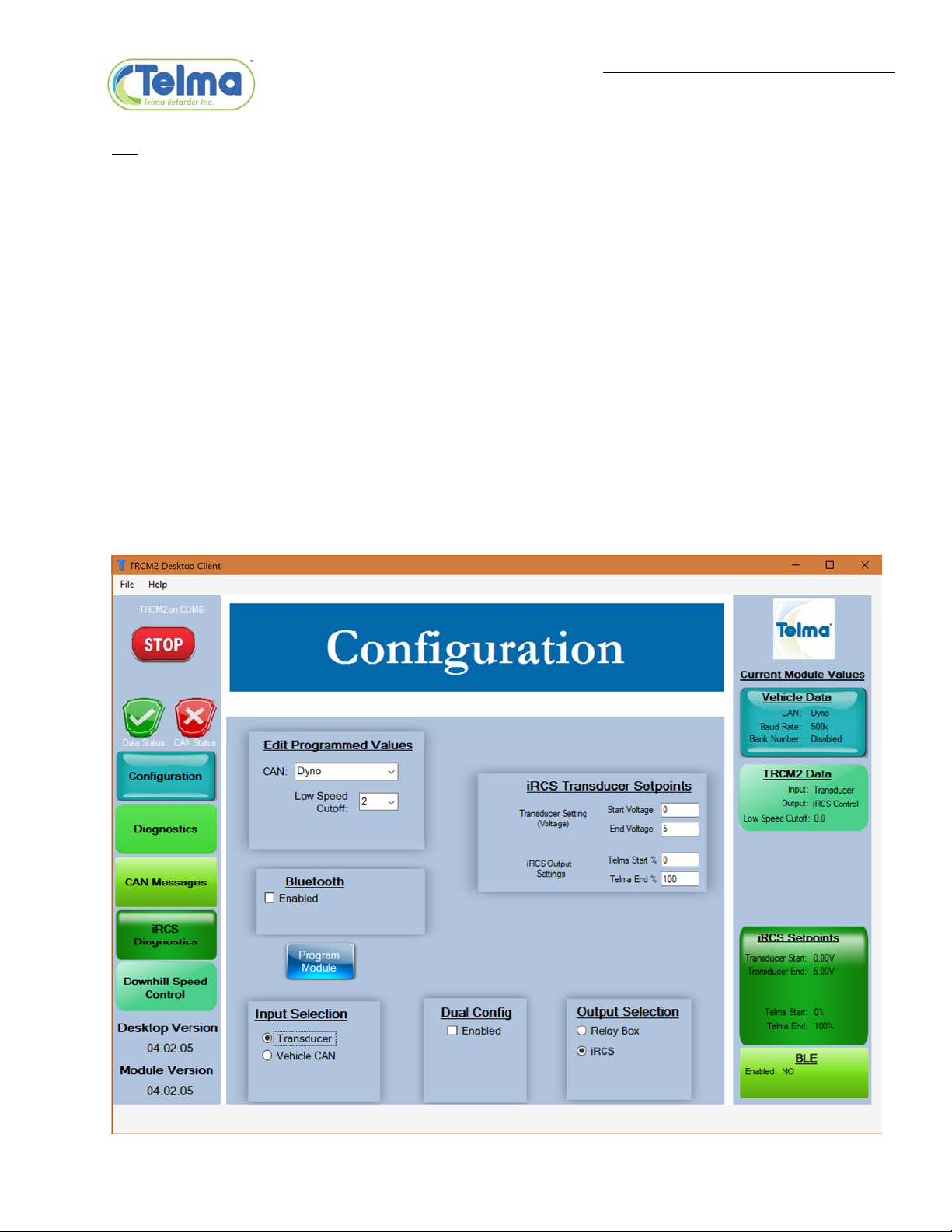
1.5 TRCM2 Configuration
Download TRCM2 software to your computer from https://telmausa.com/Downloads/TRCM2.exe.
Do not turn on switched power at this time.
Plug the usb cable into the computer
Open the TRCM2 Telma software.
Plug the usb cable into the TRCM2 usb-c board connector through the hole in the TRCM2 housing. In the
configuration section of the TRCM2 software just above the green start button you should see “TRCM2
connected to COM”.
Left click on the green start button. Data Status should change to a green check mark.
Under “Edit Programmed Values” choose the CAN drop down “Dyno“ and the “Low Speed Cutoff” drop
down 0mph.
Under “Input Selection” choose “Transducer”.
Under “Output Selection” choose “iRCS”.
Under “iRCS Transducer Setpoints” type the following settings “Transducer Start Voltage”=0, “Transducer
End Voltage”=5, “iRCS Telma Start”=0, and “iRCS Telma End”=100. Do not enable “Bluetooth” or “Dual
Config”.
Left click on the blue “Program Module” button and check on the right side that “Current Module Values”
change to the settings you have chosen.
Left click on the red “Stop” button, close the software, and unplug the usb cable from the TRCM2.
Congratulations, you are finished configuring TRCM2 for iRCS Dyno operation.

TL133013 TRCM2 iRCS Dyno User Guide
Page 6 of 6________________________________________________________________________21mar19jh
1.6 TRCM2 iRCS Dyno Diagnostics
On the “Diagnostics page” under “Analog Inputs” go to “Transducer:” to observe input voltage
to TRCM2.
On the “iRCS Diagnostics” page under “TRCM2 to IRCS” go to “Brake Pedal Position” to
observe % PWM being requested from iRCS.
Table of contents
Popular Measuring Instrument manuals by other brands













Viavi
Viavi OneExpert ONX CATV 620 Extended Quick Start Guide

Valeport
Valeport Hyperion operating manual

Southwire
Southwire SURGE GUARD 67030 Installation & operating instructions

BC Biomedical
BC Biomedical DPM-2001 user manual

FISCHER
FISCHER DS21xxxH series operating manual

Agilent Technologies
Agilent Technologies 8711C Service guide