MTS25-Z8 and MTS50-Z8 DC Motorized Translation Stages
Contents
Chapter 1 Overview ...............................................................................................................1
1.1 Introduction..................................................................................................1
Chapter 2 Safety.....................................................................................................................2
2.1 Safety Information.......................................................................................2
2.2 General Warnings........................................................................................2
Chapter 3 Installation............................................................................................................3
3.1 Environmental Conditions ........................................................................3
3.2 Mounting........................................................................................................4
3.2.1 Invalidation of Warranty..................................................................................4
3.2.2 General.............................................................................................................4
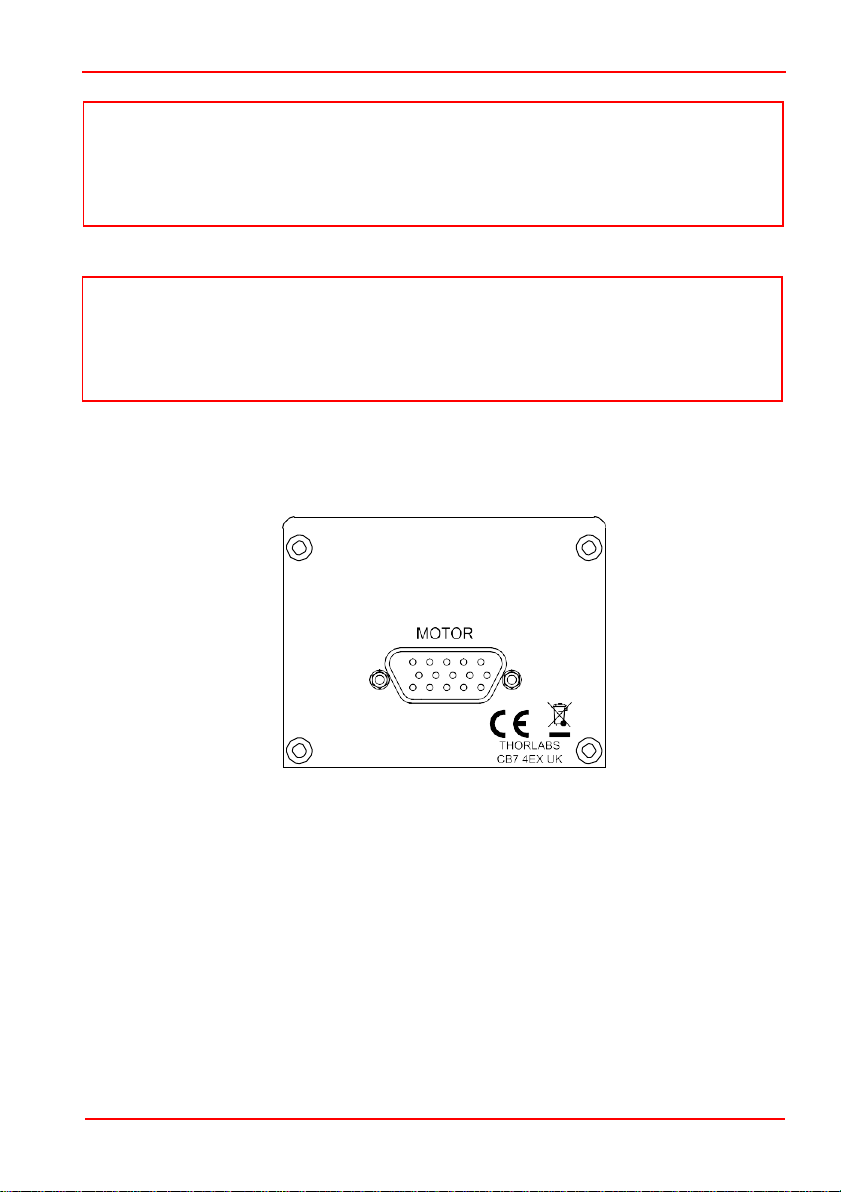
3.2.3 Connecting The Motor Driver.........................................................................5
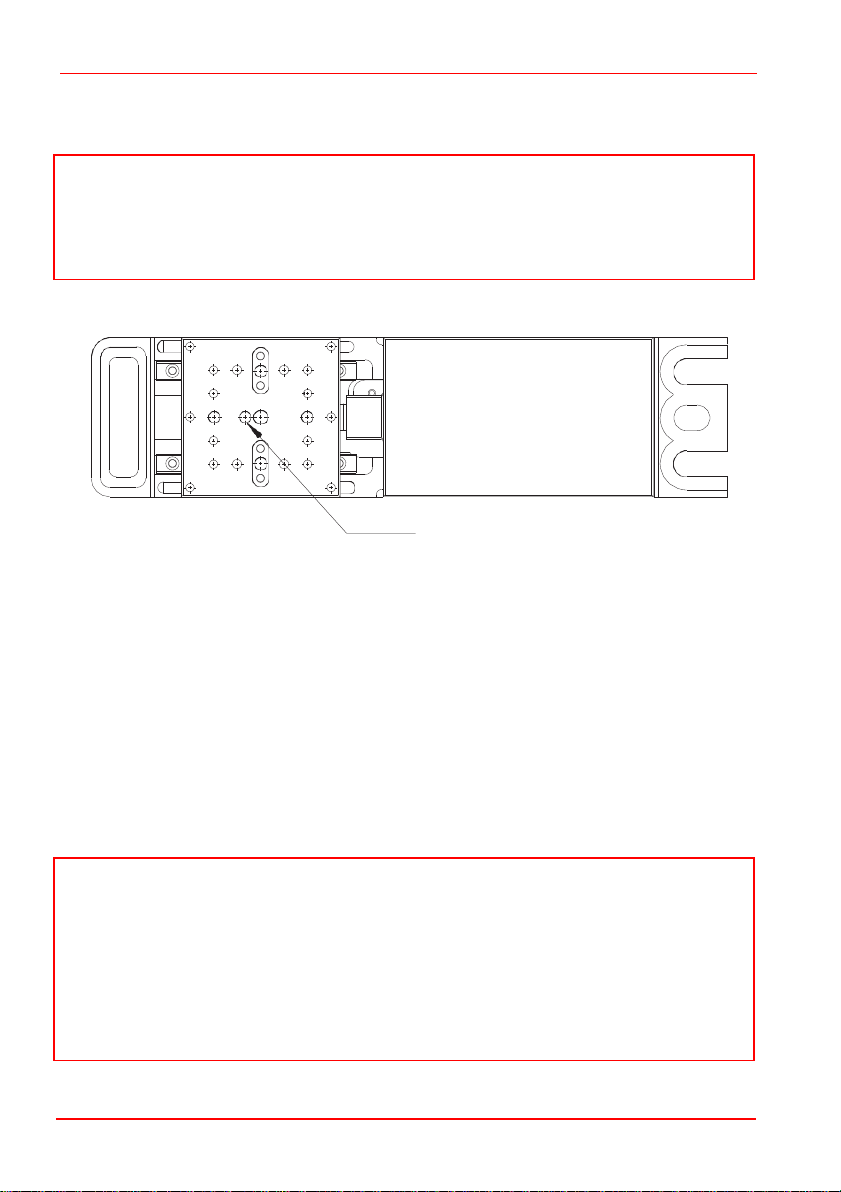
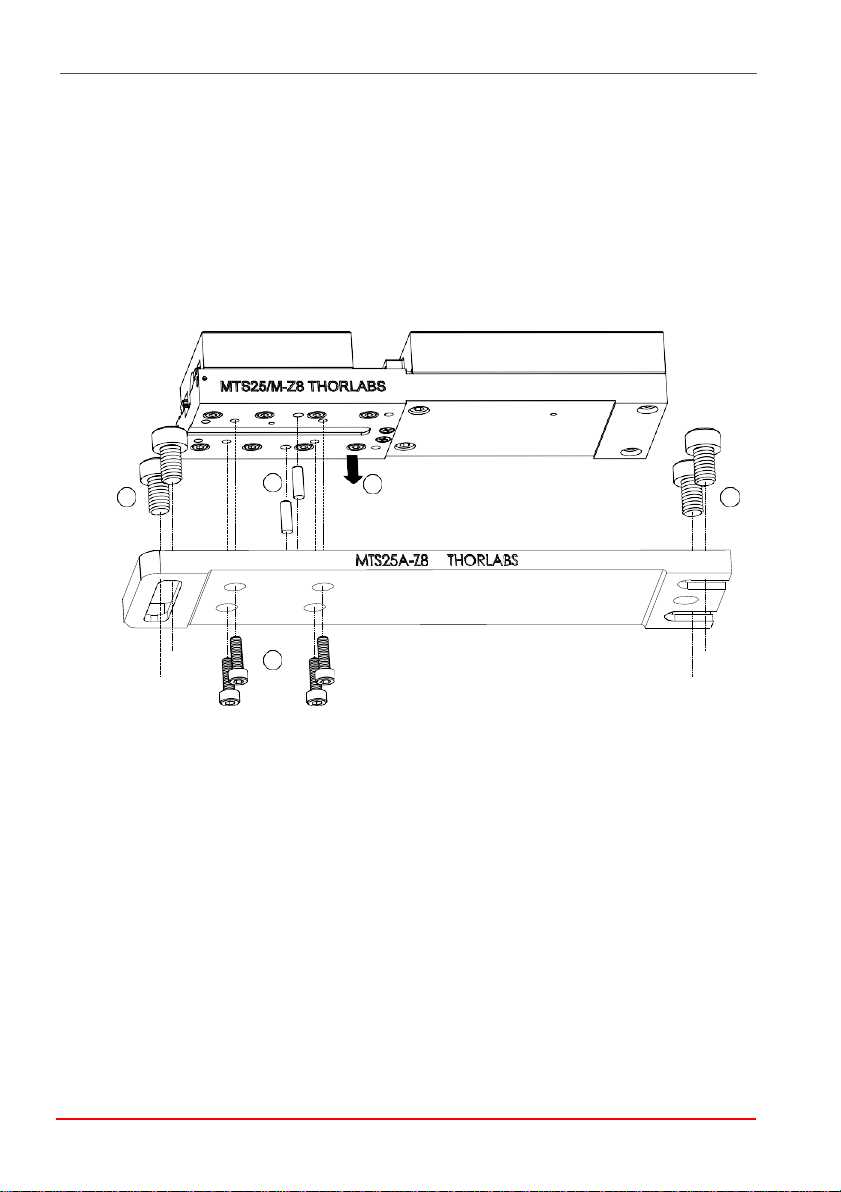
3.2.4 Fitting and Removing the Base Plate............................................................6
3.2.5 Building an XY Configuration.........................................................................7
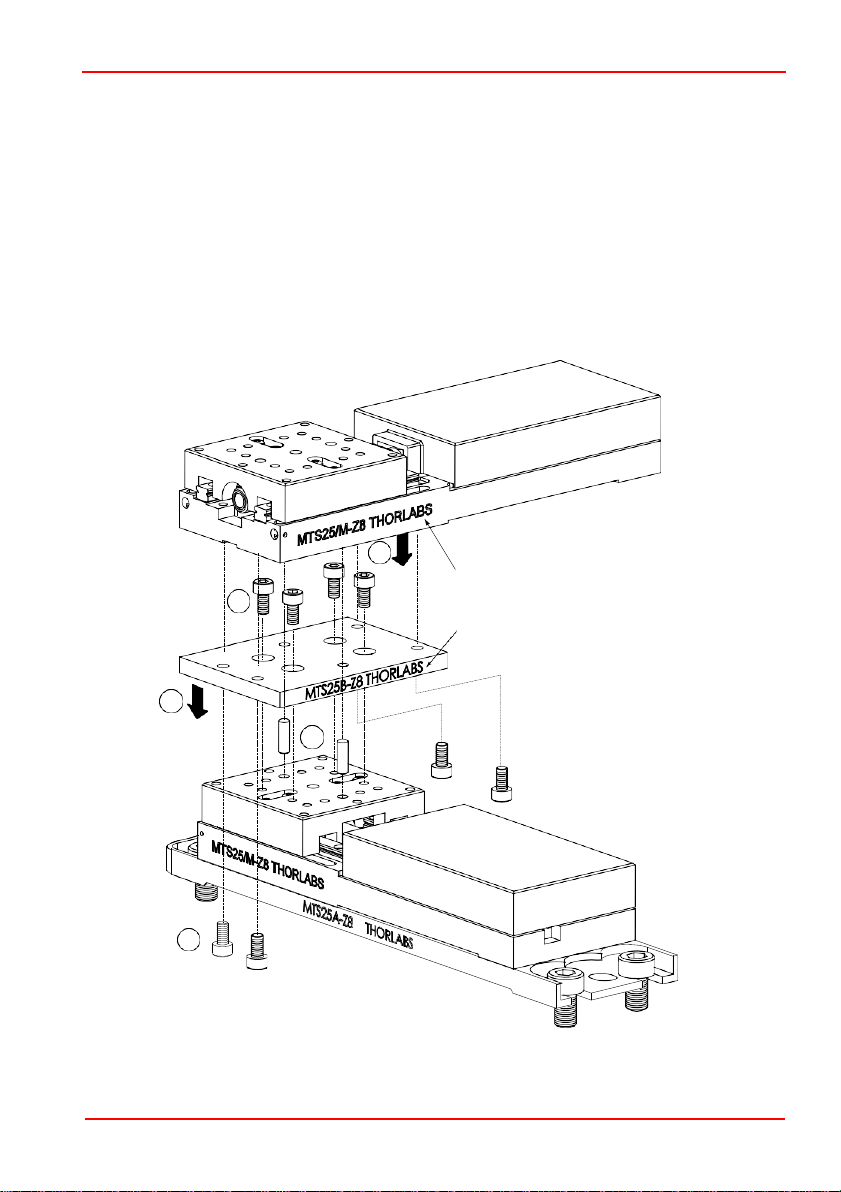
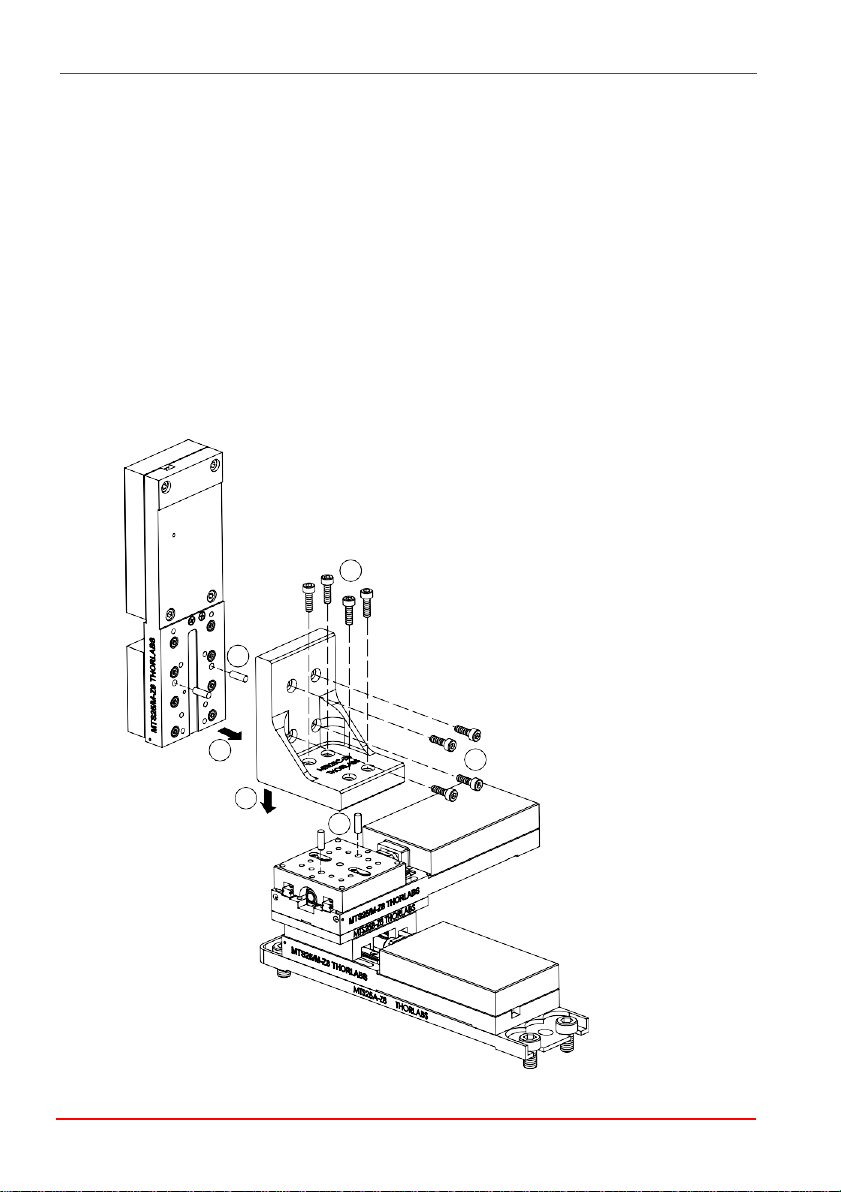
3.2.6 Building an XYZ Configuration.......................................................................8
3.3 Transportation..............................................................................................9
3.4 Dimensions................................................................................................ 10
3.4.1 MTS Dimensions ...........................................................................................10
Chapter 4 Operation........................................................................................................... 11
4.1 General....................................................................................................... 11
Chapter 5 Specifications................................................................................................... 13
5.1 Stage Specifications................................................................................ 13
5.2 Motor Specifications.................................................................................14
Chapter 6 Motor Pin Out Details & Associated Parts................................................. 15
6.1 Motor Connector Pin Out........................................................................ 15
6.2 Associated Products............................................................................... 15
Chapter 7 Regulatory ......................................................................................................... 16
7.1 Declarations Of Conformity....................................................................16
7.1.1 For Customers in Europe .............................................................................16
7.1.2 For Customers In The USA..........................................................................16
7.2 CE Certificates........................................................................................... 17
Chapter 8 Thorlabs Worldwide Contacts ...................................................................... 18
19593-D02