© July 2017 Van Essen Instruments. All rights reserved.
Contents
1 Introduction.............................................................................................................................................1
1.1 Features..........................................................................................................................................1
1.2 System Overview...........................................................................................................................2
2 Getting Started........................................................................................................................................2
2.1 Supported Equipment..................................................................................................................2
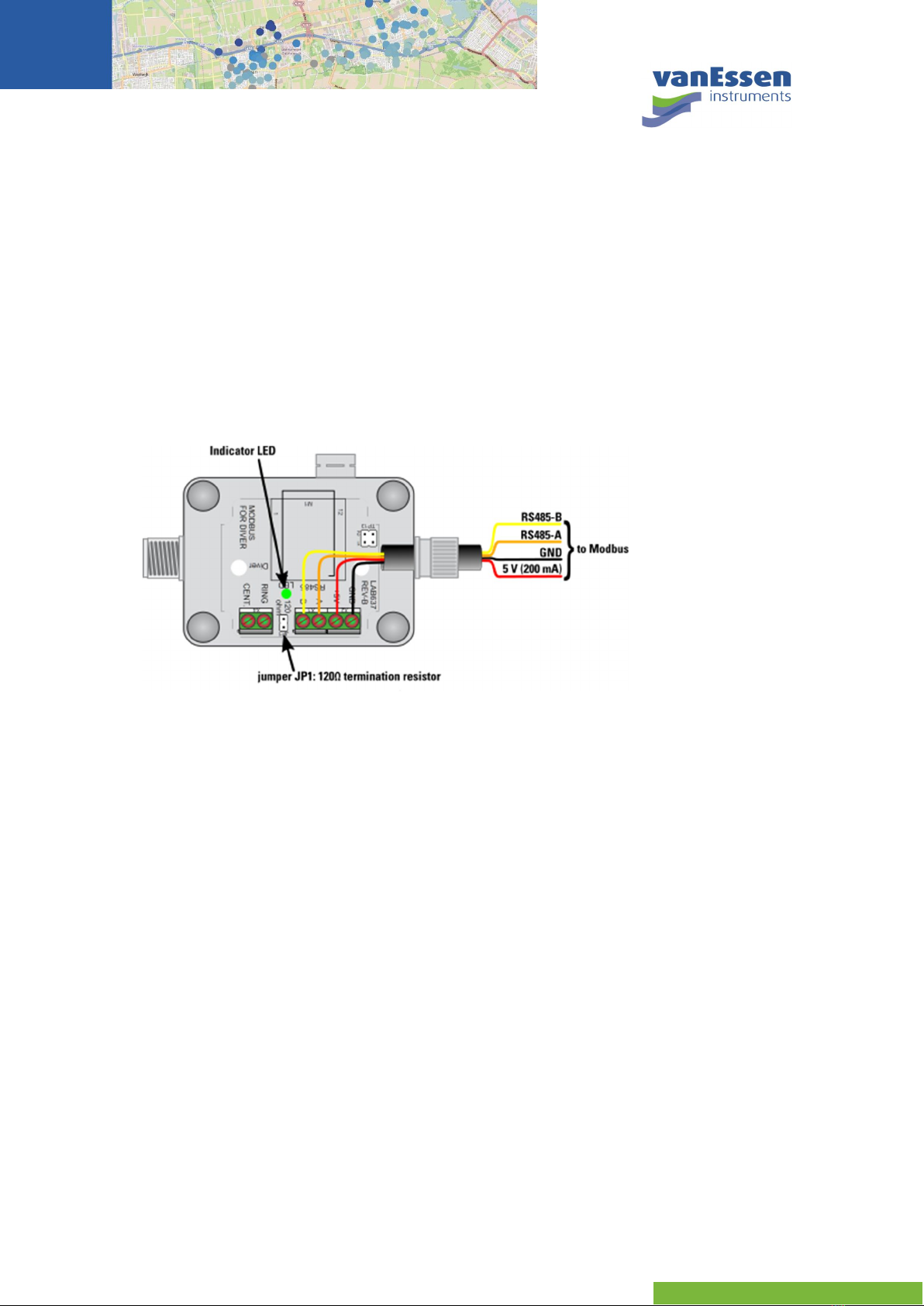
2.2 Installation.....................................................................................................................................3
2.3 Configuration.................................................................................................................................3
2.4 Transmission Mode.......................................................................................................................5
2.5 Operation.......................................................................................................................................5
3 Modbus Registers ....................................................................................................................................5
3.1 Reg. 30002, 30012: Firmware Version and Serial Number Diver-MOD.....................................5
3.2 Reg. 30220: Real-time Barometric Data from Diver-MOD.........................................................6
3.3 Reg. 40001: Change Slave Address of Diver-MOD ......................................................................6
3.4 Reg. 40002: Change Baudrate of the RS485 port .......................................................................6
3.5 Reg. 40003: Change Parity of the RS485 port.............................................................................7
3.6 Reg. 00001: Update Real-Time Data from Diver.........................................................................7
3.7 Reg. 00002: Get Diver Data ...........................................................................................................8
3.8 Reg. 00003: Update General Diver Information .........................................................................8
3.9 Reg. 00004: Force to accept new connected Diver ....................................................................8
3.10 Reg. 00011: Start/Stop Logging of Diver.....................................................................................9
3.11 Reg. 30241: Number of Records Recorded by Diver ..................................................................9
3.12 Reg. 30242: Maximum Number of Records for Diver.................................................................9
3.13 Reg. 30243: Remaining Battery Capacity Diver..........................................................................9
4 Reading Diver Data................................................................................................................................10
4.1 Header Information ....................................................................................................................10
4.2 Time Series Data..........................................................................................................................11
5 Appendix A – Specifications.................................................................................................................15
5.1 Casing...........................................................................................................................................15
5.2 Connections.................................................................................................................................15
5.3 Power Consumption...................................................................................................................15
5.4 Modbus.........................................................................................................................................15
5.5 Pressure........................................................................................................................................16
5.6 Temperature................................................................................................................................16
5.7 Environmental.............................................................................................................................16
6 Appendix B - Diver-MOD Register Map................................................................................................17
6.1 Coils – Status Registers...............................................................................................................17
6.2 Read Only Registers ....................................................................................................................17
6.3 Reading Diver Memory................................................................................................................18
7 Appendix C – Pressure Conversion Table ...........................................................................................22
8 Appendix D – Diver Equipment............................................................................................................23
8.1 Communication Cable................................................................................................................23
8.2 TD-Diver........................................................................................................................................23