Viewpro Z10TIRM User manual

User Manual
Mini Z10TIRM 10x Optical Zoom EO + IR Dual-Sensor
Laser Rangefinder Object Tracking
Gimbal Camera
For more details please scan the QR code
or visit our website:
www.viewprotech.com
Standard Version
标准版 快拆版
Viewport Version
Disclaimer and Warning
Legends:
1.1 Introduction
1.Product Introduction
1
Important NoteWarning
Min Z10TIRM is the lightest LRF Viewpro gimbal camera currently
which with weight 598g. It is a powerful 3-aixs is a powerful 3-axis
gimbal integrated with a 4.08MP 10x optical zoom camera, 24mm
lens 640*512 IR thermal sensor and 1.5km laser rangefinder. It
supports visible optical zoom, IR thermal and visible PIP switch, IR
color palette switch, photographing and video, target tracking,
thermal digital zoom and laser ranging. When the external GPS and
time input, the OSD can display angle, zoom times, target GPS
location, target distance measured, real-time, tracking frame, photo
and video status, also can select to turn off the OSD. It features fast
Congratulations on purchasing your new Viewpro product. Please
read this entire document carefully. Failure to read or follow instruc-
tions and warnings in this document may result in damage to your
Viewpro product. Disassemble the gimbal camera by user is not
permitted, which may cause the camera does not to work normally.
Viewpro accepts no liability for damage, injury or any legal responsi-
bility incurred directly or indirectly from the use of this project. The
user shall observe safe and lawful practices including, but not
limited to, those set forth in the manual.

Mini Z10TIRM is widely used in UAV industries of public security,
electric power, fire fighting, zoom aerial photography and other
industrial applications.
focus and sensitive distance measurement. The high-precision
laser rangefinder can accurately resolve the GPS location and
distance of the object within 1500 meters. The 3 axis gimbal can
achieve stabilization in yaw, roll and pitch. The integrated design of
damping system and gimbal can greatly reduce mechanical
vibration.
1.2 In the Box
A. Standard Version
Gimbal Camera
x 1 pc
USB to TTL Cable
x 1 pc
Power Cable
x 1 pc
M3 Screw
x 8 pcs
Copper Cylinder
x 4 pcs
2
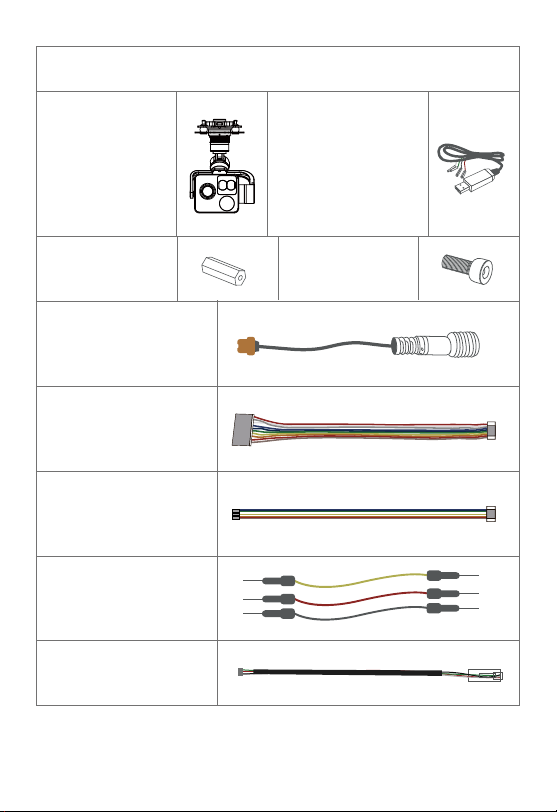
B. Viewport Version
Gimbal Camera
x 1 pc
USB to TTL Cable
x 1 pc
Copper Cylinder
x 4 pcs
Power Cable
x 1 pc
PWM Control Cable
x 1 pc
M3 Screw
x 8 pcs
TTL / S.BUS Control
Cable x 1 pc
TTL Connect Cable
x 3 pcs
Ethernet Cable x 1 pc
3
2. Installation Instruction
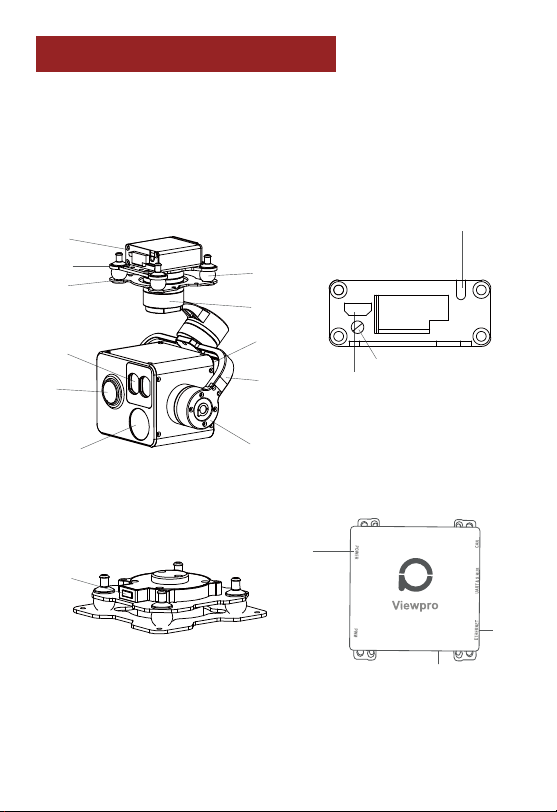
2.1 Overview
Viewport
Control Box Back Side
(Standard Version)
(Viewport Version)
[14]
[14]
[13]
[13]
[12]
[12]
[1]
[7]
[8]
[2]
[3]
[9]
[10]
[11]
[6]
[5]
[4]
[15]
4

[1] Control box
[2] Upper damping board
[3] Lower damping board
[4] laser rangefinder
[5] FHD zoom camera
[6] Infrared thermal camera
[7] Damping ball
[8] Yaw axis motor
[9] TF card slot
[10] Roll axis motor
[11] Pitch axis motor
[12] 3-6S power interface
[13] Micro HDMI interface
[14] Ethernet interface
[15] Viewport unlock button
Please ensure that there isn’t any obstacle while the
motor rotating.
Please remove the obstacle immediately if gimbal
camera is blocked during rotation.
2.2.1 Control Box Printing (Standard Version)
PITCH
Yellow Jumper Cap
TX
RX
GND
YAW
MODE
ZOOM
FOCUS
PIC/REC
MULTI
USB
AV
5V output
GND
123
5
The input voltage cannot be higher than 6S.
The pin insertion interface cannot be connected with
power supply.
The yellow jumper cap cannot be removed.
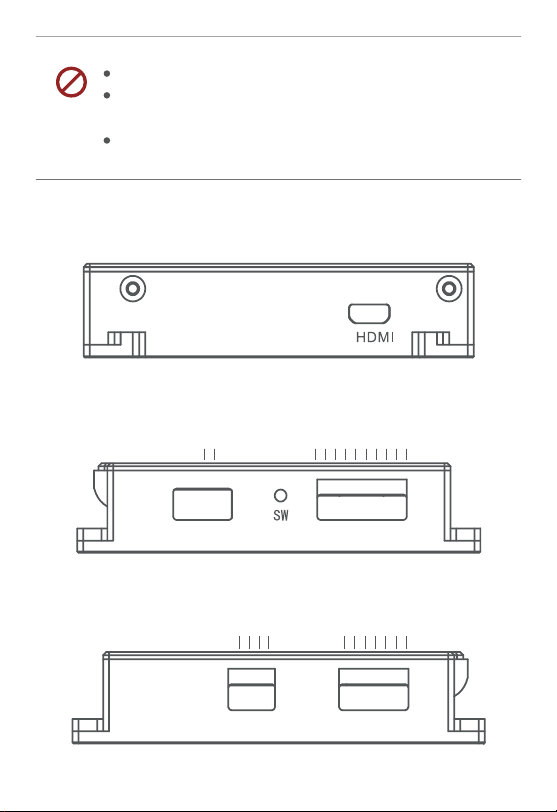
2.2.2 Control Box Printing (Viewport Version)
Front Side
Left Side
Right Side
PITCH
YAW
MODE
ZOOM
FOCUS/PPM
PIC/REC
MULTI
5V
GND
CVBS
3S-6S
GND
POWER PWM
GND
5V
S.BUS
TTX
GND
RXD
TXD
RX-
RX+
TX-
TX+
ETHERNET UART & S.BUS
6

Unit: mm
2.3.1 Device Dimensions (Standard Version)
31.5
16 8.1
82
119. 4
115
72
65
105.7
24.5
4* 3.1
∅
60
7

Unit: mm
2.3.2 Device Dimensions (Viewport Version)
43.2
34.3
46.2
48.4
56.2
51.2
PWM POWER
ETHERNET
UART
8
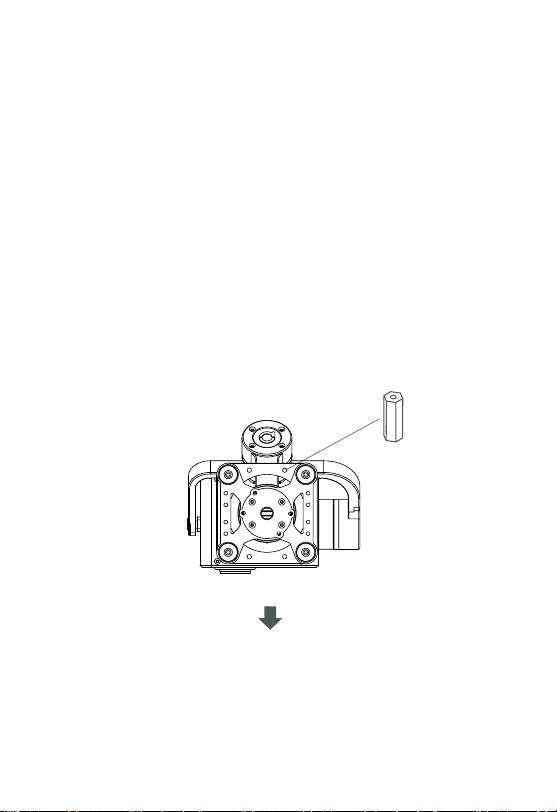
2.4 Install Mounting Part
(1) Find out the arrow on the gimbal which indicating the yaw
heading of the payload (i.e. the lens direction when the camera
power on), and synchronize with the direction specified by the UAV.
(2) Fix one end of the copper cylinder on the screw hole of lower
damping board, and use M3 screw to fasten it.
(3) According to the provided screw hole dimension you can make
suitable mounting holes on the UAV mounting board, and fixes the
other end of the copper cylinder on the mounting board of the UAV
(Viewport version is the same).
Front
9

2.5 Viewport Release Instruction
1. Make sure the two white stripes indicated in above picture are
aligned with each other. (If the stripes are not aligned to each other,
please pinch the connector part and turn it to left manually)
×
10
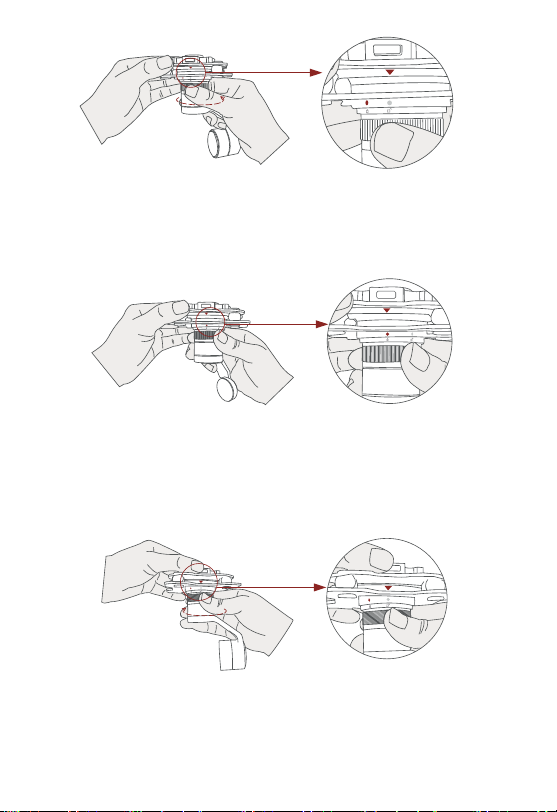
2. Align the white dot (unlock icon) to the red triangle (below unlock
button), push the gimbal into the Viewport completely and then
rotate the gimbal camera anticlockwise.
3. When you hear "click" sound (when red dot is aligned to the red
triangle) means the gimbal camera and Viewport has been locked.
4. To unlock the Viewport, you need to press on unlock button and
rotate the gimbal camera clockwise till the white dot align to the red
triangle. Then pull the gimbal out from the Viewport.
11

2.6 Install TF Card
2.7 Image Output Interface
TF (Micro SD card): Install the TF card to the card slot (Re. 2.1
Overview). Support max 128GB. Request Class 10 (10m/s)
transmission speed or higher and FAT32 or exFAT format.
HDMI: Micro HDMI output, HD 1080P 60/50/30/25fps, 1080P 60fps
as default. (Optional)
SDI: SMA outer screw inner hole interface, 1080P 30fps output.
(Optional)
AV: no AV output
Network: Ethernet output interface, support RTSP/RTMP/UDP/ON-
VIF video streaming. Default: RTSP output, IP address: RTSP:
//192.168.2.119:554, output resolution: 720P (record in 1080p),
frame rate: 25fps, bit rate: 2M. (Optional)
Make sure device is power off when inserting the TF
card, hot plugging is not supported.
Above output mode is optional, HDMI and SDI output
cannot coexist at the same time. Please subject to your
actual product.
When using user interface software Viewlink for network
connection, the network of external device (computer)
should be the IP address: 192.168.2.2 (choose the last
byte among 2~254, can not be 119 same as the gimbal),
subnet mask: 255.255.255.0, Default gateway:
12
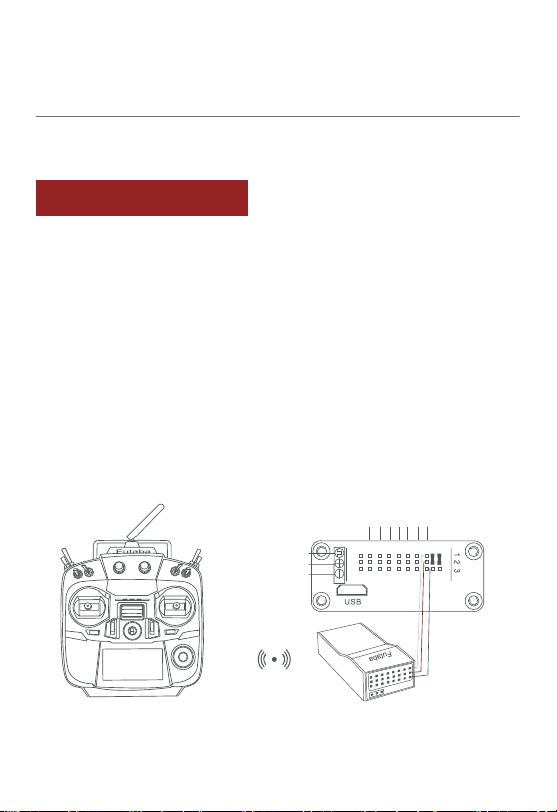
Connection Diagram(Standard Version)
MULTI
PIC/REC
FOCUS
ZOOM
MODE
YAW
PITCH
PWM IN
GND
5V OUTPUT
Remote Controller Receiver
3.1 PWM Control
Control the gimbal camera functions by the multiplex pulse width
modulation signal outputted by PWM channel of the remote control
receiver. The camera needs up to 6 control channels of PWM (to
expand tracking function use up to 7 PWM channels). You can
choose needed functions according to actual usage to reduce the
required number of PWM channels.
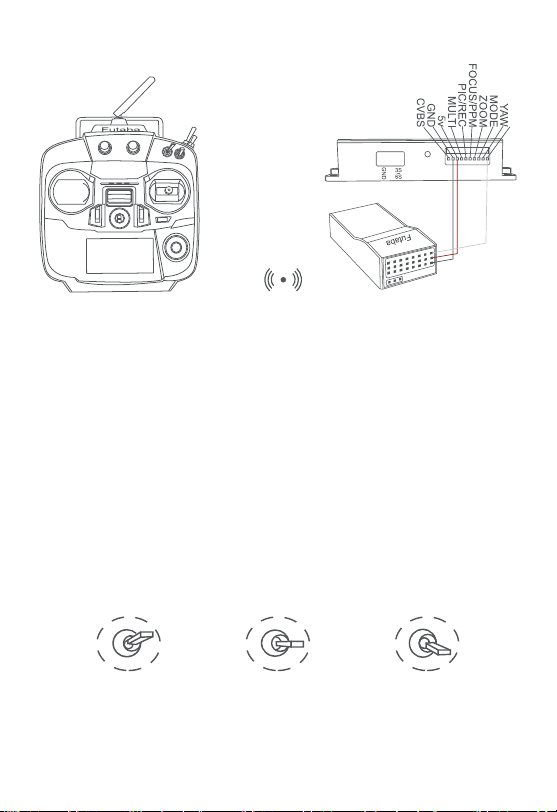
3.1.1 PWM Connection Diagram (Connect pitch chan-
nel as example)
3. Signal Control
192.168.2.1, and all firewalls of the computer must be
closed. Then enter the IP address of the gimbal camera,
Open Video, the video stream can be outputted.
13
Remote Controller
Connection Diagram (Viewport Version)
Receiver
3.1.2 PWM Control Operation Instruction
1) Pitch (PWM Pitch channel in to control Pitch. Joystick, rotary
knob or 3-gear switch on remote control are optional. 3-gear switch
as example.)
Low Gear
Pitch Up
Position 1
Middle Gear
Pitch Stop
Position 2
High Gear
Pitch Down
Position 3
14

2) Yaw (PWM Yaw channel in to control Yaw. Joystick, rotary knob
or 3-gear switch on remote control are optional. 3-gear switch as
example.)
3) Mode (PWM Mode channel in to adjust speed control/one key to
Home position etc functions. Rotary knob or 3-gear switch on
remote control are optional. 3-gear switch as example.)
Low Gear
Yaw Left
Position 1
Middle Gear
Yaw Stop
Position 2
High Gear
Yaw Right
Position 3
Position 1: Low speed mode, control pitch / yaw with this mode at
lowest speed
Position 2: Middle speed mode, control pitch / yaw with this mode at
middle speed
Position 3: High speed mode, control pitch / yaw with this mode at
highest speed
(If it is controlled by rotary knob, the speed will change according to
switch position)
Low Gear
Position 1
Middle Gear
Position 2
High Gear
Position 3
15

4) Function of continuous switching:
3.1) Operate 1 time continuously and quickly, from position 2 - 3 - 2,
to Home position.
3.2) Operate 2 times continuously and quickly, from position 2 - 3 -
2 - 3 - 2, the camera lens looks vertically down.
3.3) Operate 3 times continuously and quickly, from position 2 - 3 -
2 - 3 - 2 - 3 - 2, to disable Follow Yaw Mode (gimbal yaw not follows
by frame)
3.4) Operate 4 times continuously and quickly, from position 2 - 3 -
2 - 3 - 2 - 3 - 2 - 3 - 2, to enable Follow Yaw Mode (gimbal yaw follows
by frame)
5) Zoom (PWM Zoom channel in to control Zoom. Joystick, rotary
knob or 3-gear switch on remote control are optional. 3-gear switch
as example.)
Low Gear
Zoom Out
Position 1
Middle Gear
Stop Zoom
Position 2
High Gear
Zoom In
Position 3
16
6) Focus (PWM Focus channel is to control PIP / IR color palette
switch. 3-gear switch as example.)
7) Pic/Rec (PWM Pic/Rec channel in to control take picture and
record. Joystick, rotary knob or 3-gear switch on remote control are
optional. 3-gear switch as example.)
Switch from Position 2 to 1: Picture in Picture. EO+IR , IR+EO, EO
only, IR only.
Switch from Position 2 to 3: IR color switching: white hot, black hot,
pseudo color.
Low Gear
PIP switch
Position 1
Middle Gear
No control
Position 2
High Gear
IR color palette switch
Position 3
Low Gear
Position 1
Middle Gear
Position 2
High Gear
Position 3
Switch from Position 2 to 1: Take a picture
OSD display 'REC IMG' a second.
17

Switch from Position 2 to 3: Start record / repeat operation to stop
record
Start record, the OSD display rec hh:mm:ss.
Stop record, the OSD display STBY.
8) Multi: IR digital zoom / tracking control
Low Gear
Position 1
Middle Gear
Position 2
High Gear
Position 3
Switch from Position 2 to 1: IR digital zoom, 1x~4x
Switch from Position 2 to 3:
Exit the tracking, display the cross cursor. Adjust the cross cursor
to lock target object and start tracking
Switch from Position 3 to 2:
Cancel tracking
18

3.2 Serial Port / TTL Control
Gimbal Camera Cable
PC
PC
RX
GND
TX
GND
S.BUS
TTX
RXD
GND
TXD
RX-
RX+
TX+
TX-
GND
GANL
CANH
DC5V
RX (White)
TX
GND
RX TX (Green)
GND (Black)
TTL communication requirements: TTL signal is 3.3V, baud rate:
115200, data bit 8, stop bit 1, no parity, HEX send and receive.
Control Box
Viewport Control Box
USB to TTL Cable
USB to TTL Cable
Connection Diagram Standard Version
Connection Diagram Viewport Version
Connection Diagram (PC - USB to TTL Cable- Gimbal Camera as
example):
19
Other manuals for Z10TIRM
2
Table of contents
Other Viewpro Measuring Instrument manuals



















