TM1 manual
Contents
Introduction.........................................................................................................................................................4
Recommended Steps....................................................................................................................................................................... 4
Operation..............................................................................................................................................................5
Parameters Acquisition.................................................................................................................................................................... 5
Temperatures (T1 thru T3)........................................................................................................................................................ 5
Pressures (P1 thru P3)................................................................................................................................................................. 5
Speeds (N1 and N2).................................................................................................................................................................... 5
Fuel Flow and Count (FF1 and FC1)....................................................................................................................................... 6
Voltage and Amps (V1 and A1)............................................................................................................................................... 6
Discrete Inputs (D1 thru D5).................................................................................................................................................... 6
Parameters Communication.......................................................................................................................................................... 7
CAN Bus Interface Basics........................................................................................................................................................... 7
Information Message #1............................................................................................................................................................ 7
Information Message #2............................................................................................................................................................ 7
Information Message #3............................................................................................................................................................ 8
Human-Machine Interfaces............................................................................................................................................................ 8
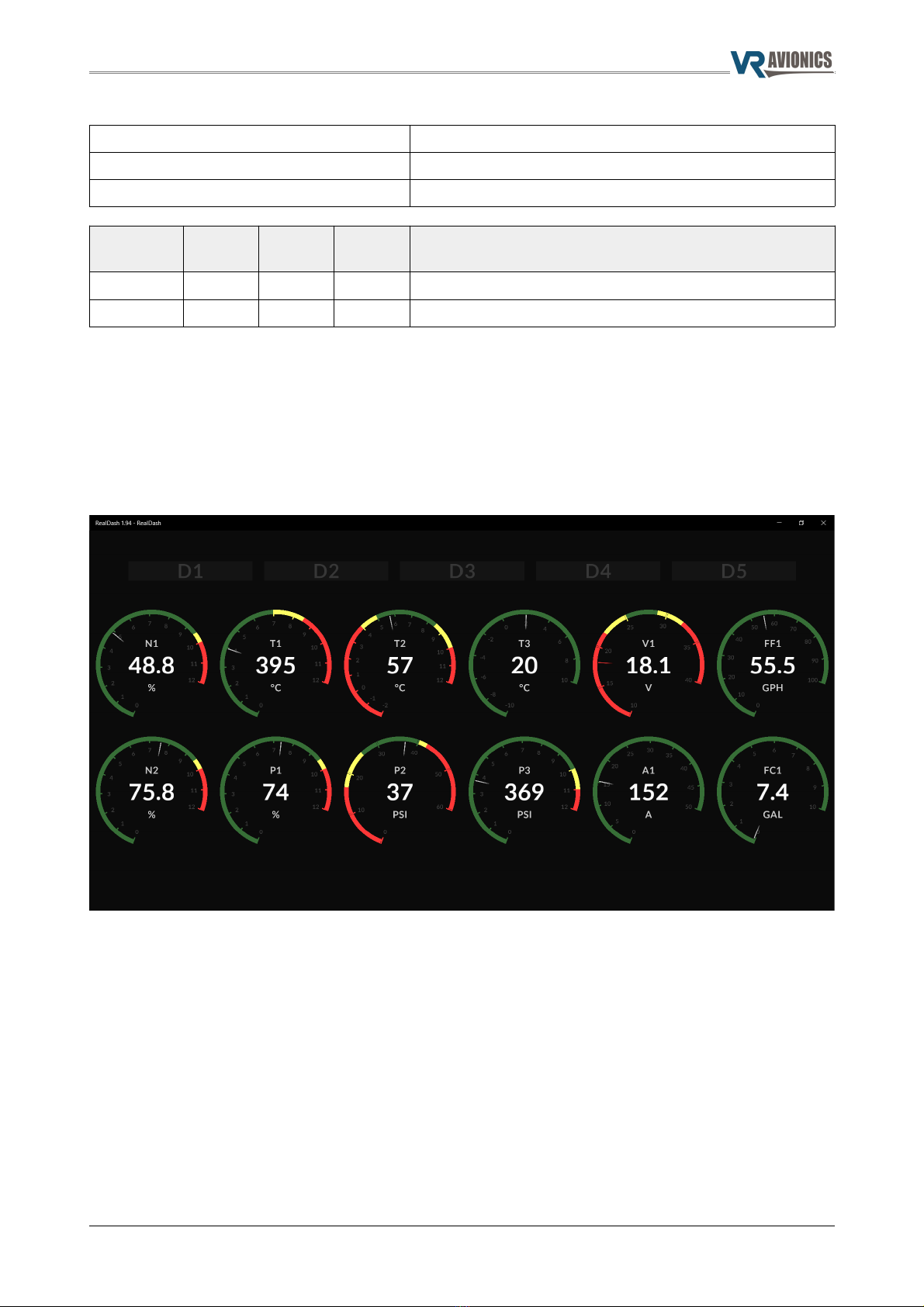
Dashboard Devices...................................................................................................................................................................... 8
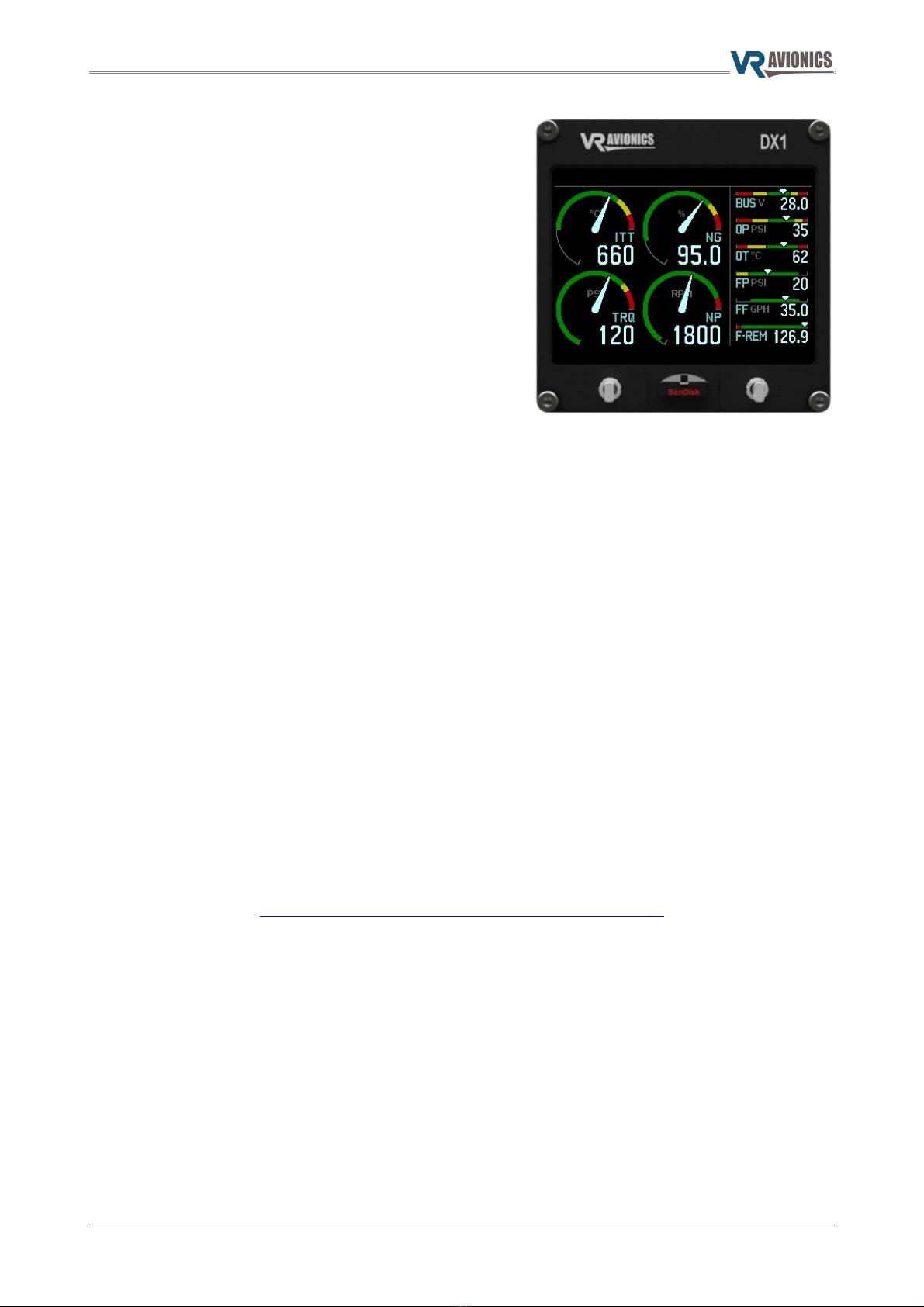
DX1 Displa s.................................................................................................................................................................................. 9
Maintenance Support....................................................................................................................................................................... 9
The SetView App.......................................................................................................................................................................... 9
Installation..........................................................................................................................................................10
Mounting and Wiring.................................................................................................................................................................... 10
Basic Power & Communication.................................................................................................................................................. 10
Temperature Sensing..................................................................................................................................................................... 11
Pressure Sensing.............................................................................................................................................................................. 11
Speed Sensing.................................................................................................................................................................................. 12
Fuel Flow Sensing............................................................................................................................................................................ 12
Voltage and Amps Sensing.......................................................................................................................................................... 12
Discrete Input Sensing................................................................................................................................................................... 13
Sensors / Transducers / Senders / Probes............................................................................................................................. 13
Configuration.....................................................................................................................................................14
Operational Settings...................................................................................................................................................................... 14
CAN Bus Base ID........................................................................................................................................................................ 14
CAN Bus Interface Speed........................................................................................................................................................ 14
N1 & N2 Speed Sensor Full-Scale Frequenc (Hz)........................................................................................................ 15
N1 & N2 Speed Sensor Full-Scale Value........................................................................................................................... 15
FF Fuel Flow Sensor K-Factor................................................................................................................................................. 15
FF Fuel Flow Sensor Full-Scale Value.................................................................................................................................. 15
A1 Current Sensor/Shunt Full-Scale Value....................................................................................................................... 15
A1 Current Zero Deadband Value....................................................................................................................................... 15
P1, P2 & P3 Pressure Sensor Full-Scale Value................................................................................................................. 16
Factor Calibration Settings........................................................................................................................................................ 16
2023-09-21 © 2023 VR Avionics page 3 of 16