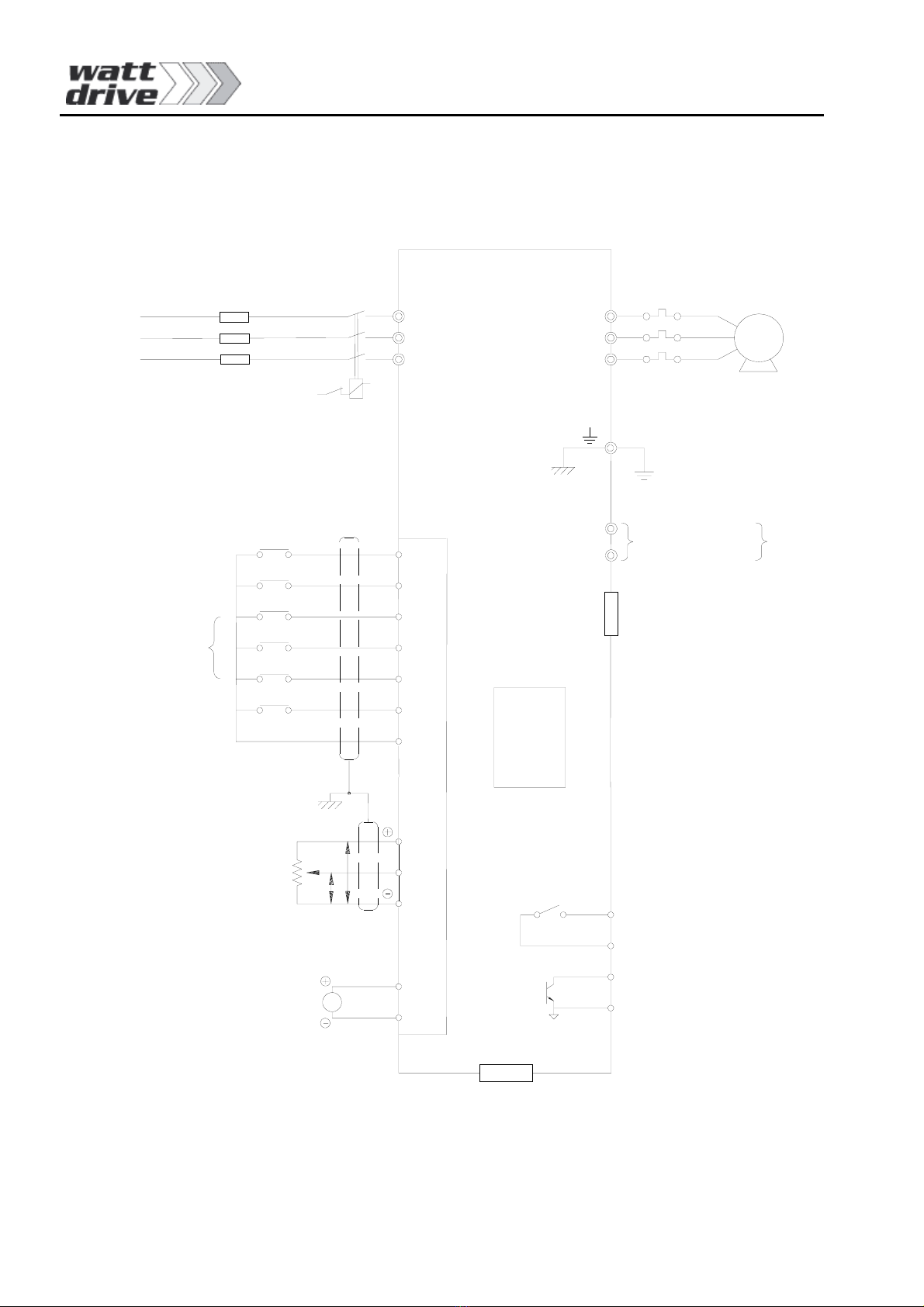
Watt Drive S3 Series User manual











This manual suits for next models
9
Table of contents
Other Watt Drive Inverter manuals




Popular Inverter manuals by other brands

FRONIUS
FRONIUS Personal Display DL operating instructions

Anova
Anova GC900 Instruction and user's manual

Fuji Electric
Fuji Electric FRENIC-Lift LM2 Series Starting guide

Growatt
Growatt 10000HY Installation & operation manual

Autarco
Autarco 4G-STICK instruction manual

Cobra
Cobra CPI 450 operating instructions

Olimpia splendid
Olimpia splendid DUAL INVERTER 14 Instructions for use and maintenance

Sunways
Sunways STT-80K user manual

Toshiba
Toshiba H9 quick start guide

Hitachi
Hitachi HFC-VWA2 SERIES instruction manual

Festo
Festo OVEM operating instructions

Mitsubishi Electric
Mitsubishi Electric FR-C500 instruction manual

Sima
Sima STP-1500 User instructions

LIVOLTEK
LIVOLTEK Hyper 3-5kW Quick installation guide

CUTES
CUTES CT-2000FG Series manual

Tektronix
Tektronix Tektronix SPG8000 Technical reference

Lunt Solar Systems
Lunt Solar Systems LS80THa quick start guide

Ingeteam
Ingeteam INGECON SUN STORAGE 1Play Installation and configuration