- 1 -
Content
1 Introduction........................................................................................................................ 2
1.1 Notation and symbols......................................................................................................... 2
1.2 Intended use....................................................................................................................... 2
1.3 System requirements.......................................................................................................... 2
1.4 License terms...................................................................................................................... 3
2 Installation .......................................................................................................................... 4
2.1 Preparation of the robot..................................................................................................... 4
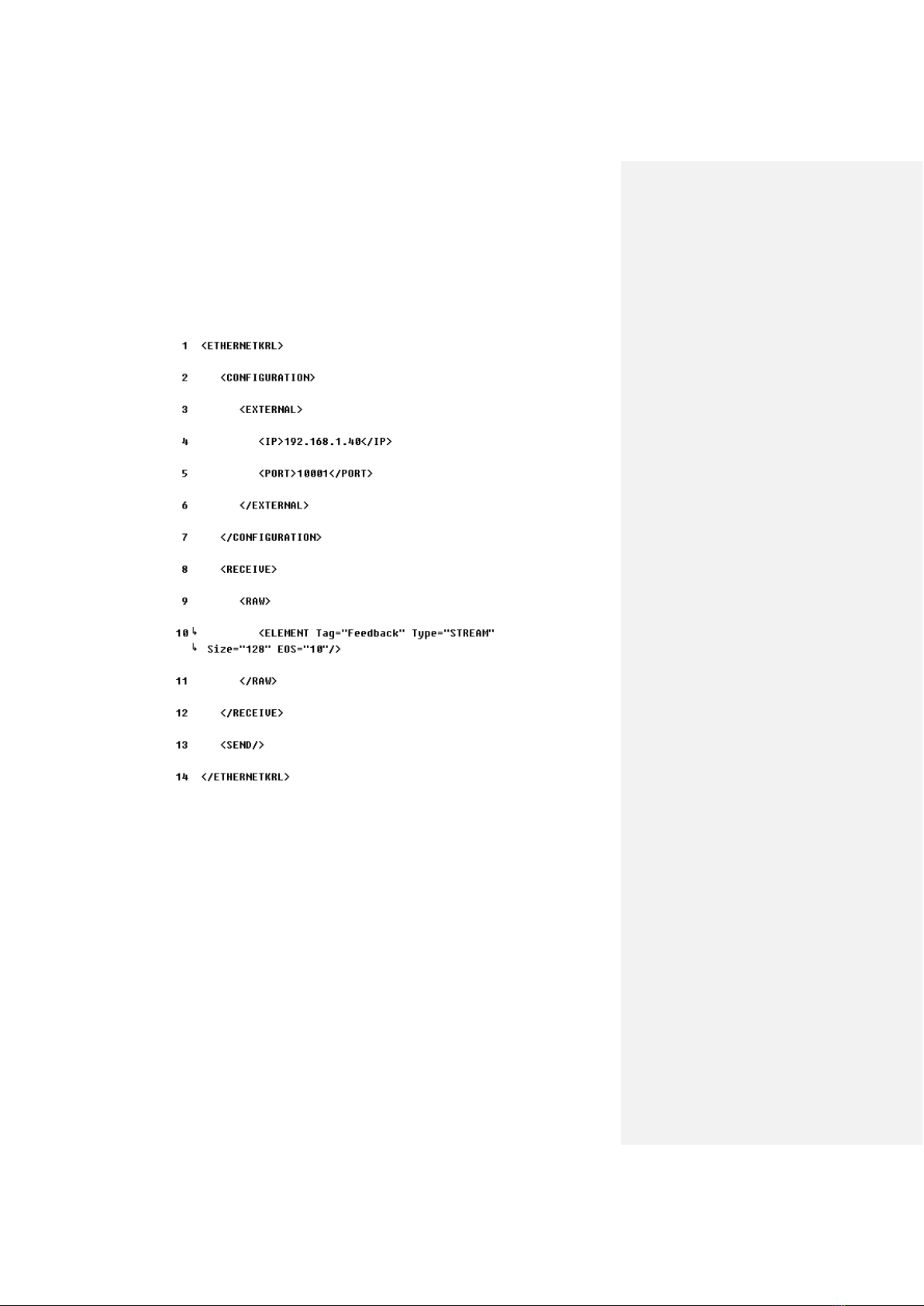
2.2 Configuration of the XML file.............................................................................................. 5
2.3 Installing the software ........................................................................................................ 6
2.4 Behavior in case of error..................................................................................................... 7
3 Command Reference .......................................................................................................... 8
3.1 Establish connection - CONNECT........................................................................................ 9
3.2 Activate device - ENABLE.................................................................................................. 10
3.3 Query grab state - GETSTATE............................................................................................ 11
3.4 Deactivate device - DISABLE ............................................................................................. 12
3.5 Referencing the gripping module - HOME........................................................................ 13
3.6 Gripping the workpiece - GRIP.......................................................................................... 14
3.7 Simultaneous gripping of workpieces - MGRIP................................................................. 15
3.8 Release workpiece - RELEASE ........................................................................................... 16
3.9 Simultaneous release of workpieces - MRELEASE............................................................ 17
3.10 Parameterize gripping recipes - SETGRIPCFG................................................................... 18
3.11 Verify device types - DEVASSERT...................................................................................... 19
3.12 Query of position and sensor values - VALUE................................................................... 20
3.13 Control gripping force retention - CLAMP........................................................................ 21
3.14 Control of the LED display - LED........................................................................................ 22
3.15 Terminating the connection of GRIPLINK and robot - DISCONNECT................................ 23
Gripping state ................................................................................................................... 24
Error numbers and ways to fix them ................................................................................ 25