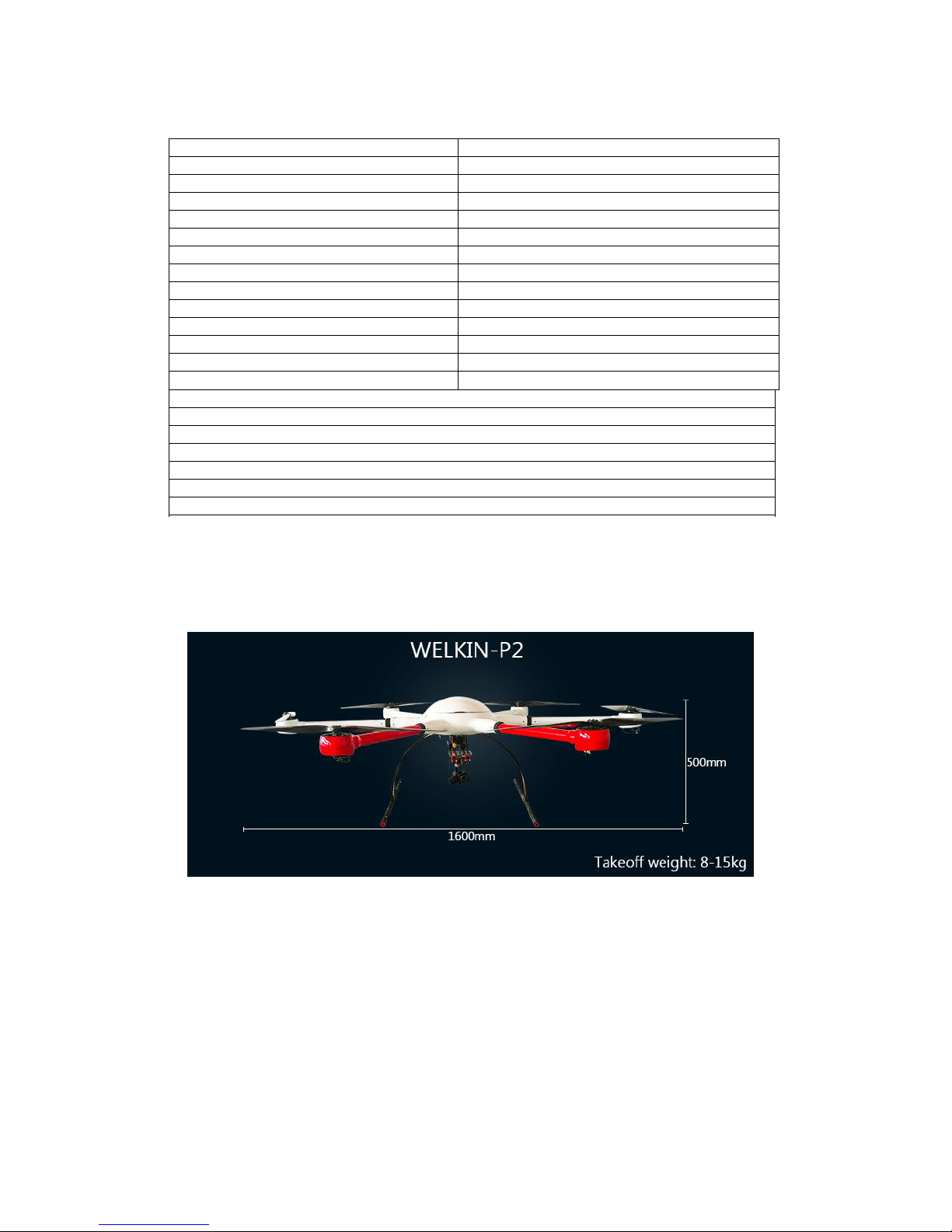
1. System Overview
Productintroduction
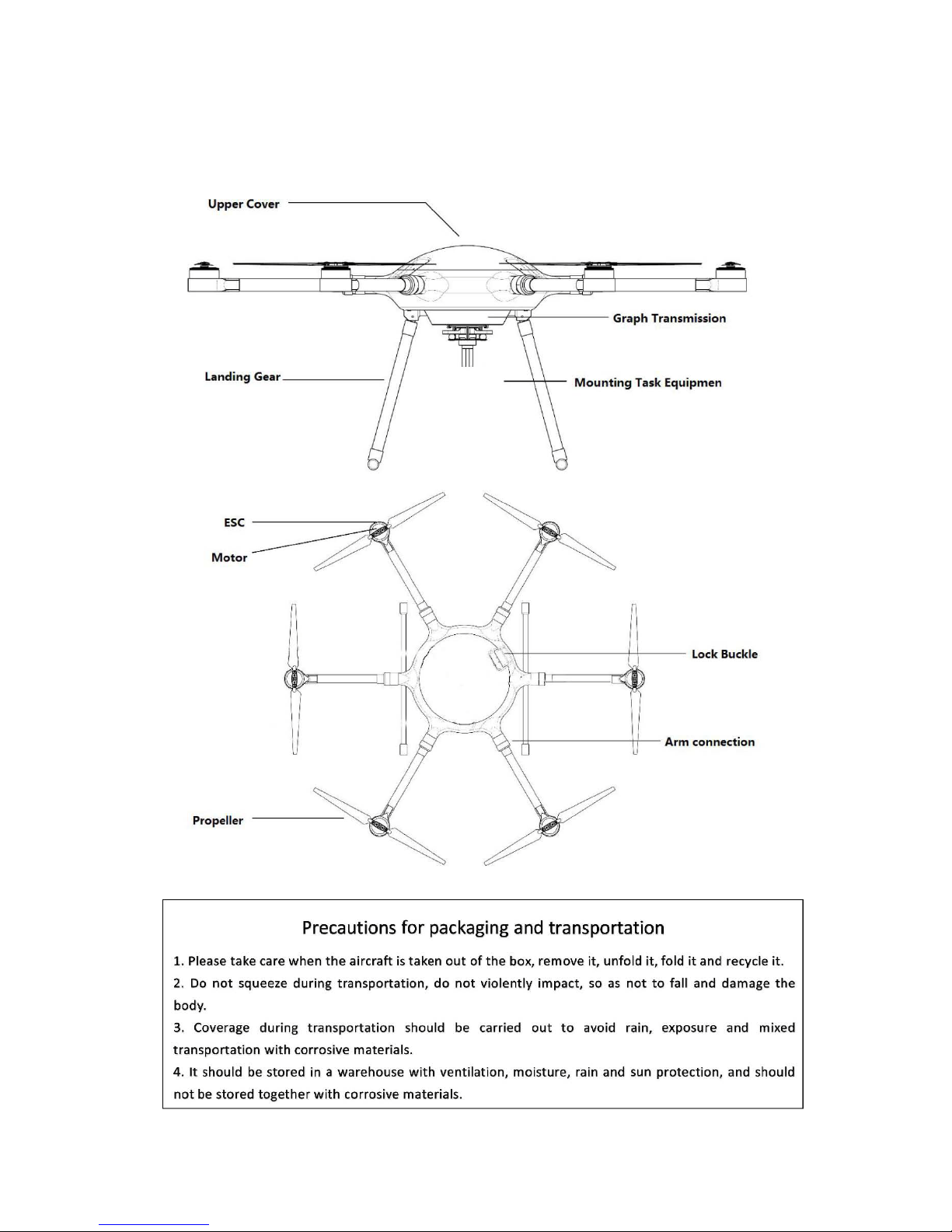
Welkin P2 is an industrial grade drone independently developed by our company. The airframe is made of
carbon fiber material, and the frame, upper cover, arm, landing gear and electric frame are all designed with
light structure. It is lighter and more beautiful while ensuring rigidity and strength. The arm is designed with
umbrella folding, which makes assembly and transportation quicker and more convenient. This product is
equipped with a multi-rotor flight control system independently developed by our company. The advanced
algorithm ensures the stability and safety of theflight platform.
Functionalcharacteristics
?Extra large payload, long enduranceandflight distance
?Quickrelease structure for easy carrying andtransportation
?Rainproofdesign, meet GJB150.8 (onthe standardof rain test)
?Carbonfiber integrated molding body,good rigidity andlight weight
?Windresistance upto 6levels (pass the seatest)
?Precise attitude control
?HD video, image output (in the caseof barrier free, the distance canreach30KM)
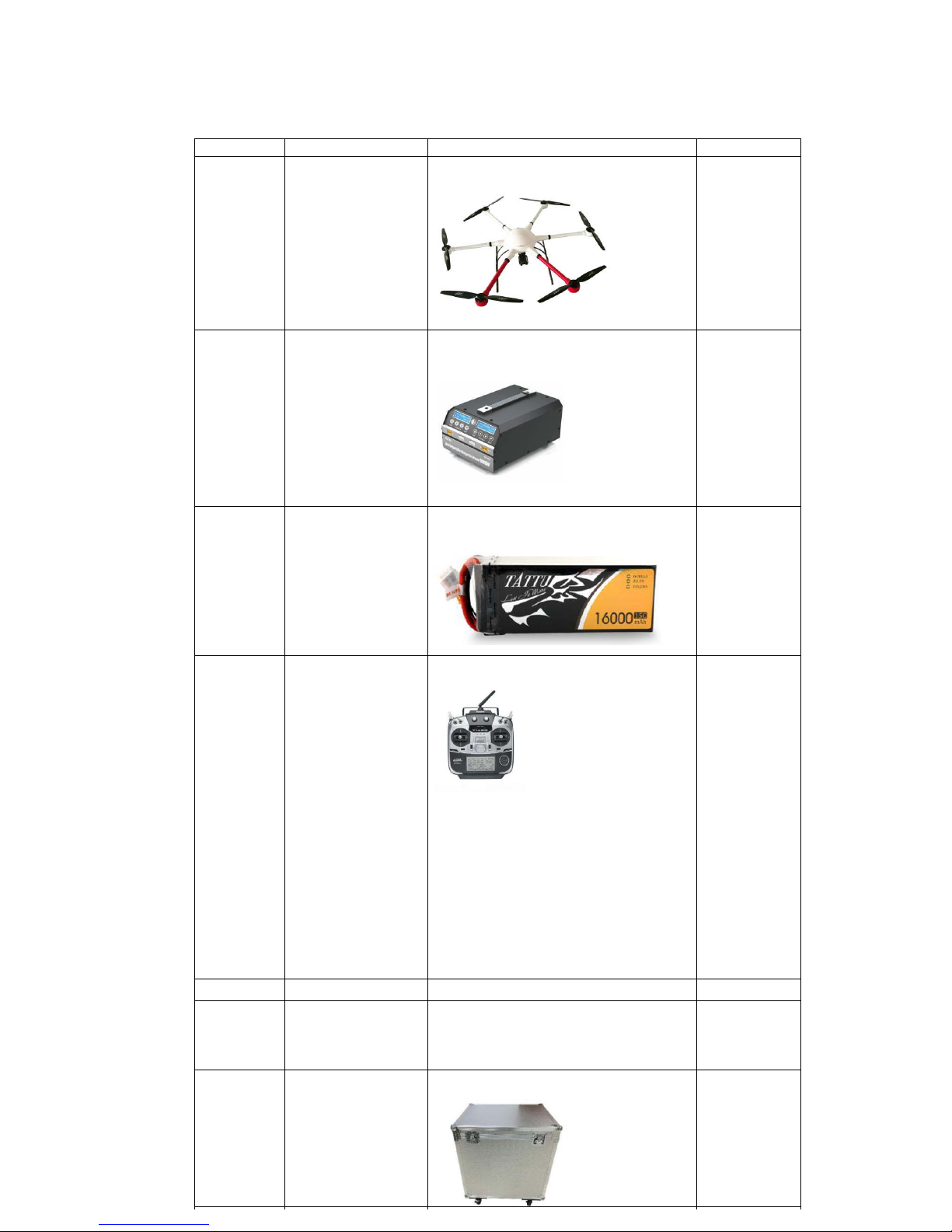
2. Product List
List
In order to facilitate transportation, Welkin P2 adopts a folding design, which has been tested for quality and
flight test before leaving the factory to ensure stable and reliable products. Before you start using it, checkthe
contentsof the package. The following is alist ofWelkin P2 items.