Content
Table of Contents
1. iAStar AS380..................................................................................................1
Characteristic...................................................................................................1
scope of operation...........................................................................................1
2.Overview of system.........................................................................................3
Integrated frequency converter iAStar AS380................................................3
Car controller panel SM02..............................................................................3
Command board panel SM03..........................................................................3
Display & control board SM04.......................................................................3
Special board SM09........................................................................................4
Functional overview........................................................................................4
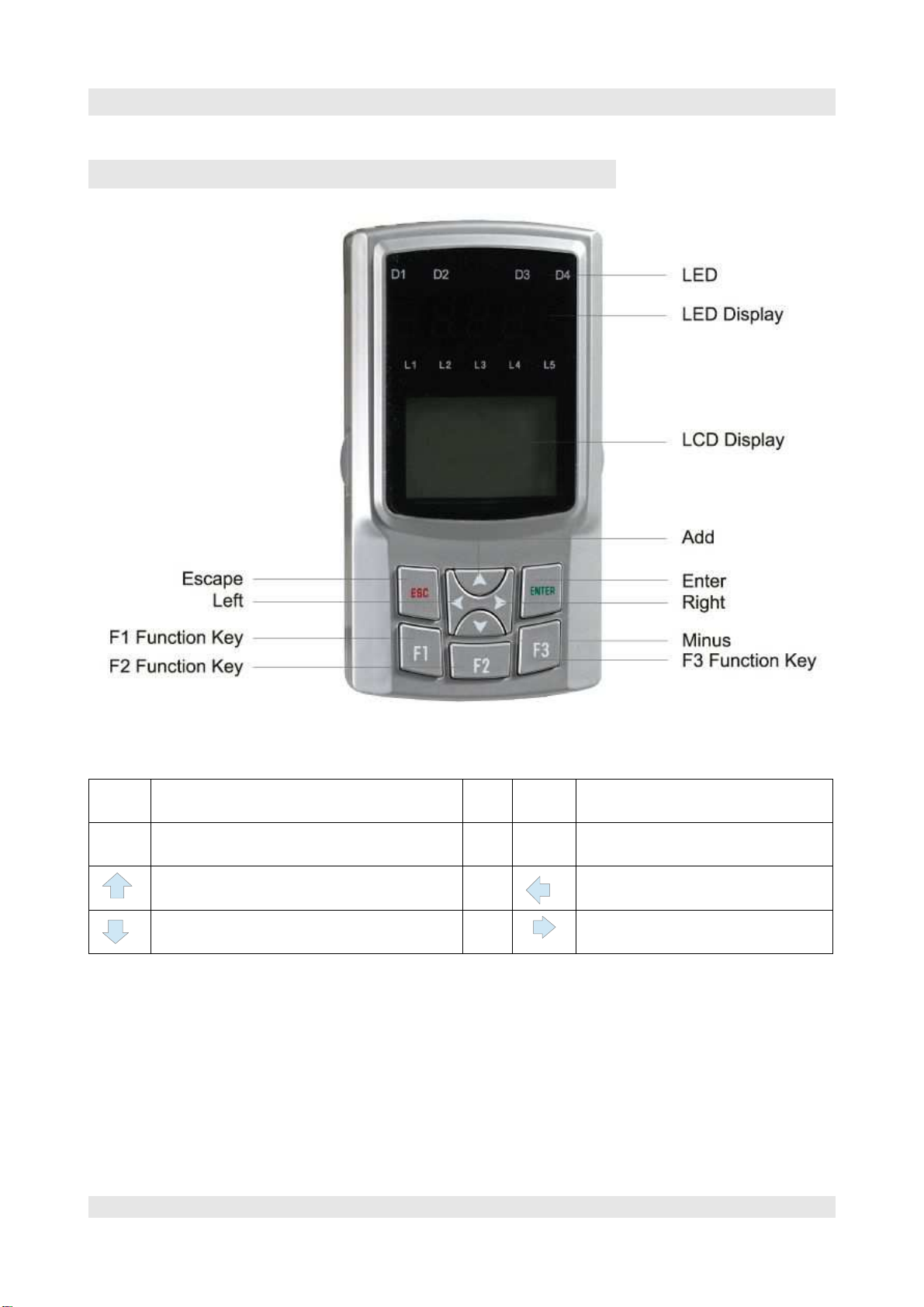
3. Hand device....................................................................................................7
operation:.........................................................................................................8
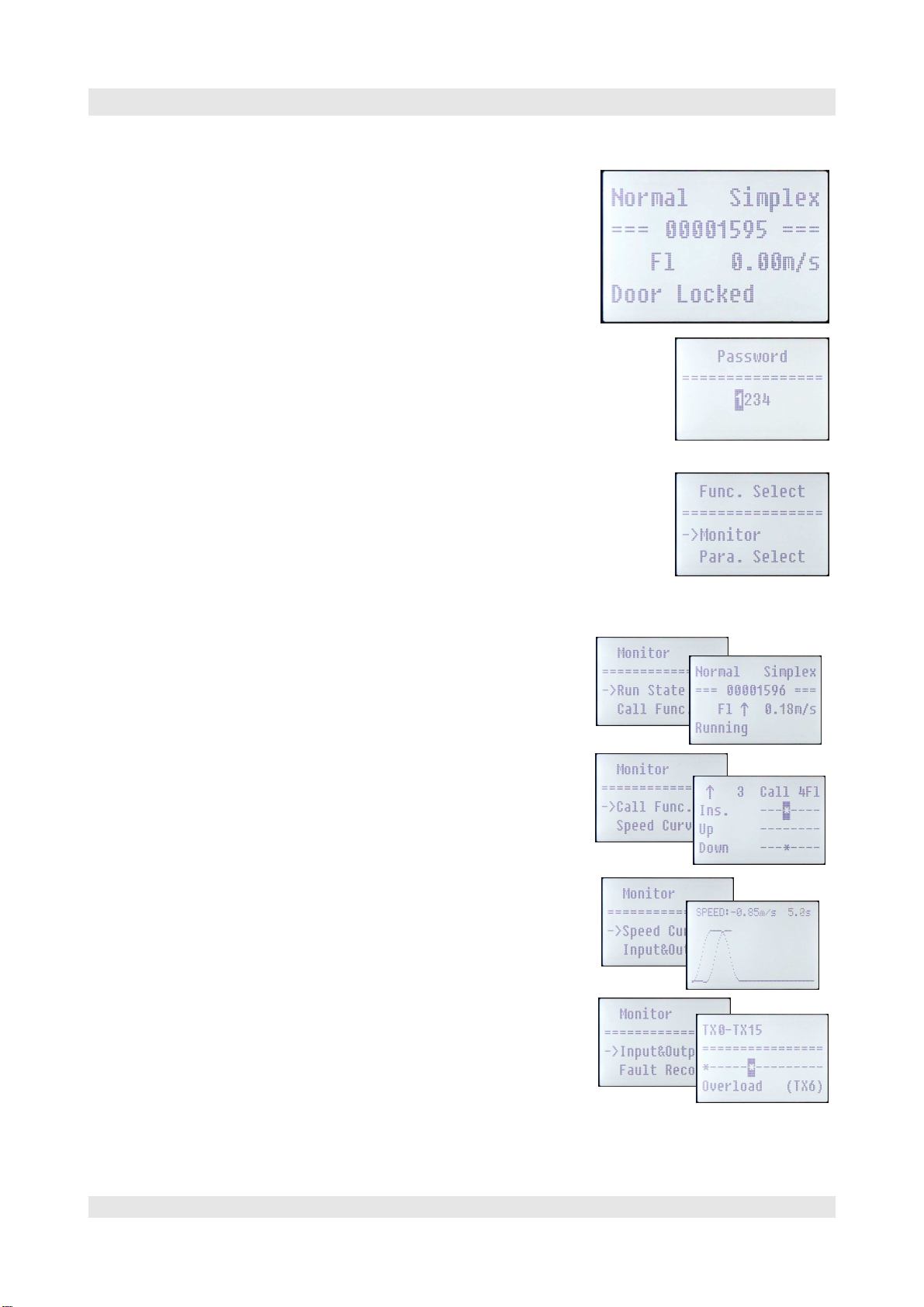
Log in:..............................................................................................................8
Menu................................................................................................................8
State menu under „Monitor“..........................................................................8
To set parameter in the submenu Para.Select..................................................9
different functions (Func.Select)...................................................................11
4. Menu tree & parameter..............................................................................13
Basic Parameter.............................................................................................15
Comfort Adjust:S-Curve...............................................................................15
Comfort Adjust: PI Adjust............................................................................16
5. Commissioning -Installation run................................................................17
Condition for commissioning run:................................................................17
Groupfunction................................................................................................18
Security loop – Return-motion -control........................................................18
First movement with the Return-motion -control..........................................18
Setting the parameters on AS.T030...............................................................18
Checking parameters for commissioning and eventually adapt....................20
Parameter speed controller............................................................................22
HDR Lock Error............................................................................................23
6.shaftcopying..................................................................................................25
Re-levelling -sensor.......................................................................................26
Magnetic switch............................................................................................26
Correction switches.......................................................................................26
Inspection endswitches..................................................................................26
Intelligent Magnetic sensors iMS45...........................................................27
Design and function.......................................................................................27
Correct signal Inputs at AS.T030 (LEDs)....................................................28
7.AS380 Main board AS.T029........................................................................31
AS.T029 connections:...................................................................................31
8.SM02/H cartop box module.......................................................................35
9.SM09IO/B Add-ON module.......................................................................37
10.SM02/G car panel board-module.............................................................39
SM03 button-module.....................................................................................40
11.SM04HRF floor module.............................................................................41
12.Security Section..........................................................................................43