UMAX090690. Version: 1.2 Preliminary Documentation –May Be Subject To Change 3-37
TABLE OF CONTENTS
1. INTRODUCTION.......................................................................................................................6
2. BATTERY CHARGER THEORY OF OPERATION...................................................................7
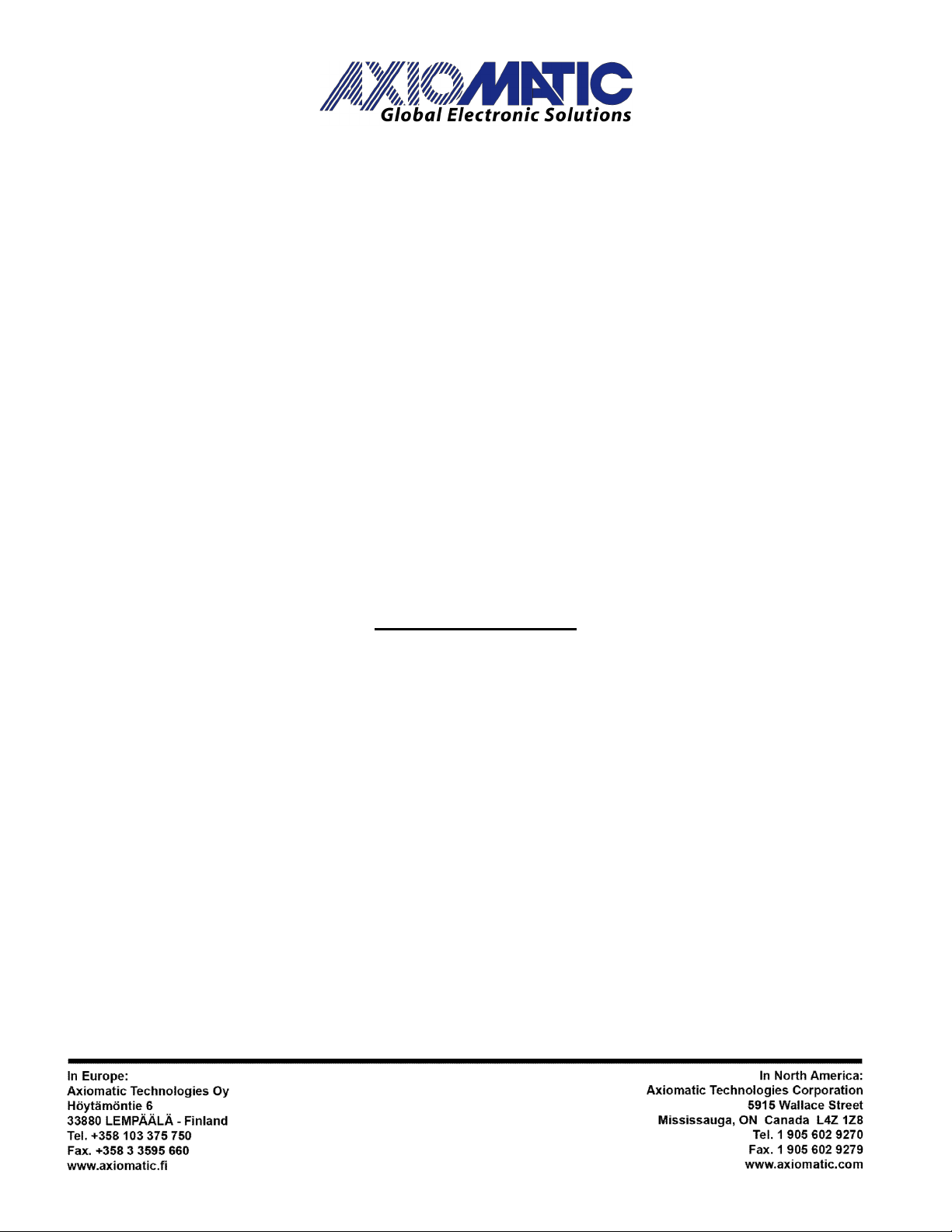
2.1. BATTERY CHARGER MODES ............................................................................................................................... 7
Charger Temperature...................................................................................................................................................8
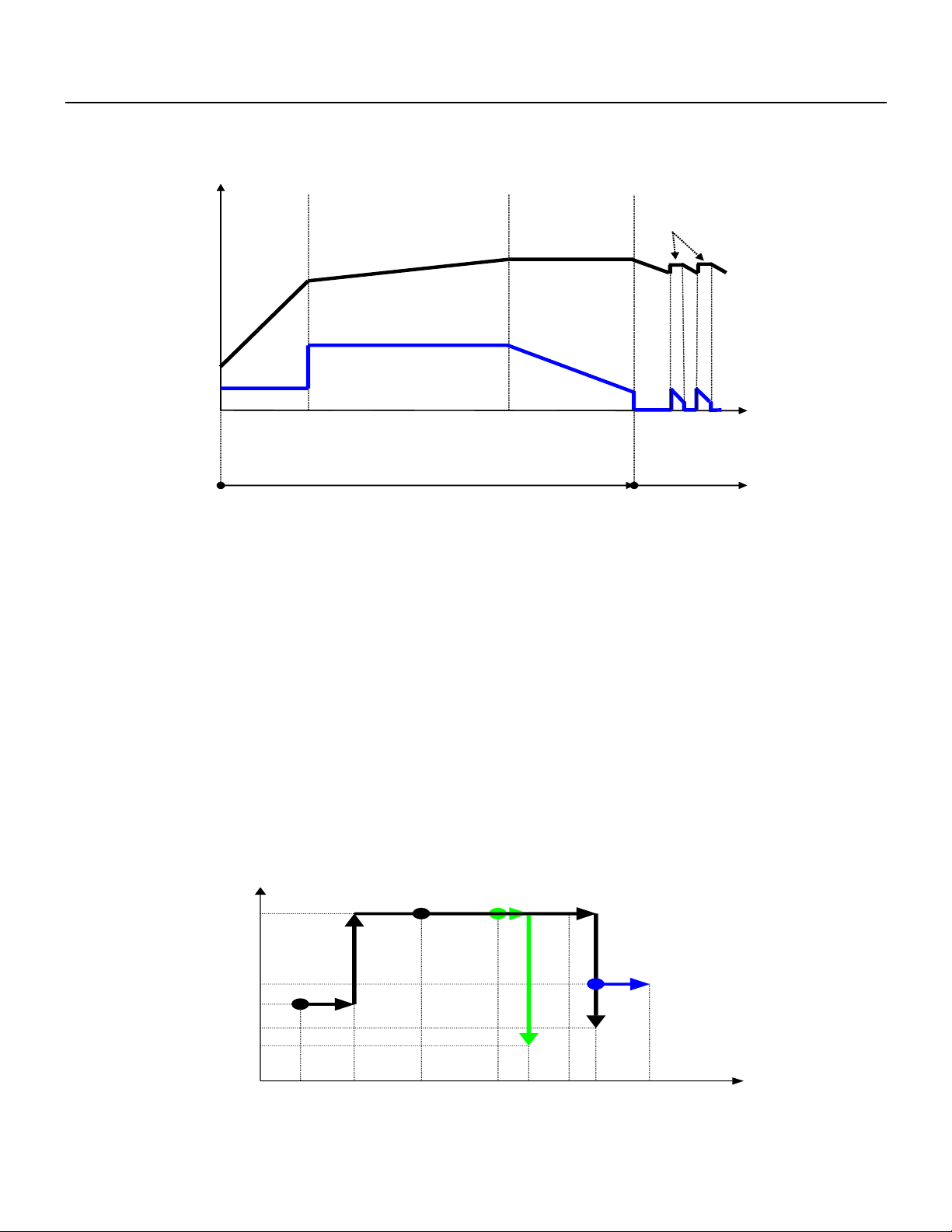
2.2. BATTERY CHARGER STATE DIAGRAM ................................................................................................................. 9
2.3. BATTERY PROTECTION....................................................................................................................................... 9
3. OVERVIEW OF J1939 FEATURES........................................................................................11
3.1. INTRODUCTION TO SUPPORTED MESSAGES....................................................................................................... 11
3.2. NAME,ADDRESS AND SOFTWARE ID................................................................................................................. 12
J1939 Name................................................................................................................................................................ 12
ECU Address ............................................................................................................................................................... 12
Software Identifier .....................................................................................................................................................13
4. BATTERY CHARGER FUNCTION BLOCKS.........................................................................15
4.1. CHARGING PROFILE FUNCTION BLOCKS............................................................................................................ 15
4.2. MISCELLANEOUS INPUT FUNCTION BLOCK ........................................................................................................ 15
4.3. J1939 NETWORK FUNCTION BLOCK ................................................................................................................. 15
4.4. DIAGNOSTIC INPUT FUNCTION BLOCKS ............................................................................................................. 15
4.5. CAN TRANSMIT FUNCTION BLOCK.................................................................................................................... 18
4.6. CAN RECEIVE FUNCTION BLOCK...................................................................................................................... 19
5. ECU SETPOINTS ACCESSED WITH ELECTRONIC ASSISTANT .......................................21
5.1. NETWORK SETPOINTS ...................................................................................................................................... 21
5.2. COMMON CAN SETPOINTS............................................................................................................................... 21
5.3. CHARGING PROFILE SETPOINTS........................................................................................................................ 22
5.4. MISCELLANEOUS INPUT SETPOINTS .................................................................................................................. 24
5.5. DIAGNOSTIC INPUT SETPOINTS ......................................................................................................................... 24
5.6. CAN RECEIVE SETPOINTS................................................................................................................................ 25
5.7. CAN TRANSMIT SETPOINTS.............................................................................................................................. 26
6. BATTERY CHARGER ERROR CODES.................................................................................28
6.1. BATTERY ERROR CODES.................................................................................................................................. 28
7. REFLASHING OVER CAN WITH EA BOOTLOADER.......................................................29
8. INSTALLATION INSTRUCTIONS...........................................................................................34
9. TECHNICAL SPECIFICATIONS.............................................................................................35
9.1. INPUT SPECIFICATIONS..................................................................................................................................... 35
9.2. OUTPUT SPECIFICATIONS ................................................................................................................................. 35
9.3. GENERAL SPECIFICATIONS ............................................................................................................................... 35
10. VERSION HISTORY................................................................................................................37