北京智能佳科技有限公司
Getting started (Bioloid STEM)..........................................................................................................3
Parts List......................................................................................................................................4
BIOLOID STEM STANDARD Parts List......................................................................... 4
BIOLOID STEM EXPANSION Parts List........................................................................ 7
Robot In Action.........................................................................................................................10
Downloading the Program................................................................................................ 10
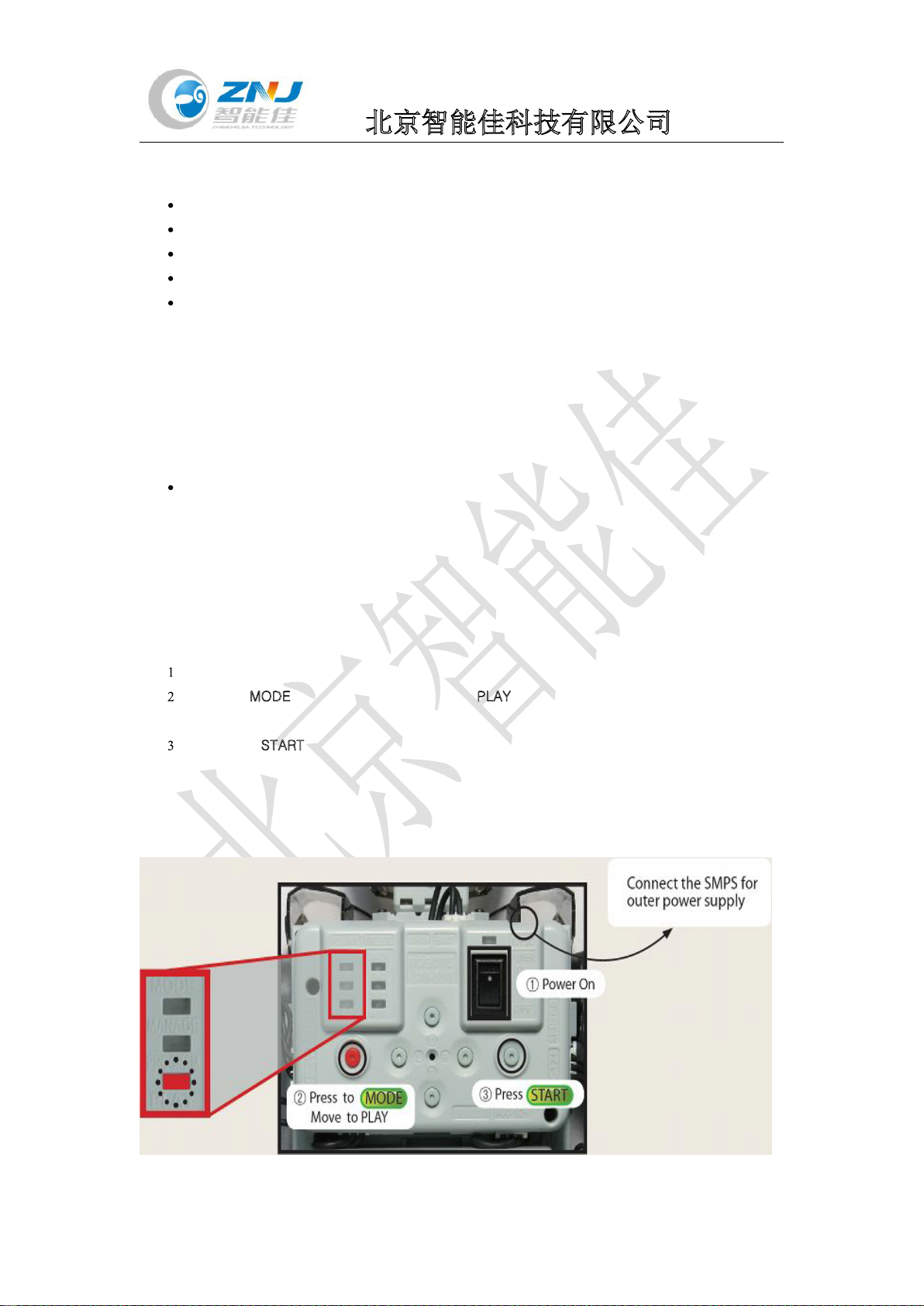
Turning the Robot on........................................................................................................ 10
Assembly Check................................................................................................................11
Charging.................................................................................................................................... 12
Charging Time and Battery Life/Operating......................................................................13
Download (Bioloid STEM)...............................................................................................................13
Standard Example Robots.........................................................................................................13
Expansion Example Robots...................................................................................................... 17
Useful Information (Bioloid STEM).................................................................................................22
Replacing the Fuse.................................................................................................................... 22
Dynamixel Management........................................................................................................... 23
Changing the ID................................................................................................................ 23
Changing the Movement Mode........................................................................................24
Troubleshooting................................................................................................................ 25
ZIGBee Wireless Control..........................................................................................................27
ZIGBee.............................................................................................................................. 25
Controller & Zigbee.......................................................................................................... 27